
Fターム[5H530AA01]の内容
Fターム[5H530AA01]の下位に属するFターム
Fターム[5H530AA01]に分類される特許
1 - 20 / 58
不感帯処理部を備えた電動機の制御装置
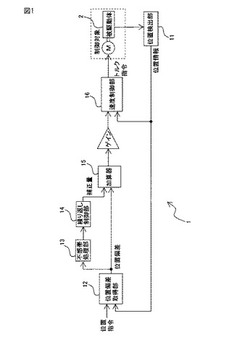
【課題】被駆動体を電動機によって同一動作パターンの繰り返し制御を行う場合において、被駆動体を停止させるために電動機の位置指令をゼロにしたときに発生し得る被駆動体の振動を抑制することができる電動機の制御装置を実現する。
【解決手段】電動機Mの制御装置1は、被駆動体2の位置を検出する位置検出部11と、電動機Mに与えられる位置指令と位置検出部11で検出した被駆動体2の位置との位置偏差をサンプリング周期毎に取得する位置偏差取得部12と、位置偏差取得部12により取得した位置偏差が所定の不感帯範囲内に含まれる場合は当該位置偏差をゼロに置き換えて出力する不感帯処理部13と、不感帯処理部13から出力された位置偏差がゼロになるような補正量を算出する繰り返し制御部14とを備え、位置偏差取得部12により取得した位置偏差と繰り返し制御部14により算出された補正量とに基づいて、電動機Mを制御する。
(もっと読む)
モータ制御装置及び画像形成装置

【課題】高速且つ高精度に、駆動対象を目標停止位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を、駆動初期において実行する。一方、駆動対象の現動作状態に基づき、第二制御処理に対応するパターンで駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pn=Pc+Pdを算出する。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で、第一制御処理に代えて第二制御処理を実行する。この動作により、第一制御処理を長めに実行して駆動対象を高速に搬送し、第二制御処理では、上記パターンに対応する目標軌跡に追従するように駆動対象の位置P及び速度Vを制御して、駆動対象を精度よく目標停止位置で停止させる。目標軌跡は、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定されてなる。
(もっと読む)
指針型表示器のモータ制御装置
【課題】機械式のアナログ式表示器に用いられ、指針を滑らかに移動させることによって見た目に違和感のない指針型表示器を実現するモータ制御装置を提供する。
【解決手段】モータ駆動制御部11は、所定時間毎に順次入力されるデータDaをデータ受信部10が複数受信すると、受信した複数のデータDaのうち少なくとも最初に受信したデータDaと最後に受信したデータDaから指針の回転量を算出するとともに、最初のデータDaを受信してから最後のデータDaを受信するまでの時間を指針の移動時間に設定する。またモータ駆動制御部11は、上記移動時間で上記回転量だけ指針を連続的に回転させる回転速度であって、上記移動時間の中間期間に比べて上記移動期間の開始期間及び終了期間が低速となる回転速度を算出し、指針が上記回転速度で回転するようにモータ駆動部12を制御する。
(もっと読む)
部品実装機
【課題】装備されているモータが減速停止するときに生じる回生電力を有効利用して従来よりも消費電力を削減した部品実装機を提供する。
【解決手段】部品採取部材と基台との間に移動可能に介在されそれぞれモータ4X、4Zによって駆動される複数の移動部材2X、2Zを備え、部品採取部材が部品を採取および実装する部品実装機1において、各モータ3X、3Zが減速するときに運動エネルギを回生して生じた回生電力PR1〜PR3を制御する回生電力制御部6と、回生電力制御部6と電力をやりとりする各モータの電源部5X、5Zと、2つの移動部材2X、2Zが移動する場合に、一方の移動部材の減速停止の開始タイミングまたは減速停止中の所定タイミングに同期して他方の移動部材の始動加速を開始させ、一方のモータから得られる回生電力PR2を他方のモータの起動に利用する(駆動電力PZ)ように回生電力制御部6を制御する制御部7と、を備える。
(もっと読む)
モータ駆動システム及びモータ制御装置
【課題】多様なシステム構成の産業機械に汎用的に対応して安全規格の準拠を容易に確保可能にする。
【解決手段】モータ制御装置13とセーフティモジュール14は、所定の駆動制御指令に従ってモータ2への給電制御を行うモータ制御回路部31と、安全要求信号が入力された際に、コントローラ11から入力された所定の上位制御用動作パターンに沿った上位制御指令を駆動制御指令としてモータ制御回路部31に入力してモータ2の減速・停止を行うコントローラ減速モード、又は、所定の自己制御用動作パターンに沿ってモータ制御装置13内で生成した内部減速指令を駆動制御指令としてモータ制御回路部31に入力してモータ2の減速・停止を行うアクティブ減速モード、のいずれか一方を選択して実行する機能と、安全要求信号が入力された際に、駆動状態量が所定の動作監視パターンを超過したか否かを監視する比較監視部41と、を備えている。
(もっと読む)
モータの制御方法及び装置
【課題】 モータの出力をできるだけ大きなトルクで減速し、しかも、位置決め時のオーバーシュートが小さく、高速に位置決めできる定位置停止制御装置を実現する。
【解決手段】 モータMの回転子の回転速度がオリエンテーション速度になった後、制御部7は、位置ループ速度指令vcにより指令された速度と2乗速度v2との偏差を速度制御器4に与える。速度制御器4から出力されたトルク指令tcに、制御部7が決定したトルク加算指令acを加算部ADで加算して得た加算トルク指令atcをトルク制御器6に与える。オリエンテーション制御に用いる物理変数を用いて定めたスライディングカーブに沿って回転子の位置及び速度を制御することにより、回転子を目標位置に停止させるスライディングモード制御によりトルク制御器の入力を調整する。
(もっと読む)
ファンモータ制御装置
【課題】簡単な回路構成でありながら、電源が切断されたときに、ファンモータの駆動回路に過大な電流を流さずに迅速にファンモータの回転を停止することが可能なファンモータ制御装置を提供する。
【解決手段】制動回路部2は、電源電圧が第1の閾値以下になったときに第1の制動信号を駆動制御部12に出力する第1の制動回路3と、電源電圧が第1の閾値よりも低い第2の閾値以下になったときに第2の制動信号を駆動制御部12に出力する第2の制動回路4とを備えた。
(もっと読む)
画像形成装置、サーボ制御装置、プログラム
【課題】キャリッジを駆動するときに目標停止位置に求められる最も高い停止位置精度が得られるサーボ制御終了タイミングでサーボ制御を終了しているために停止までの時間がかかる。
【解決手段】キャリッジ3を駆動するとき、当該駆動の目標停止位置に求められる停止位置精度を判別し、停止位置精度が高いときには、サーボ制御を終了タイミング1で終了し、停止位置精度が中のときには、サーボ制御を終了タイミング2で終了し、停止位置精度が低いときには、サーボ制御を終了タイミング3で終了する。
(もっと読む)
モータ制御装置
【課題】フェール時に短絡用スイッチング素子を保護して確実にフェール動作を行うことが可能なモータ駆動回路を提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段は、フェール時に電源スイッチ8を開くとともに短絡用スイッチング素子10を閉動作させるモータ制御装置1において、フェール時に、電源スイッチ8の開動作に遅延させて短絡用スイッチング素子10を閉動作させるとともに、少なくとも電源スイッチ8が開動作してから短絡用スイッチング素子10を閉動作するまでにモータMを界磁制御することを特徴とする。
(もっと読む)
エレベータの制動制御装置
【課題】エレベータの非常制動時、エレベータの運行状態に応じて最適な制動時間となる放電抵抗を設定することにある。
【解決手段】制動装置26の制動装置コイル26aに並列接続可能な抵抗値の異なる複数の放電抵抗32a,32b,32cと、乗りかご14の速度を検出する速度検出手段7と、乗りかご14の荷重を検出する荷重検出手段6と、かご速度とかご荷重と予め設定されるエレベータのパラメータ及び制動距離とから制動装置26の動作時間を算出する動作時間算出手段34と、この動作時間に基づいて、前記複数の放電抵抗から1つの放電抵抗を選択する抵抗選択信号を生成する放電抵抗選択手段35とを備え、非常制動時、前記抵抗選択信号のもとに、1つの放電抵抗を選択し、制動装置コイル26aに並列に接続するエレベータの制動制御装置である。
(もっと読む)
故障予知装置及び故障予知方法並びに検査装置
【課題】障害の発生を未然に防いで検査作業の効率化を図る。
【解決手段】故障の発生を予知する故障予知装置において、装置に組み込まされた駆動モータのトルクを検出するトルク検出手段と、当該トルク検出手段で検出したトルクの変動を監視する監視手段と、当該監視手段で監視するトルクが設定基準値の範囲外にあるとき、前記駆動モータの停止、異常メッセージ表示又は警告のいずれか1又は複数を行うことを特徴とする制御部とを備えた。故障予知方法は、前記故障予知装置の処理機能と同様の構成を有する。また、検査装置には、前記故障予知装置の機能を組み込んだ。
(もっと読む)
液体吐出装置
【課題】省電力化を図る。
【解決手段】液体を吐出するヘッドと、前記ヘッドを移動方向に移動させるキャリッジと、前記キャリッジに設けられた発電機であって、キャリッジの移動を停止させるときの制動エネルギーで発電を行う発電機と、を備える。
(もっと読む)
駆動装置
【課題】負荷ピークおよびその結果起こり得る損傷から駆動装置の個別部材を守ることができる、低コストかつ単純構造を有する駆動装置、特に自動車ハッチ用の駆動装置を提供する。
【解決手段】ベース部(1)又は可動構造部(3)と結合できるケースパイプ(7)と、可動構造部(3)又はベース部(1)と結合できる保護パイプ(14)と、ねじ付きスピンドル(33)およびねじ付きスピンドル(33)に嵌着されたスピンドルナット(45)を備えると共にケースパイプ(7)および保護パイプ(14)を互いに軸方向に相対運動可能にするスピンドル駆動装置と、スピンドル駆動装置を回転自在に駆動する少なくとも1つの電動モータ(19)を含む回転駆動体(18)と、を備えた駆動装置は、回転駆動体(18)が非作動状態の時に駆動装置(5)に外から持ち込まれた外部力により回転駆動体(18)に制動作用を加える安全回路(28、28’、28’’、28’’’)を含む。
(もっと読む)
アクチュエータ制御装置
【課題】ストッパにより駆動軸の回転を強制的に停止する構造のアクチュエータにおいて、各部品の強度を特別に向上させずに駆動トルクの上限を高めても各部品にクリープ現象が起こりにくくして、アクチュエータが作動不良を起こさないようにする。
【解決手段】アクチュエータ制御装置は、駆動軸の回転を強制的に停止させるためのストッパを備えたアクチュエータを制御するものである。制御装置は、電動モータへの通電を制御する制御部を備えている。制御部は、駆動軸が回動範囲の端まで回動するように電動モータに通電を行った後、電動モータが逆回転するように通電を行うように構成されている。
(もっと読む)
電動駆動装置および電池パック
【課題】低速での回生制動量を増加できる電動駆動装置を提供する。
【解決手段】二次電池Eを電源としてインバータIによりモータMを駆動する電動駆動装置において、インバータIと二次電池Eの正極との間に設けられた第1スイッチング素子FET1と、一次巻線n1および二次巻線n2の各々の一端が第1スイッチング素子FETとインバータIとを結ぶ配線に接続されたトランスTと、トランスTの一次巻線n1の他端と二次電池Eの負極との間に接続された第2スイッチング素子FET2と、トランスTの二次巻線n2の他端から第1スイッチング素子FET1と二次電池Eとを結ぶ配線に二次電池を充電する方向の電流が流れるように接続されたダイオードD1と、インバータIからの回生電圧を昇圧させるように第1スイッチング素子FET1および第2スイッチング素子FET2を制御する制御回路22を備える。
(もっと読む)
回生時の過充電保護装置
【課題】簡単な回路で回生時の保護回路を実現でき、周辺機器に対する不要な電波、不要輻射などを生じることなく、周辺機器の安全を図れるようにする。
【解決手段】分圧回路30は、2次電池を用いた電源11のプラス・マイナス間の電圧を分圧する。比較回路33は、分圧回路30の分圧電圧と基準電圧を比較し、前記分圧電圧が所定値を超えると制御信号を得る。第1のスイッチ回路40は、制御信号に応答して電源11のプラス端子とマイナス端子間を短絡する。そして、第2のスイッチ回路12が、前記短絡動作に応答して、前記プラス端子と前記電源のプラス間をオフし、過充電を停止する。
(もっと読む)
電動アクチュエータの制御装置
【課題】電動アクチュエータと外部制御装置との間における入出力点数と信号線の配線工数を少なくする。
【解決手段】電動アクチュエータは、基台に往復動自在に装着されたスライドテーブルを有しており、スライドテーブルはモータにより回転される送りねじ軸により前進限位置と後退限位置との往復動ストローク端の間で駆動される。スライドテーブルを各ストローク端に移動させたときの当該ストローク端における送りねじ軸の回転数の基準回転数N0,N1は予めメモリに記憶されている。スライドテーブルが停止したときの送りねじ軸の駆動回転数Nと基準回転数N0,N1とを比較し、駆動回転数Nと基準回転数N0,N1とが一致したときには、スライドテーブルの停止位置がストローク端であることが判定される。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】往復移動するキャリッジを駆動するためのモータを制御する際に、キャリッジの動作が不安定になることを抑制する。
【解決手段】往復移動するキャリッジを駆動するためのモータを制御するモータ制御装置は、モータの回転数に相関する回転数相関値を検出する相関値検出部と、キャリッジとキャリッジの移動経路の端に配置された端部部材との接触を検出する接触検出部と、回転数相関値に基づきモータに駆動電圧を供給してモータの制御を実行する制御実行部と、を備える。制御実行部は、接触の検出後の所定の期間において回転数相関値に基づくモータの制御を実行しない。
(もっと読む)
駆動装置及び駆動装置の制御方法
【課題】コスト増や大型化を招くことなく、振動型モータの停止位置のより高精度な位置決めが可能な駆動装置を提供する。
【解決手段】駆動装置は、エンコーダにより検出される振動型モータの駆動情報に基づいて該振動型モータの停止位置を制御する際、予め定められた振動型モータの目標停止位置からエンコーダの複数のパルス信号分手前における該パルス信号の切替わり検出位置から複数のパルス信号の最後のパルス信号の切替わり検出位置までパルス信号の切替わりを検出するごとに振動型モータの駆動を一時停止する間欠駆動制御(ステップS15〜S18)と、該間欠駆動制御における振動型モータの駆動状態を基に、目標停止位置までの駆動条件を算出し、算出された駆動条件により、目標停止位置まで振動型モータを駆動して該目標停止位置で停止させる停止位置制御(ステップS25〜S27)と、を実行する。
(もっと読む)
多軸ロボット用電源回路およびその電源回路の遮断方法
【課題】簡潔な配線で安価で信号伝達の遅れを考慮する必要がなく、信号線の断線ですべてのモータ電源をオフにする多軸ロボット用電源回路を提供する。
【解決手段】 モータ電源遮断回路を駆動する安全ユニット10において、第1入力回路11に入力信号があるとき正常とする出力信号をCPU12と論理回路13に入力し、CPU12は入力信号が入ると出力信号を論理回路13とモータ電源遮断回路19に入力し、論理回路13は2入力で1出力を第1出力回路14に入力し、第2入力回路16に入力信号があるとき正常とする出力信号をCPU12と第2出力回路17に入力し、第1入力回路11または第2入力回路16に入力が断たれると出力を出さなくなることにより、CPU12がモータ電源遮断回路19を遮断動作させる。
(もっと読む)
1 - 20 / 58
[ Back to top ]