
Fターム[5H505LL01]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620)
Fターム[5H505LL01]の下位に属するFターム
アナログ値で検出するもの (110)
デジタル値で検出するもの (278)
速度検出器を用いないで速度を検出するもの (581)
検出器を複数台設けるもの
Fターム[5H505LL01]に分類される特許
141 - 160 / 651
永久磁石同期モータの駆動装置、空気調和装置、換気扇の駆動装置、洗濯機、自動車及び車両
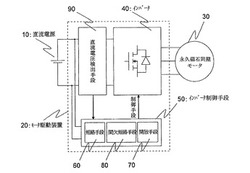
【課題】永久磁石同期モータが強制的に回転させられた場合に生じる回生電圧を部品点数の増加なしに抑制して低コスト化できる永久磁石同期モータの駆動装置、空気調和装置、換気扇の駆動装置、洗濯機、自動車及び車両を得ることを目的とする。
【解決手段】回生運転時に、直流電圧検出手段90が検出した増大する回生電圧に基づいてインバータ40と永久磁石同期モータ30の線間を短絡するようにインバータ40を制御する短絡手段60と、直流電圧検出手段90が検出する減少する回生電圧に基づいてインバータ40と永久磁石同期モータ30の線間を開放するようにインバータ40を制御する開放手段70と、直流電圧検出手段90が検出する増大する回生電圧に基づいてインバータ40と永久磁石同期モータ30の線間を開放と短絡を交互に行うようにインバータ40を制御する間欠短絡手段80と、を備えた。
(もっと読む)
電動機駆動装置

【課題】簡単な構成で確実に可変速運転範囲内の減速時間を短縮する。
【解決手段】2乗トルク特性の機械を駆動する交流電動機2と、これに交流を給電する変換器1と、変換器1のスイッチング素子のゲートにオンオフパルスを供給する制御手段3とで構成する。制御手段3は、速度指令が第1の運転速度から第2の運転速度への減速指令であるとき、所定の減速レートを有する新たな速度指令に変換する速度基準レート手段4と、減速レートを求める減速率演算手段5と、交流電動機2の速度が新たな速度指令に追従するように制御してオンオフパルスを出力する主制御手段6を備える。減速率演算手段5は、交流電動機2をフリーラン減速させたときの減速曲線が、第2の運転速度と交差する点における接線の傾きが前記減速レートとなるように演算する。
(もっと読む)
電力変換器の制御装置
【課題】デッドタイムの補償電圧の振幅を適切にチューニングすることができる電力変換器の制御装置を提供する。
【解決手段】電力変換器から電動機へ供給される電圧が前記電力変換器に設定されたデッドタイムによって歪むことを抑制するための補償電圧を記憶した記憶手段と、電流理想指令に対応した電圧指令に前記補償電圧を合算した合算電圧指令に基づいて前記電力変換器を制御し、前記合算電圧指令に基づいた前記電動機の駆動力に過不足が生じた場合に、前記電力変換器から前記電動機に流れこむ駆動電流の値を調整することにより、前記駆動力を調整する調整手段と、前記駆動電流の値が調整されたときに前記駆動電流上に発生する電流脈動の値と前記電流理想指令との値の差が所定の基準値よりも小さくなるように、前記補償電圧の振幅を補正する補正手段と、を備えた。
(もっと読む)
電力変換装置
【課題】モータに電力を供給する電力変換装置において、入力力率の改善を図る。
【解決手段】インバータ回路(4)でのスイッチングを制御する制御部(5)に、モータ(7)(例えばIPMモータ)の速度を制御する操作量を求める速度制御部(50)を設ける。また、インバータ回路(4)の出力電力(pinv)を制御する操作量を求める電力制御部(51)を設ける。また、モータ電流(id,iq)を制御する操作量を求める電流制御部(52)(例えばq軸電流制御部)を設ける。そして、速度制御部(50)、電力制御部(51)、及び電流制御部(52)を組み合わせて、モータ電流(id,iq)とインバータ回路(4)の出力電圧指令値(vd*,vq*)(例えばq軸電圧指令値)とから求めた出力電力(pinv)を、入力交流の電源周波数(ωs)の2倍に同期させる。
(もっと読む)
モータ駆動制御装置
【課題】鎖交磁束の波形に含まれる高調波成分の影響を除去してトルクリプルを抑制できるモータ駆動制御装置を提供する。
【解決手段】モータ駆動制御装置において、回転子の角度検出値に基づいて変化するd軸交流信号をコイルに流すd軸電流の目標値であるd軸電流目標値に加算し、前記角度検出値に基づいて変化しd軸交流信号に対して1/4周期の位相差をもつq軸交流信号をコイルに流すq軸電流の目標値であるq軸電流目標値に加算する加算手段を有する。そして、d軸交流信号が加算されたd軸電流目標値に追従するようにd軸電流を制御し、q軸交流信号が加算されたq軸電流目標値に追従するようにq軸電流を制御する。
(もっと読む)
インバータ装置
【課題】回生エネルギーからインバータ主回路を保護することができるインバータ装置を提供する。
【解決手段】電圧制御回路は、交流電動機4駆動するインバータ部に出力させる電圧の指令値Vcをアナログ的に演算し、減速制御手段は、交流電動機の減速を開始させた直後に、前記指令値Vcを、減速を開始させる直前の状態で与えられていた第1指令値よりも高い第2指令値に一時的に上昇させてから、第1指令値よりも高く第2指令値よりも低い第3指令値に低下させるように制御する。
(もっと読む)
電気車制御装置
【課題】 速度センサレス制御において、電動機が極低速で回転している場合でも、電動機を制御するためのインバータを安定して始動することのできる電気車制御装置を提供することにある。
【解決手段】 速度センサレス制御を適用した電気車制御装置10であって、速度計11から極性のない速度情報Vを受信し、運転台9から前進/後進信号SDを受信し、速度情報V及び前進/後進信号SDに基づいて、極性付き速度情報VPを演算し、極性付き速度情報VPに基づいて、インバータ1の起動時を制御する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】多相モータの各相の電流の位相遅れをそれぞれ補正するモータ制御装置を提供することである。
【解決手段】多相モータに接続され、直流電力を交流電力に変換する電力変換手段と、多相モータの少なくとも2相の相電流をそれぞれ検出する複数の電流検出手段と、多相モータの各相の相電流の位相遅れ量をそれぞれ設定する位相遅れ量設定手段と、複数の電流検出手段により検出された2相の相電流を含む、前記各相の固定座標系の相電流を回転座標系の電流に変換する座標変換手段と、座標変換手段により変換された回転座標系の電流と、外部から入力される多相モータの出力目標値に基づいて、電力変換手段を制御する制御手段とを備え、座標変換手段は、位相遅れ量設定手段により設定された各相の位相遅れ量に基づき各相に対応する複数の補正値を設定し、複数の補正値を用いて固定座標系の相電流を回転座標系の電流に変換する。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走した軸とは異なる軸における空転滑走の誘発を適切に抑制させるための新たな方策を提案すること。
【解決手段】係数Kは、他軸において空転滑走の発生が検知されていない場合にはK=1とされ、検知された場合には、検知されてから時間Tpが経過するまでの制御パラメータ値変更期間Ppの間、K算出部51で算出された値とされる。この切り替えは、タイマー切替器53が行う。K算出部51は、他軸から入力される他軸情報に基づいて、他軸において空転滑走の発生が検知されたか否かを判定し、検知された軸がある場合にはその空転滑走軸と自軸との位置関係に基づいて係数Kを決定する。また、制御パラメータ値変更期間Ppの間、タイマー切替器54によって引き下げ制御値も変更される。他軸において空転滑走の発生が検知されていない場合には制御パラメータ標準値が選択され、制御パラメータ値変更期間Ppの間は制御パラメータ臨時値が選択される。
(もっと読む)
モータ駆動装置及びインバータ制御装置
【課題】パワートランジスタが不飽和領域で動作することを回避しながら、インバータの出力波形の歪みを低減させるためのモータ駆動技術を提供する。
【解決手段】モータ駆動装置1が、モータ2とインバータ3とインバータコントローラ6とを備えている。インバータコントローラ6は、外部から与えられる外部指令に応じて電圧指令値を生成し、電圧指令値からデューティを決定し、デューティに応答してPWM(pulse width modulation)制御をおこなってインバータ3のパワートランジスタ群を制御する。インバータコントローラ6は、電圧指令値が所定の電圧値V3より大きく電圧値V4より小さい場合、電圧指令値の増加と共にデューティを増加させ、電圧指令値が第2電圧値V4より大きく電圧値V5より小さい場合、デューティを第1固定値に設定し、電圧指令値が電圧値V5より大きく電圧値V6より小さい場合、電圧指令値の増加と共にデューティを増加させる。
(もっと読む)
電力変換システム
【課題】多相かつ個々の相が複数のレグを備える構成において、リップル電流の低減を図る。
【解決手段】制御装置30は、相毎に1制御周期における前記各レグのデューティ比指令をそれぞれ演算し、そして、演算されたデューティ比指令の位相を変更する。この場合、制御装置30は、1制御周期において第1のレグを流れる正のパルス電流と、第2のレグを流れる負のパルス電流とがタイミング的に重複するように、第1のレグまたは第2のレグのデューティ比指令の位相を変更している。
(もっと読む)
電動機の速度制御装置及び速度制御方法
【課題】目標値応答と外乱応答を個別に最適化可能な電動機の速度制御装置を提供する。
【解決手段】速度制御手段を、速度指令と速度帰還の偏差に積分ゲインGIを乗算して積分する積分増幅器221と、速度指令を共通の入力とし、比例ゲインGF1を有する不完全微分器の出力及び比例ゲインGF2を有する1次遅れ演算器の出力を加算して出力するフィードフォワード補償器224と、積分増幅器221の出力から速度帰還を減算すると共に、フィードフォワード補償器224の出力を加算する加減算器222と、この出力にゲイン調整パラメータGPを乗算してトルク指令を得る比例増幅器223とで構成する。速度指令応答時定数をτr、トルク外乱応答時定数をτd、電動機を含む負荷慣性モーメントをJとしたとき、G1=1/τd、GP=σr×J、GF1=1/(σr×τr)、GF2=1−τr/τdを満たすようにする。
(もっと読む)
巻線形誘導機の始動制御方法及び始動制御装置
【課題】巻線形誘導機の始動トルクを改善し、装置全体の小型軽量化、低コスト化を可能にした始動制御方法及び始動制御装置を提供する。
【解決手段】第1の電源系統21、低圧の第2の電源系統22に接続された第1,第2の開閉手段31,32をオフして固定子巻線11を開放した状態で電力変換器34により回転子巻線12に電圧を印加し、固定子巻線11の誘起電圧と電源系統22の電圧とを同期させてから開閉手段32をオンして電源系統22を固定子巻線11に接続する第1の同期投入モードと、電力変換器により誘導機10を所定速度まで加速し、その後、開閉手段32をオフして固定子巻線11を開放する第1の加速モードと、固定子巻線11の誘起電圧と電源系統21の電圧とを同期させてから開閉手段31をオンして電源系統21を固定子巻線11に接続する第2の同期投入モードと、を順次実行して誘導機10を始動する。
(もっと読む)
モータ制御装置
【課題】電源電圧が変動する場合であっても回転数により変化する誘起電圧が電源電圧を超えて制御破綻に至ることを的確に防止する。
【解決手段】誘起電圧を抑える方向に作用する抑制電流成分がベクトルの向きに応じて変化する電流指令ベクトルAを用いてモータの駆動を制御する。或る回転数N1の下に所望のトルクT1を発生させ得る複数の電流指令ベクトルA1〜A4に関する情報と各々の電流指令ベクトルA1〜A4の向きに応じた抑制電流成分によって抑制された後の誘起電圧V1〜V4とを回転数毎に関連付けた誘起電圧情報を実測値に基づき予め設定する。そして、誘起電圧情報において現回転数N1と外部から指示されたトルク指令T1とに関連づけられている複数の電流指令ベクトルA1〜A4のうち、誘起電圧を現電源電圧Vbatよりも小さくする方向に抑制する電流指令ベクトルA3、A4を求めて、求めた電流指令ベクトルによってモータを駆動制御する。
(もっと読む)
車両用制御装置
【課題】誘導電動機に供給される電圧と電流から誘導電動機の加速度を演算して、車輪の空転を抑えながら加速する場合、低速度域において、空転の誤検知が発生して必要以上にトルクを引き下げるという問題点がある。
【解決手段】検出速度が設定値Aより小さい場合は検出速度を選択し、設定値Bより大きい場合は演算速度を選択し、設定値Aより大きく設定値Bより小さい場合は重み付けして速度を出力する速度選択部を備える。一次角周波数ωが0に近いときは検出速度から加速度を演算し、一次角周波数ωが大きいときは演算速度から加速度を演算することができるため、全速度域で空転検知ができる。
(もっと読む)
モータ制御装置
【課題】制御系が定常状態でない場合に誘起電圧や電源電圧の未知なる変動によって制御系が不安定になることや電源電圧を誘起電圧が越えて制御破綻に至ることを的確に防止するとともに、高効率化の追求に適したモータ制御装置を提供する。
【解決手段】定常状態の場合は、電流指令ベクトルのうちトルク指令Trefに関連付けられた電流指令ベクトルを用いる定常制御モードを実行する。そして、誘起電圧又は電源電圧の変動に対応する変動情報を取得し、取得した変動情報に基づいて制御系が定常状態であるか否かを判定し、定常状態でないと判定した場合には、非定常制御モードに移行して、誘起電圧を抑制する抑制電流成分が増大する方向に電流指令ベクトルを補正して、補正した電流指令ベクトルを用いて制御を行う。
(もっと読む)
電力変換システムおよび電力変換装置
【課題】更なる信頼性向上を図れる電力変換システムおよび電力変換装置を提供する。
【解決手段】本発明に係る電力変換システムは、モータと、U相電流,V相電流、及びW相電流を前記モータに出力するインバータ回路と、前記U相電流,前記V相電流、及び前記W相電流を検出する電流センサと、トルク指令値及び前記電流センサによって検出された検出値に基づいて、前記インバータ回路から出力される前記U相電流,前記V相電流、及び前記W相電流が正弦波状になるように当該インバータ回路を制御する制御回路と、を備え、前記制御回路は、前記電流センサの検出値に基づいて前記U相電流,前記V相電流、及び前記W相電流に重畳された電流成分を相毎に抽出する電流成分演算部と、前記U相電流,前記V相電流、及び前記W相電流のうち、いずれか2相の前記電流成分の位相に基づいて前記モータに通電される交流電流の異常を検出する交流電流異常検出部を有する。
(もっと読む)
モータ制御装置及び異常検出方法
【課題】モータ制御の異常を短時間で検出し、モータの暴走を防止する。
【解決手段】異常検出器10は、微分器106から速度ωを入力すると共に、速度制御器103からトルク指令T*を入力し、速度ωを時間微分して加速度ω’(回転加速度)を算出し、トルク指令T*と加速度ω’×JBARとの間の差分の絶対値を算出し、差分の絶対値が定格トルクの100%の値以上の場合に異常を検出し、異常信号をインバータ104に出力する。これにより、モータ113が暴走する状態を判定することができ、異常信号により、インバータ104の運転を停止することができる。異常は、モータ113が高速回転する前の低速回転の状態で検出され、短時間でインバータ104の運転が停止されるから、モータ113が暴走することによって生じるモータ113及び制御対象である機械への悪影響を軽減することができ、安全性を確保することができる。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御を行なうものにあって、モデル誤差によって制御量の制御性が低下することを抑制する。
【解決手段】電気角速度ωが閾値速度ωF以上であることを条件に(ステップS32:YES)、q軸の予測電流と実際の電流との誤差(予測誤差Δiq)をゼロにフィードバック制御すべくd軸インダクタンスLdを操作する(ステップS34)。また、d軸の予測電流と実際の電流との誤差(予測誤差Δid)をゼロにフィードバック制御すべくq軸インダクタンスLqを操作する(ステップS36)。そして、予測誤差Δid,iqがゼロとなった際のd軸インダクタンスLdやq軸インダクタンスLqを学習値として記憶する(ステップS38)。
(もっと読む)
モータ制御装置およびモータ駆動システム
【課題】確実に安定した電流値を検出して安定したモータ制御を実行することが可能なモータ制御装置を提供する。
【解決手段】モータ回転数指令を確認する(ステップS2)。モータ回転数指令が所定回転数以上であるかどうかを判断する(ステップS4)。ステップS4において、モータ回転数指令が所定回転数以上であると判断した場合(ステップS4においてYES)には、電流を検出する期間(電流検出期間)を所定期間に設定する(ステップS6)。モータ回転数が所定回転数未満であると判断した場合(ステップS4においてNO)には、電流を検出する期間(電流検出期間)を全期間に設定する(ステップS8)。
(もっと読む)
141 - 160 / 651
[ Back to top ]