
Fターム[5H505LL01]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620)
Fターム[5H505LL01]の下位に属するFターム
アナログ値で検出するもの (110)
デジタル値で検出するもの (278)
速度検出器を用いないで速度を検出するもの (581)
検出器を複数台設けるもの
Fターム[5H505LL01]に分類される特許
201 - 220 / 651
車両駆動用電動機の制御装置

【課題】車両の加減速時において車両駆動用電動機の目標トルク値の時間変化率を適切に制御し、車両の前後振動などを適切に抑制する車両駆動用電動機の制御装置を提供する。
【解決手段】制駆動ECU5は、アクセル開度信号および車両の車速信号に基づきモータ1目標トルク値を求め、車両の車速信号に基づき車両がその車速で定速走行するときにモータ1に必要とされるバランストルク(基準トルク値)を求め、車両の加減速時において目標トルク値がバランストルク値をまたいで変化する場合に、目標トルク値がバランストルク値に近づいたとき、目標トルク値の時間変化率が小さくなるように制限する。
(もっと読む)
電動機の制御装置および制御方法

【課題】1台の電圧形インバータで誘導電動機と同期電動機の双方を所望の速度に制御する。
【解決手段】誘導電動機速度制御器12は、誘導電動機1の回転速度指令値ωIM*と、誘導電動機1の回転速度ωIMとの偏差から比例積分制御等により磁極方向電流指令値Id*を演算する。同期電動機速度制御器13は、同期電動機2の回転速度指令値ωSM*と、同期電動機2の回転速度ωSMとの偏差から比例積分制御等により磁極直交方向電流指令値Iq*を演算する。dq軸電流制御器14は、磁極方向電流指令値Id*と磁極方向電流値Idとの偏差、および、磁極直交方向電流指令値Iq*と磁極直交方向電流値Iqとの偏差から、比例積分制御等により磁極方向電圧指令値Vd*および磁極直交方向電圧指令値Vq*を演算する。
(もっと読む)
電動機駆動装置の制御装置
【課題】動作点範囲が大きくなり得る交流電動機を制御するのに好適な電動機駆動装置の制御装置を提供する。
【解決手段】電流制御部と、電圧制御部と、電流制御周期Piを交流電動機の目標トルクTMに基づいて決定する電流制御周期決定部と、電圧制御周期Pvを交流電動機の回転速度ωに基づいて決定する電圧制御周期決定部と、電流制御周期決定部及び電圧制御周期決定部の決定に基づいて、電流制御周期Pi及び電圧制御周期Pvを設定する制御周期設定部と、を備え、電流制御周期決定部は、目標トルクTMが小さくなるに従って連続的又は段階的に長くなる値を、目標トルクTMに応じて電流制御周期Piとして決定し、電圧制御周期決定部は、回転速度ωが低くなるに従って連続的又は段階的に長くなる値を、回転速度ωに応じて電圧制御周期Pvとして決定する。
(もっと読む)
動力発生装置
【課題】トルク変化時に、ピーク電流を低減しながら磁束を増加させ、高効率の運転を実現すること。
【解決手段】誘導電動機30と、誘導電動機30に電流を供給するインバータ回路31を有し、インバータ回路31はトルクの絶対値を増加させる前に、誘導電動機30のスベリ周波数をほぼ零として入力電流を増加させる期間を有する動力発生装置とすることにより、必要となる磁束の増加を優先的かつ自動的に得ることができ、簡単な構成でありながら、過大電流も防ぎ、効率も高くできる。
(もっと読む)
洗濯乾燥機
【課題】誘導電動機の駆動条件をより的確に規定し、特に乾燥時の必要トルクを確保し、誘導電動機への電流を抑えること。
【解決手段】洗濯および乾燥される衣類30を収納するドラム31と、ドラム31を回転させる誘導電動機33と、誘導電動機33に電力を供給するインバータ回路34と、ドラム31内に乾燥用の空気を加熱する加熱手段35を有し、洗濯時にはインバータ回路34は誘導電動機33を駆動し、乾燥時にはインバータ回路34が誘導電動機33を駆動するとともに加熱手段35が動作し、インバータ回路34は、洗濯時と乾燥時に同等のスベリ周波数の電力を誘導電動機33に供給することにより、誘導電動機33への電流を抑え、効率も高めつつ駆動できる。
(もっと読む)
一体形調節器を有する電気モータの駆動インバータ
本発明は、駆動インバータに関し、この駆動インバータは、電気モータ(6)の相に結合されるべき端子盤(4)に電流を供給する交流電流発生器(3)と、電力ライン(20)と、電気モータに電力供給する相のうちの幾つかに設けられた交流電流センサ(41,42)と、電力ラインに設けられた電流センサ(21)と、電流源からの限界電流の少なくとも1つの値及び所要のトルク指針を含む情報を受け取る入力(52)と、トルク指針に基づいて電気モータの相電流を駆動する一方で、電流源からの限界電流に基づいて電力ラインの電流を許容値に維持するコントローラと、を有する。したがって、電流源を損傷させる恐れなく、最大電流を常時、電流源に課すことができる。 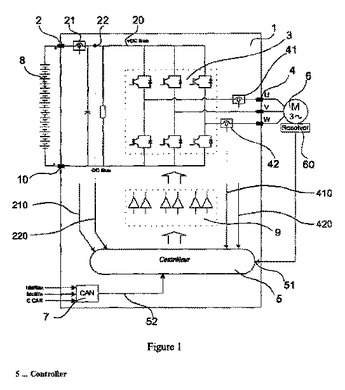 (もっと読む)
(もっと読む)
電気機械のトルクの妥当性検査の方法、および同方法を実行し、電気機械を制御する機械制御器
本発明は、機械モデルに基づいて計算された電気機械(1)のトルク(TrqEmMdl)の妥当性検査の方法に関する。計算されたトルク(TrqEmMdl)と電気機械(1)の回転数(n)とから、電気機械(1)の電磁出力の第1の値(PwrEmMdl)が求められる。ステータ電流(IsU、IsV、IsW)とステータ線間電圧(UsU、UsV、UsW)とから、ステータ固定の参照座標系におけるステータ電流成分(IsA、IsB)とステータ線間電圧成分(UsA、UsB)が計算される。ステータ電流成分(IsA、IsB)とステータ線間電圧成分(UsA、UsB)とから電気機械(1)の電磁出力の第2の値(PwrEmSens)が求められる。電気機械(1)の電磁出力の第1の値(PwrEmMdl)の、電気機械(1)の電磁出力の第2の値(PwrEmSens)からの偏差が、所定の出力閾値(PwrErrLim)を超えている場合には、機械モデルに基づいて計算された電気機械(1)のトルク(TrqEmMdl)は妥当でないと評価される。  (もっと読む)
(もっと読む)
車両のモータ制御装置
【課題】車両に搭載された交流モータに流れる電流を検出する電流センサのゲイン誤差の影響を補正して、電流センサの出力に基づくモータ制御精度を向上させる。
【解決手段】交流モータ13の停止中に無効電流指令を行ったときのV相及びW相の電流指令値Iv ,Iw と電流センサ58,59の出力iv ,iw とに基づいて、電流センサ58,59のゲイン誤差の比(kv /kw )を算出するが、交流モータ13のロータ回転停止位置がIv 又はIw =0となる回転位置の場合には、交流モータ13の停止中でロック機構がロック状態のときにトルク発生電流指令を行い、このトルク発生電流指令を行ったときの電流指令値Iv ,Iw と電流センサ58,59の出力iv ,iw とに基づいて、電流センサ58,59のゲイン誤差の比(kv /kw )を算出する。このゲイン誤差の比を用いて電流センサ58,59の一方の出力を補正してゲイン誤差の不均衡を補正する。
(もっと読む)
電圧形インバータの制御装置
【課題】電動機のPWM領域でスイッチング周波数制御の応答が遅くともスイッチング周波数をほぼ一定に保つことを目的とする。
【解決手段】
電流追従型PWM制御回路を用いた電圧形インバータの制御装置において、インバータのスイッチング周波数を検出するスイッチング周波数検出回路と、前記スイッチング周波数検出がスイッチング周波数指令値に従うようヒステリシスの大きさを制御するフィードバック制御回路と、電動機の回転数と電流基準とに基づき、所望スイッチング周波数を得るヒステリシスとなるように、ヒステリシスの大きさを制御するフィードフォワード制御回路とを有し、前記フィードバック制御回路と前記フィードフォワード制御回路に基づき、前記電流追従型PWM制御回路のスイッチング周波数を支配するヒステリシスを算出することを特徴とする電圧形インバータの制御装置。
(もっと読む)
モータドライブシステム
【課題】 モータドライブシステム装置内で発生する高調波を低減することを達成する。
【解決手段】 電動機4のステータ巻線の一部は第1インバータ2と接続され、また電動
機4のステータ巻線の一部は第2インバータ3と接続される。位相制御によって、第1イ
ンバータ2と第2インバータ3の出力電圧が互いに30°の位相差を以って出力する。位
相差を持った第1インバータ2と第2インバータ3は、互いに逆位相をもつ出力電圧とな
る。そのため第1インバータ2と第2インバータ3の出力電圧を合成すると、高調波が低
減する。
(もっと読む)
車両の制御装置および制御方法
【課題】故障の早期検出可能性が高まった、車両の制御装置および制御方法を提供する。
【解決手段】制御部は、インバータの電流およびモータのトルクのいずれかが急変した場合に第1のモードから第2のモードに制御を切替える緊急切替条件を制御モードの切替判定基準の一つとして有する。制御部は、インバータのd軸電流およびq軸電流のいずれかに変動が生じているということを含む第1の条件、車輪の速度の変動に基づいて、車輪にスリップが生じているということを示す第2の条件が成立するか否かを判断する。制御部は、第1の条件が成立しかつ第2の条件が成立した場合には、緊急切替条件が成立する頻度がしきい値を超えたときにインバータに故障が発生したと判断する故障検出処理を実行し、第1の条件が成立せずかつ第2の条件が成立した場合には、故障検出処理の実行を停止する。
(もっと読む)
位置決め制御装置
【課題】空調空気を吹き出す回転機構の回転速度制御に、誘導電動機の位相制御を用いても、電源電圧の歪みの影響を受けずに、所望の誘導電動機の回転速度が得られる位置決め制御装置を提供する。
【解決手段】予め減速機構軸3の回転角度に対応させた目標速度を備えた目標速度提示手段と、誘導電動機1を駆動して予め設定された回転パターンの一連の動作をさせたときに、前記角度検出器4の検出した回転角度に対応させて、速度検出器5で検出した回転速度を所定の時間間隔で記憶する記憶手段とを備え、前記制御手段は、次の一連の動作において、前記目標速度と記憶した回転速度とを比較して位相制御回路7への出力を所定の時間間隔ごとに補正して誘導電動機を駆動する。
(もっと読む)
モータ制御装置
【課題】モータ制御装置において、モータの動作制御により、ステータの振動に基づく騒音の発生を抑制する。
【解決手段】 モータ制御装置10は、ロータの回転速度Rを算出する回転速度算出部30と、その回転速度Rと、ステータの固有振動数Fとに基づいて、インバータ20への変調率Dを調整する変調率調整部32とを有する。この構成により、高調波成分の周波数と、ステータが有する固有振動数Fとによる共振現象の発生を防ぎ、ステータの振動に基づく騒音の発生を抑制することができる。
(もっと読む)
電動機のトルク脈動抑制システム
【課題】電動機のトルク脈動を確実に抑制するための補償電流を自動学習によって取得でき、人手による補償電流テーブルの生成作業も大幅に軽減できる。
【解決手段】コントローラ5は、トルク脈動抑制手段とトルク脈動補償電流学習手段とを搭載し、電動機1のトルク脈動周波数成分を軸トルク検出値から抽出してトルク脈動を抑制するための補償電流を学習で求め、この補償電流をインバータ7の電流制御指令に重畳させて周波数成分毎のトルク脈動を抑制する。
このトルク脈動抑制のための補償電流の学習に、複数の異なる動作点で自動的に繰り返し実行し、この学習データを補償電流テーブルとして生成する補償電流テーブル生成手段を備える。
(もっと読む)
誘導モータの制御装置
【課題】 誘導モータの励磁電流とトルク電流を円滑に変更し、任意の出力状態での制御方式の切替えを可能にする誘導モータの制御装置を提供する。
【解決手段】 トルク指令値と誘導モータIMの回転速度とに応じて電流指令値を算出し、算出された電流指令値に対応した三相交流電流で誘導モータを駆動する誘導モータ制御装置であり、与えられたトルク指令値において誘導モータの目標磁束を一定とする電流を演算するベクトル制御電流成分指令演算部11−1と、与えられたトルク指令値において誘導モータの損失を最小とする電流を演算する最大効率制御電流成分指令演算部11−2と、電流指令値の切替え時の電流を演算する制御方式切り替え時電流成分指令演算部11−3と、前記誘導モータに流れる電流を前記電流指令値に追従させるモータ駆動部(12、13、14)と、を備え、前記誘導モータの出力トルクを前記トルク指令値に対応した値とするように制御する。
(もっと読む)
電動機のトルク脈動抑制システム
【課題】電動機のトルク脈動を抑制するための補償電流の学習を簡易にし、この補償電流を基にしたトルク脈動抑制システムの構成を簡単化できる。
【解決手段】電動機の制御装置とは別装置にしたコントローラ5は、補償電流の学習にはトルク脈動抑制手段5Aと補償電流学習手段5Bによって、軸トルク検出値からトルク脈動周波数成分を抽出し、これを基にトルク脈動補償電流を学習してテーブル化する。
トルク脈動抑制時は、補償電流テーブルをインバータ7に実装し、コントローラ5や軸トルク検出器4をシステムから切り離してトルク脈動補償制御を行う。
(もっと読む)
インバータ装置
【課題】各スイッチ素子の電力損失許容量を増大せずに各スイッチ素子の熱破壊を防止する。
【解決手段】このインバータ装置1では、各スイッチ素子Spu,Snu,Spv,Snv,Spw,Snwにおける一定周期Tの電力損失Ppu,Ppv,Ppw,Pnu,Pnv,Pnwと、そのスイッチ素子の電力損失許容量に反比例する補正係数kpu,kpv,kpw,knu,knv,knwの積を電力損失許容度P’pu,P’pv,P’pw,P’nu,P’nv,P’nwとし、制御回路16は、一定周期Tにおいて、各相U,V,Wの前記各スイッチ素子の前記電力損失許容度のうちの最大のものが最も小さくなる様に、前記各相の全ての下アーム素子Snu,Snv,Snwのみがオンになる期間t0と、各相の全ての上アーム素子Spu,Spv,Spwのみがオンになる期間t7との和tzを一定に保って各期間t0,t7の比を調整する。
(もっと読む)
電動機駆動装置及び電動機駆動装置の制御方法ならびに電動装置
【課題】部品点数を減らしつつ、エネルギー変換効率を向上することが可能な電動機駆動装置を提供する。
【解決手段】電動機駆動装置(1、21〜23)は、交流電動機10に印加される電圧を調節することにより交流電動機10を駆動するインバータ3と、交流電動機10の複数のコイルが結線された中性点と、インバータ3の正極側母線または負極側母線との間に直流電圧を印加する直流電源2から供給され、かつインバータ3を経由する電流により充電されるコンデンサ4と、交流電動機10が指定された回転数で回転するように、インバータ3を制御する制御回路7とを有する。そして制御回路7は、交流電動機10に生じる誘起電圧と、直流電源2と、コンデンサ4の電圧との条件により弱め界磁制御と昇圧制御を使い分けてインバータ3を制御する。
(もっと読む)
電力変換装置
【課題】電動機の高速回転駆動及び直流電源の急速充電の少なくとも一方を低コストで実現できる電力変換装置を提供する。
【解決手段】電力変換装置は、電力入力部に入力された電力を直流電力に変換する直流電力変換部を有する第1の直流電源と、該第1の直流電源と並列に接続された第2の直流電源と、直流電力を平滑化する平滑回路と、該平滑回路に接続されて直流電力を多相交流電力に変換して多相交流電動機に供給する電力変換部と、前記第1の直流電源の電力入力部及び前記電力変換部の多相交流出力点間に設けた第1の開閉装置を有する第1の短絡部と、前記第1の直流電源の電力供給部及び電力入力部間と前記電力変換部の多相交流出力点及び前記多相交流電動機間との少なくとも一方に設けた第2の開閉装置を有する第2の短絡部と、前記第1の開閉装置及び第2の開閉装置を、両者の同時閉路状態を防止して開閉制御する開閉制御部とを備えている。
(もっと読む)
車両の走行用モータ制御装置
【課題】レゾルバ等の回転角度センサからの、製造ばらつき等に起因する誤差を含む検出結果を、ハードウェア規模の増大を抑えつつ補正して、モータの制御精度を向上させる。
【解決手段】RD変換部からの、誤差を含むA,B,Z各相信号に対し、排他的論理和演算部41が、A,B各相信号の排他的論理和である実パルスPrを出力する。推定角度パルス信号生成部43は、Z相信号のパルス発生毎に、直前のZ相信号パルスの発生周期とRD変換部の分解能に基づき、以後の回転で分解角回転するのに要する時間を推定し、その推定時間をパルス幅とする推定パルスPpを出力する。推定パルスカウンタ44はその推定パルスPpをカウントして推定カウント値Kpを出力する。補正量計算部45は、実パルスPrの出力タイミング毎に、補正カウンタ46からの補正カウント値Kcが推定カウント値Kpに一致するように補正カウント値Kcをカウントアップ(更新)させる。
(もっと読む)
201 - 220 / 651
[ Back to top ]