
Fターム[5H505LL39]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 位相 (280)
Fターム[5H505LL39]に分類される特許
1 - 20 / 280
電動機駆動システム及び電動機駆動方法
線電流検出装置および電力変換システム
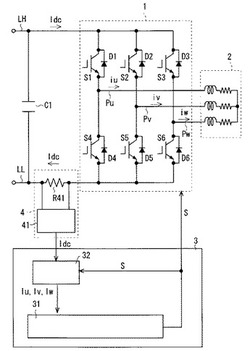
【課題】たとえスイッチングパターンが長期間に渡って維持されるとしても、線電流を得ることができる線電流検出装置を提供する。
【解決手段】スイッチング制御部31はスイッチング素子S1〜S6のスイッチングパターンを制御して相電圧を交流線Pu,Pv,Pwに印加させる。相電圧は交流の1周期において略1パルス波形を有する。電流検出部4は直流線LH,LLを流れる直流電流Idcを検出する。線電流取得部32はスイッチングパターンが変化する第1タイミングの前の第1時点において検出された直流電流Idcを第1時点でのスイッチングパターンによって決定される第1相の線電流として推定し、第1タイミングの後の第2時点において検出された直流電流Idcを第2時点でのスイッチングパターンによって決定される第2相の線電流として推定する。
(もっと読む)
電力変換装置、電動機駆動装置及び空気調和機

【課題】PWM制御時のスイッチング損失を低減させ、高効率な電力変換装置,電動機駆動装置および空気調和機を提供する。
【解決手段】電力変換回路4は、パルス制御部7から出力されたパルス信号7Aによるスイッチング動作によってPWM制御を行い、交流電動機3へ交流電力を出力している。このとき、ベクトル制御部8が、相電流検出部6からの相電流情報6Aに基づいて算出した電流の位相情報8Aをパルス停止制御部9へ出力する。パルス停止制御部9は、電流の位相情報8Aに基づいて生成した相パルス停止制御信号9Aをパルス幅判定部12へ出力する。パルス幅判定部12は、パルス幅が一定の値以下とならないパルス起動/停止指令12Aをパルス制御部7へ出力する。これにより、パルス制御部7は、電力変換回路4の所定の相の電流位相のゼロクロスを基準として所定の区間のパルス信号7Aを停止する。
(もっと読む)
線電流検出装置および電力変換システム
【課題】誤差を低減して線電流を得ることができる線電流検出装置を提供する。
【解決手段】二相線電流取得部33は、スイッチング素子S1〜S6のスイッチングパターンが変化するタイミングよりも前又は後の第1時点において検出された直流電流を、第1時点でのスイッチングパターンによって決定される第1相の線電流として推定し、当該タイミングに対して第1時点とは反対側であって前記第1時点との差が第1時間である第2時点において検出された直流電流を、第2時点でのスイッチングパターンによって決定される第2相の線電流として推定する。線電流補正部34は、第1相の線電流を補正して第3時点における第1相の線電流と、第3時点との差が第1時間よりも短い第2時間である第4の時点における第2相の線電流とを出力し、第1相の線電流のみを補正するときには第4時点として第2時点が採用される。
(もっと読む)
モータ制御装置
【課題】 少ないメモリ容量のトルク補正データで、負荷トルク変動および発生トルク変動を抑制するとともに、モータをより平滑に駆動し、モータを内蔵した圧縮機の振動および騒音を抑制することができるモータ制御装置を提供する。
【解決手段】 補正データ作成部21は、回転位置検出部19によって更新された回転位置情報に基づいて、補正用正弦波データテーブル20から、負荷トルク変動補正データとと発生トルク変動補正データとを読み出し、読み出した発生トルク変動補正データをトルク定数の周期変動成分kとする。そして、トルク定数の周期変動成分kから、発生トルク変動補正データicを求め、負荷トルク変動補正データiと発生トルク変動補正データicとを合算し、合算したトルク変動補正データをPWM作成部18に送る。
(もっと読む)
電力変換装置
【課題】エンジン発電機による電動機駆動システムにおいて、電力変換器の高調波や直流電圧変動の影響によって、d軸とq軸の電圧外乱による電流脈動の強めあい現象により軸振動が増加し、dq軸間干渉の影響により振動やd軸電流が増加する恐れがある。
【解決手段】エンジン発電機システムの電力変換器105において、発電機104の回転子磁束方向のd軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにd軸電圧調整手段117により発電機104を制御するためのd軸電圧Vd*をΔVd*調整し、さらに、q軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにq軸電圧調整手段118によりq軸の電圧Vq*をΔVq*調整する。
(もっと読む)
同期機制御装置
【課題】同期機や電力変換手段等の状態に応じて、適切な運転目標指令を生成し、運転目標を満足する制御指令を生成する。
【解決手段】トルク指令と回転速度と運転目標指令とに基づいて、電機子鎖交磁束指令とトルク電流指令を生成する制御指令生成器10を、トルク指令またはトルク電流指令に基づき第1の磁束指令を生成する第1の磁束指令生成器21と、トルク指令またはトルク電流指令と同期機1の回転速度とに基づき第2の磁束指令を生成する第2の磁束指令生成器22と、運転目標指令に基づき第1および第2の磁束指令の2つの磁束指令の配分比に相当する配分係数を設定する指令配分設定器23と、2つの磁束指令と配分係数に基づき電機子鎖交磁束指令を出力する磁束指令調整器24と、トルク指令と電機子鎖交磁束指令とに基づきトルク電流指令を生成するトルク電流指令生成器25により構成する。
(もっと読む)
電力変換装置
【課題】電力変換装置において、直流リンク電圧の脈動に起因して生ずるモータの振動や騒音を抑制する。
【解決手段】脈動成分を有する直流リンク電圧(vdc)を交流に変換して永久磁石同期電動機(7)に出力するインバータ回路(4)を設ける。ベクトル制御によってインバータ回路(4)を制御し、基本電圧ベクトルがゼロベクトル(モータ端子電圧がゼロとなる電圧ベクトル)を含まない制御状態においては、脈動に応じて永久磁石同期電動機(7)のd軸電圧ベクトルとq軸電圧ベクトルの2つの電圧ベクトルの合成電圧ベクトル(V0)のq軸から見た位相を脈動させる制御部(5)を設ける。
(もっと読む)
電動機の制御データ更新方法と制御装置
【課題】電動機の個体差に応じてマップのデータを最適化できるようにする。
【解決手段】トルクと駆動電流及び電流位相角との関係を示すマップを参照して、目標トルクが出力されるように同期電動機の駆動装置を制御しつつ(S1)、当該同期電動機の出力軸に取り付けたトルク測定器で実トルクを測定する(S2)。この実トルクの測定結果に基づいて、目標トルクが出力されているか否か判断し(S3)、目標トルクが出力されていない場合に、現在の駆動電流の電流位相角を変更してトルク測定器で実トルクを測定することにより、当該測定トルクが最適値になる電流位相角を決定し(S4〜S6)、この決定した電流位相角に基づいてマップを更新する(S7)、電動機の制御データ更新方法を提案する。
(もっと読む)
車両
【課題】レゾルバを用いて検出された回転角に含まれる誤差を適切に補正する。
【解決手段】制御装置40は、レゾルバからの電気信号をレゾルバ−デジタル変換回路で変換して得られるレゾルバ検出角θorgを用いてモータの理想回転角θ0を設定し、理想回転角θ0とレゾルバ検出角θorgとの差分の波形を誤差学習値θeとして記憶する(43)。さらに、制御装置40は、実際のモータ回転速度Nmに対応する位相遅れ時間Tpを算出し(45)、位相遅れ時間Tp分だけレゾルバ検出角θorgを理想回転角θ0に沿って変位させた波形を用いて基準信号Kのずれ時間ΔTnmを算出し(46)、ずれ時間ΔTnmから真の回転角と理想回転角θ0とのオフセット量θofsを算出する(47)。制御装置40は、誤差学習値θeおよびオフセット量θofsを用いてレゾルバ検出角θorgを補正する(48)。
(もっと読む)
回転電機の制御装置および制御方法
【課題】総磁束制御の信頼性の低下を防止することができる回転電機の制御装置を得る。
【解決手段】トルク指令とマップ制御指令との関係が記された3次元マップ11を用いて、トルク指令からマップ制御指令を生成するマップ制御電流指令生成部10と、トルク指令と回転電機の回転速度および電機子電流とから、総磁束制御指令を生成する総磁束制御電流指令生成部20と、マップ制御指令と総磁束制御指令との少なくとも位相および大きさの何れか一方を比較し、総磁束制御指令の位相または大きさが、マップ制御指令を基準として所定の範囲を超えた場合に、マップ制御指令を駆動指令として出力するとともに、総磁束制御指令の位相または大きさが、マップ制御指令を基準として所定の範囲内にある場合に、総磁束制御指令を駆動指令として出力する電流指令判定部30とを備えたものである。
(もっと読む)
電力変換装置
【課題】交流一周期に出力するPWMパルス数の減少による、基本波成分における電圧出力誤差拡大の影響を回避する。
【解決手段】べクトル切り替え位相角およびゼロ電圧ベクトル出力角度幅を、ベクトル切り替え位相角を電圧位相角とする第一の複素ベクトルと、ゼロ電圧ベクトル出力角に応じた位相角に2/3πの位相遅れおよび位相進み処理を行った第二、第三の複素ベクトルの三種類のベクトルの合成ベクトルが、虚数成分が0、且つ、実数成分が前記電圧指令値の振幅に比例した値となるよう決定する。
(もっと読む)
鞍乗型車両
【課題】インバータの大型化を抑えつつインバータの故障を防止できかつモータの巻線を円滑に切り替えることができる、乗り心地の良い鞍乗型車両を提供する。
【解決手段】自動二輪車10は、切り替え可能な巻線を有するモータ18と、アクセルグリップ22と、アクセルグリップ22からの指示に基づいて制御信号を出力する制御部20と、制御部20からの制御信号に基づいてモータ18に出力電圧を供給するインバータ14と、巻線を切り替えるスイッチ16a〜16cと、モータ電流を検出する電流センサ24a,24bと、モータ18の位相を検出するエンコーダ26とを備える。制御部20は、巻線の切り替え条件が成立したとき、アクセルグリップ22からの指示に係わらずモータ電流が0になるように、モータ電流とモータ18の位相とに基づいてインバータ14のデューティー比を調整する。デューティー比調整期間中に巻線を切り替える。
(もっと読む)
モータ制御装置
【課題】トルク応答性の遅れを抑制するモータ制御装置を提供する。
【解決手段】モータ10の回転速度を検出するモータ回転速度検出手段と、外部から入力されるトルク指令値及び前記回転速度に基づき、所定の上限電流値の範囲内である、第1の励磁電流指令値及びトルク電流指令値をそれぞれ演算する電流指令値演算手段と、前記第1の励磁電流指令値の位相を進めて第2の励磁電流指令値を演算することで、前記モータのロータ磁束の遅れを補償する補償手段と、前記上限電流値及び前記トルク電流指令値に基づいて、前記励磁電流指令値の上限値である上限励磁電流指令値を演算する上限励磁電流指令値演算手段と、前記第2の励磁電流指令値を、前記上限励磁電流指令値以下に制限することで、第3の励磁電流指令値を演算する励磁電流指令値制限手段と、前記第3の励磁電流指令値及び前記トルク電流指令値に基づいて前記モータを制御するモータ制御手段と、を備える。
(もっと読む)
回転機の制御装置
【課題】スイッチング素子の温度が過度に上昇することに起因してスイッチング素子の信頼性が低下することを好適に回避することのできる回転機の制御装置を提供する。
【解決手段】スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、スイッチング素子温度Tthが高いほど、モータジェネレータの指令トルクTrq*を低下させる。そして、低下させた指令トルクTrq*を1次遅れフィルタに入力する。ここでは、スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、1次遅れフィルタの時定数Tsを小さく設定する。そして、1次遅れフィルタから出力される指令トルクTrqcに基づき、モータジェネレータの電流フィードバック制御を行う。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
モータ制御装置
【課題】モータ定数の設定誤差も含めて補償して、高精度なトルク制御が可能なモータ制御装置を提供することにある。
【解決手段】モータ制御装置100は、モータMOTに対するトルク指令値から求められた電流指令値が、モータMOTに電力変換器INVを介して供給される電流に対する電流検出値に一致するように、モータに供給される電流を制御する制御部を有する。制御部は、モータが出力するトルクを推定し、推定されたモータのトルク推定値が、トルク指令値に一致するようにモータに供給される電流を制御する。トルク推定演算部20は、モータが出力するトルクを推定する。位相誤差指令演算部25は、トルク推定値とトルク指令値との偏差から、位相誤差の指令値を算出する。速度推定演算部50は、位相誤差の指令値に、位相誤差推定値が一致するように、速度推定値を出力する。
(もっと読む)
モータ制御装置
【課題】電流指令値が0(モータ停止)の場合に、出力電流ノイズに起因するモータの振動を抑制する。
【解決手段】モータに流れる電流値とモータの電気角と電流指令値とが入力され、それら電流指令値、電流値及び電気角を用いたフィードバック制御を行うことにより電圧指令値を算出し、その電圧指令値をPWM波形に変換してモータを駆動するインバータを制御するモータ制御信号を生成するモータ制御装置において、電流指令値が0か否かを検知する0指令検知部61を備え、0指令検知部61が0を検知した時、電圧指令値が入力されてモータ制御信号を生成するPWM変換部18’における電圧指令値に対する分解能を粗くする。
(もっと読む)
同期電動機駆動装置及び同期電動機制御装置
【課題】トルク脈動を低減しつつ、トルクが減少してしまうのを抑えて、高トルクかつ低トルク脈動が得られる同期電動機駆動装置を提供することを目的とする。
【解決手段】同期電動機駆動装置において、独立した3系統の3相固定子巻線が電気角で等間隔ずれて配された同期電動機を駆動する際、3相交流に係る電気角で60度幅の区間それぞれについて、3系統の3相固定子巻線それぞれに接続された3個の3相インバータが順に3相交流電源を20deg幅の区間だけ供給する。
(もっと読む)
1 - 20 / 280
[ Back to top ]