
Fターム[5H505JJ17]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | メモリ (852)
Fターム[5H505JJ17]に分類される特許
81 - 100 / 852
電動船外機
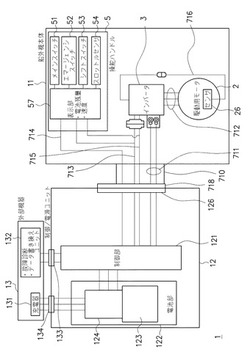
【課題】電動船外機の操作性の向上を図るとともに船舶のスペースを圧迫しない電動船外機を提供する。
【解決手段】直流電流を交流電流に変換するインバータ3およびインバータ3が変換した交流電流によって駆動する駆動用電動機2を有する船外機本体11と、インバータ3に直流電流を供給する電池部122および船外機1を制御する制御部121を有し船外機本体11とは別体に構成される制御/電源ユニット12と、電池部122とインバータ3とを直流電流を供給可能に接続する第一主電力線711および船外機本体11と制御部121とを信号を送受信可能に接続する第一信号線715と含む接続ケーブル710とを備え、インバータ3が変換した交流電流を駆動用電動機2に供給するための第二主電力線712が船外機本体11の後側に配策され、第一信号線715が船外機本体11の前側に配策される。
(もっと読む)
電力変換装置

【課題】スイッチングトランジスタの異常を精度よく検知することのできる電力変換装置を提供する。
【解決手段】電力変換装置が備えるスイッチング回路SWには、並列に接続された2個のトランジスタTra、Trbと、各トランジスタの温度を計測する温度センサQa、Qbが備えられている。電力変換装置のコントローラは、温度センサが計測した2個のトランジスタの温度差が予め定められた温度差閾値を超えている場合に、そのスイッチング回路SWに含まれるトランジスタに異常が発生していることを示す診断結果を出力する。
(もっと読む)
電気自動車
【課題】トルク重視の走行モードと経済性重視の走行モードを切り換えることのできる電気自動車を提供する。
【解決手段】モータを制御するコントローラは、モータのトルク指令に相当する電流指令値をdq座標系におけるd軸成分Idとq軸成分Iqに分解し、それら成分IdとIqを3相UVWの指令値に変換してインバータへ出力する。コントローラは、電流指令値に対して最大トルクを出力するIdとIqの組を与えるトルク優先マップと、電流指令値に対してモータ損失が最小となるIdとIqの組を与える効率優先マップを切り換えて用いることができる。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の検出値をフィードバック制御するための操作量としての指令電圧の1電気角周期に渡る積分値をゼロにフィードバック制御する場合、電気角の検出値に誤差が生じることで、電流の検出値に重畳されたオフセット誤差を適切に補正できないこと。
【解決手段】モデル予測制御部30では、モデル予測制御によってインバータINVの今回の操作状態を表現する電圧ベクトルViを選択する。積分値算出部40では、電圧ベクトルViを入力とし、各相の印加電圧の積分値Δvu,Δvv,Δvwを算出する。補正部44u,44v,44wでは、これらをゼロにフィードバック制御すべく実電流iu,iv,iwを補正する。
(もっと読む)
同期モータ駆動装置およびそれを備えた冷凍サイクルを有する機器
【課題】簡易な構成で、精度の良い有効電力の計算および入力交流電流の推定が可能な同期モータ駆動装置およびそれを備えた冷凍サイクルを有する機器を提供する
【解決手段】マイクロコンピュータ(A1)により、3相のインバータを有するインバータ回路(3)の直流電流(Idc)を、同期モータ(4)の機械的一回転の周期に亘って測定し、3相の各インバータの瞬時電力を計算する。3相の各インバータの瞬時電力から同期モータ駆動装置(MD1)の有効電力を算出し、さらに、商用交流入力電流(Iac)の実効値を推定する。
(もっと読む)
多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置
【課題】 回転角センサの取り付け位置ずれ等による角度誤差を、多相回転機を搭載対象に搭載したままの状態で検出する多相回転機の制御装置を提供する。
【解決手段】 3相モータ(多相回転機)の制御装置であるマイコンは、モータに取り付けられた回転角センサの取り付け位置ずれ等による角度誤差Δθを算出する処理を実行する。まず、d軸およびq軸電流指令値を0アンペアに設定する(S00)。次に、モータの回転軸を外部から回転させ(S10)、逆起電圧によって流れる相電流を検出し(S30)、3相2相変換する(S40)。制御器は、電流検出値が0アンペアになるように電圧指令値Vq、Vdを出力する(S50)。角度誤差算出手段は、電圧指令値Vq、Vdに基づいて角度誤差Δθを算出し(S70)、角度補正値として記憶する(S90)。以後、回転角センサの検出値から補正値を差し引いて補正する。
(もっと読む)
回転機の制御装置
【課題】デッドタイム付与後の実際のスイッチング状態の切替タイミングが複数のレッグ間で重なることで、サージ電圧が大きくなるおそれがあること。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータINVの出力電圧ベクトルのノルムを設定する。位相設定部26では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部34では、ノルム設定部30によって設定されたノルムVnと、位相設定部26によって設定された位相δとに基づき操作信号を生成してインバータINVに出力する。操作状態設定部34には、デッドタイム付与後における実際のスイッチング状態の切り替えが複数レッグで同時になされない波形が記憶されている。
(もっと読む)
射出成形機
【課題】モータの回生電力を効率的に回生できる、射出成形機を提供すること。
【解決手段】モータと、前記モータを駆動する駆動回路と、前記駆動回路に電力を供給する整流器102とを備える射出成形機であって、前記モータの回生電力の回生経路82が整流器102に並列接続され、前記駆動回路と整流器102との間の直流電力を交流電力に変換するブリッジ回路104と、ブリッジ回路104によって変換された交流電力が入力される高調波成分抑制部63とを回生経路82に備えるとともに、ブリッジ回路104によって変換された交流電力の電流波形が正弦波になるようにブリッジ回路104の動作を制御するコントローラ26を備えることを特徴とする、射出成形機。
(もっと読む)
回転機の制御装置
【課題】変調率が過度に大きくなる場合、制御量とその指令値との差を入力とする積分要素の出力値を参照するモデル予測制御によって、かえって制御性の低下を招くこと。
【解決手段】インバータの次回の操作状態を表現する電圧ベクトルV(n+1)は、ステップS20において、評価関数Jを最小とする電圧ベクトルに決定する。ここで、偏差edq(n+2)は、次回の操作状態として仮設定されたものによる予測電流ide(n+2),iqe(n+2)と指令電流idr,iqrとの差である。また、仮積分値Intは、前回までに採用された電圧ベクトルによって生じる偏差を入力とする積分要素の出力値(積分値In)に偏差edq(n+2)にゲインKiを乗算した値を加えたものである。ステップS28において変調率Mが閾値Mth以上であると判断される場合、積分値Inの更新を禁止する。
(もっと読む)
電動機の可動子の温度を検出する温度検出装置
【課題】電動機の可動子を過熱保護するために電動機の可動子の温度を検出することができる温度検出装置を提供する。
【解決手段】永久磁石同期電動機5の可動子52の温度を検出する温度検出装置10は、永久磁石同期電動機5の固定子53に設けられた巻線55u,55v,55wのU相交流電流値Iu、V相交流電流値Iv及びW相交流電流値Iwを検出する電流検出部11と、U相交流電流値Iu、V相交流電流値Iv及びW相交流電流値Iwを用いて可動子52の鉄損pを推定する鉄損推定部12と、鉄損pを用いて可動子52の温度を推定する可動子温度推定部13と、を有する。
(もっと読む)
モータ制御装置およびそれを用いた電動パワーステアリング装置
【課題】複数相のモータを制御するモータ制御装置において、対象とする相に開放状態の故障が発生した場合に、いずれの相に開放状態の故障が発生したか否かを、迅速かつ正確に検知するモータ制御装置およびそれを用いた電動パワーステアリング装置を得る。
【解決手段】電源電圧Vbが所定電圧Vthr以上、かつ、モータ回転速度ωが所定速度ωthr以下、かつ、対象とするx相電圧指令Vx*がゼロ付近でなく、かつ、対象とするx相の電流Ixが所定電流Iu_thr以下、かつ、制御誤差が所定誤差以上である状態が所定時間以上検出された場合に、対象とするx相に開放状態の故障が発生したと判定する。
(もっと読む)
同期電動機の駆動装置
【課題】同期電動機の力率及びトルクを簡便な方法で高精度に制御することができる同期電動機の駆動装置を提供する。
【解決手段】同期電動機の実速度と速度基準との偏差に基づいて、同期電動機のトルク基準を算出する速度制御手段と、同期電動機の電機子に流れる電流、同期電動機の界磁に流れる電流、電機子の反作用インダクタンスの算出値に基づいて、同期電動機の内部相差角を算出する磁束演算手段と、トルク基準と内部相差角とに基づいて、同期電動機の力率が1となるように、電機子の電流基準を算出する電流基準演算手段と、電機子に流れる電流と電機子の電流基準との偏差がなくなるように、同期電動機に流れる電流を制御する電流制御手段と、磁束演算手段が内部相差角を算出する際に利用する電機子の反作用インダクタンスの算出値を同期電動機の負荷状態に応じて変化させるパラメータ演算手段と、を備えた。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
電力ライン制御装置
【課題】モータ駆動電力ラインおよび発電電力ラインを電磁リレーで切り替えるにあたり、電磁リレーの溶損回避を図る。
【解決手段】モータ駆動および発電作動のいずれかに切り替え可能なモータ発電機22と、モータ駆動に要する駆動電力をバッテリ19からモータ発電機へ流すモータ駆動電力ラインLmと、発電作動による発電電力をモータ発電機から電気負荷およびバッテリへ流す発電電力ラインLgと、これらの電力ラインとモータ発電機との間に電気接続されたインバータ23と、両電力ラインを切り替える電磁リレー25と、モータ発電機が有するU相コイル、V相コイルおよびW相コイルの少なくとも1つをグランドショートさせるよう、インバータが有するスイッチング素子を制御するショート制御手段と、を備える。そして、ショート制御手段によりグランドショートさせた状態で、電磁リレーを切り替え作動させる。
(もっと読む)
エレベータ制御装置
【課題】エレベータ制御装置のインバータ内のスイッチング素子の、経過時間に対する温度変化を少なくして空冷し、かつ回生抵抗器も空冷する。
【解決手段】実施形態によれば、スイッチング素子を介してインバータの直流側と接続され、電動機の回生電力を消費する回生抵抗器と、回生抵抗器およびインバータを空冷するためのファンと、乗りかごの荷重値を検出する荷重検出手段と、行先階を検出する行先階検出手段とをもつ。また、この実施形態によれば、検出した行先階と荷重値をもとに、運転開始前に、運転に伴うインバータ内のスイッチング素子と回生抵抗器の温度変化パターンを予測する温度変化予測手段と、予測した温度変化パターンをもとに、経過時間に対するインバータ内のスイッチング素子の温度変化の値が所定の基準値以下となり、かつ回生抵抗器が空冷されるように、ファンの駆動電圧および駆動時間を制御するファン制御手段とをもつ。
(もっと読む)
駆動装置および電動車両
【課題】パルス幅変調制御によるインバータの制御から矩形波制御によるインバータの制御への切替時にインバータの制御性が低下するのを抑制する。
【解決手段】インバータをPWM制御によって制御するか矩形波制御によって制御するかに拘わらず、電圧位相指令θs*の今回値と前回値との差分としての電圧位相指令変化量Δθsが変化許容値θslim以下となるよう電圧位相指令θ*を設定し(S330〜S430)、設定した電圧位相指令θs*を用いて次の切替電気角θswやスイッチングパターンを設定する(S440,S450)。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
モータ駆動回路、および、モータ駆動システム
【課題】MCUの限られた数のポートで伝達する情報の種類を増加させる。
【解決手段】モータ駆動回路は、MCU300が出力した信号が入力される第1のポートP1を備え、第1のポートP1を介して入力された入力信号のデューティを測定し、デューティ情報信号を出力するデューティ測定回路100aと、入力信号の周波数を測定し、この測定した周波数に応じた周波数情報信号を出力する周波数測定回路100bと、デューティ情報信号および周波数情報信号の何れか一方に基づいて、MCU300が指令したモータの回転速度を計算し、この計算した回転速度の情報を含む回転速度情報信号を出力する指令速度計算回路100cと、回転速度情報信号と、デューティ情報信号および周波数情報信号の残りの他方により得られた情報とに基づいて、モータを指令された回転数で駆動するためのPWM信号である駆動制御信号を生成するモータ駆動波形制御回路100eを備える。
(もっと読む)
昇圧コンバータの制御装置
【課題】駆動電圧系の電圧の目標電圧への追従性を向上させる。
【解決手段】昇圧コンバータのデューティ指令値Dutyは、電池電圧系電力ラインの電圧VLから昇圧されている駆動電圧系電力ラインの電圧VHとバッテリの充放電電力とが変動していない所定の定常状態のときには前回Dutyから前回Dffを減じることにより更新されると共に所定の定常状態でないときには更新されずに保持される力行時推定項Dadj1または回生時推定項Dadj2と(S150,S160,S260,S270)フィードフォワード項Dffとフィードバック項Dffとの和として設定される(S220,S330)。即ち、所定の定常状態でない状態になったときでも、フィードバック項Dfbとは別に、装置の個体差に応じた値として所定の定常状態のときに更新される力行時推定項Dadj1または回生時推定項Dadj2を一部に加えてデューティ指令値Dutyが設定される。
(もっと読む)
電動機駆動装置
【課題】リアクトル電流を検出してコンバータの制御に用いるものにおいて、リアクトル電流を精度をより向上させる。
【解決手段】昇圧コンバータが動作中で且つオフセット学習が完了しているときには(S100,S110)、バッテリの充放電電流IbからリアクトルLの電流ILを減じた電流差を補正量ΔILに設定し(S130)、リアクトルLの電流ILとオフセット学習量IL0と補正量ΔILとの和を昇圧コンバータ55の制御に用いるリアクトル電流ILとして設定する(S140)。これにより、リアクトル電流ILの精度をより向上させることができ、ひいては昇圧コンバータ55の制御性をより向上させることができる。
(もっと読む)
81 - 100 / 852
[ Back to top ]