
Fターム[5H530AA02]の内容
Fターム[5H530AA02]の下位に属するFターム
Fターム[5H530AA02]に分類される特許
1 - 20 / 108
停電の有無を判定する停電判定部を有するモータ駆動装置
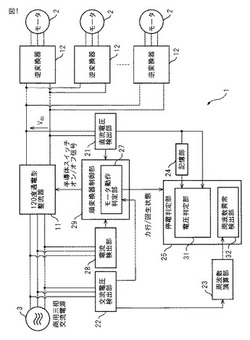
【課題】整流器回生動作中も交流電源側の停電を検出でき、停電の誤検出のないモータ駆動装置を実現する。
【解決手段】モータ駆動装置1は、交流側から供給された交流を直流に変換し、直流側から供給された直流を交流に変換する整流器11と、整流器11が出力した直流を交流に変換してモータ2へ供給し、モータ2からの回生電力を直流に変換して整流器11へ戻す逆変換器12と、整流器11の直流出力電圧を検出する直流電圧検出部21と、整流器11の交流出力電圧を検出する交流電圧検出部22と、検出された交流電圧の周波数を算出する周波数演算部23と、120度通電型整流器11の回生動作開始時点において検出された直流電圧を基準値として記憶する記憶部24と、120度通電型整流器11の回生動作期間中、検出された直流電圧と基準値と算出された交流電圧の周波数とを用いて、整流器11の交流側の停電の有無を判定する停電判定部25とを備える。
(もっと読む)
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するサーボモータ駆動装置

【課題】電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
(もっと読む)
モータ駆動装置及びこれを用いた電気機器
【課題】モータの急減速時や正転/逆転切換時における電源電圧の上昇を抑制する。
【解決手段】モータ駆動装置10は、電源端とモータ30との間に接続された上側トランジスタ21U、21V、21W及びモータ30と接地端との間に接続された下側トランジスタ22U、22V、22W各々のオン/オフ制御を行うロジック回路12と、電源端に印加される電源電圧VCCと所定の保護設定値との比較結果に応じた過電圧保護信号を生成してロジック回路12に送出する過電圧保護回路18とを有し、ロジック回路12は、電源電圧VCCが保護設定値を上回ったときに上側トランジスタ21U、21V、21Wをオフとして下側トランジスタ22U、22V、22Wをオンとする。
(もっと読む)
無効電流指令作成部を有するモータ駆動装置
【課題】入力された交流を直流に変換する直流変換部と、直流変換部が出力した直流をモータの駆動のための交流に変換する交流変換部と、を備えるモータ駆動装置において、過電圧異常を抑制することができる、制御が容易で低コストおよび省スペースのモータ駆動装置を実現する。
【解決手段】モータ駆動装置は、入力された交流を直流に変換する直流変換部11と、直流変換部11が出力した直流をモータ3の駆動のための交流に変換する交流変換部12と、直流変換部11の直流出力側の電圧を検出する電圧検出部13と、電圧検出部13が検出した電圧が所定の閾値を超えたとき、交流変換部12が無効電流を出力するよう制御してモータにおける消費電力を増加させる数値制御部14と、を備える。
(もっと読む)
速度制御装置
【課題】移動体の運転速度に関係なく、制御系の時間遅れに伴う着床位置誤差の影響を解消し、所望の着床位置での位置決め精度を向上した速度制御装置を提供することを目的とする。
【解決手段】移動距離設定器26で予め設定した移動距離L*から遅れ時間移動距離演算器31で求めた移動距離Ldを減算した値(L*−Ld)を移動距離の目標値としてクリープレス運転演算器33に入力する。クリープレス運転演算器33では、位置検出器12から位置検出信号が入力された時点のモータ速度指令値N*および移動距離目標値(L*−Ld)に基づいてクリープレス運転開始時の加速度の初期値α(0)と加加速度jを演算し、加速度指令発生器23が出力する加速度指令α*をクリープレス運転演算器33で演算した加速度指令α(0)に書き換える。速度指令発生器24では、加速度指令α(0)に基づいて得られる時々刻々の速度指令値N*を出力し、所望の着床位置Cでかご7を停止する。
(もっと読む)
エレベータ制御装置
【課題】エレベータ制御装置のインバータ内のスイッチング素子の、経過時間に対する温度変化を少なくして空冷し、かつ回生抵抗器も空冷する。
【解決手段】実施形態によれば、スイッチング素子を介してインバータの直流側と接続され、電動機の回生電力を消費する回生抵抗器と、回生抵抗器およびインバータを空冷するためのファンと、乗りかごの荷重値を検出する荷重検出手段と、行先階を検出する行先階検出手段とをもつ。また、この実施形態によれば、検出した行先階と荷重値をもとに、運転開始前に、運転に伴うインバータ内のスイッチング素子と回生抵抗器の温度変化パターンを予測する温度変化予測手段と、予測した温度変化パターンをもとに、経過時間に対するインバータ内のスイッチング素子の温度変化の値が所定の基準値以下となり、かつ回生抵抗器が空冷されるように、ファンの駆動電圧および駆動時間を制御するファン制御手段とをもつ。
(もっと読む)
電動パワーステアリング装置
【課題】開閉手段の作動音をユーザに聞こえ難くすることができる技術を提供する。
【解決手段】ドアを有する乗り物の進行方向を変えるためのステアリングホイールの操作に対するアシスト力を付与する電動モータと、電動モータに流れる電流を通電/遮断するべく電動モータに流れる電流の経路を開閉するリレーと、リレーの作動を制御するリレー作動部と、を備え、リレー作動部は、乗り物のドアの開閉音と重なるように開閉手段を作動させる。
(もっと読む)
モータ制御装置
【課題】平滑コンデンサからスナバコンデンサまで直接的に給電接続する特別な構成を設けることなくスナバコンデンサを十分に充電する。
【解決手段】平滑コンデンサ2と、2つのアームスイッチング素子11を直列に接続した組を3組並列に接続して3相としたインバータ部3と、インバータ部3の出力側に接続されたブレーキ回路整流器21と、ブレーキ回路整流器21に並列接続した制動抵抗器23と制動スイッチング素子22と、を有するダイナミックブレーキ回路部5と、制動スイッチング素子22に並列接続したスナバコンデンサ31を含むスナバ回路部6と、各アームスイッチング素子11に対するゲート信号と制動スイッチング素子22に対するブレーキ制動信号とを出力する駆動制御部7と、を備えるモータ制御装置100であって、駆動制御部7が、通常運転前に、ダイナミックブレーキを解除する処理を行い、スナバコンデンサ31を充電制御する処理を行う。
(もっと読む)
エレベータ制御装置
【課題】電力蓄積装置を複数のセルから構成し、そのセルの過電圧を簡易に、確実に検出できるエレベータ制御装置を提供する。
【解決手段】電力蓄積装置15を複数のセルでモジュール構成し、モジュール全体の電圧を検出する電圧検出手段20を設けると共に、n個のセルSe1〜Senのうちどれかが過充電になると異常を検出し、セル過電圧信号を出力するセル電圧検出回路V1〜Vnを設ける。そして、セル電圧検出回路V1〜VnによりセルSe1〜Senのそれぞれの過電圧値Vcoを常時監視すると共に、電圧検出手段20によりモジュール全体の過電圧値Vmo(=n×Vco)を常時監視する。
(もっと読む)
モータ駆動システム及びモータ駆動方法
【課題】モータの停止動作における回生容量の大きさを抑制できるモータ駆動システム及びモータ駆動方法を提供する。
【解決手段】モータの回転数の減少率に関して、回生直流電圧から交流電圧への変換に必要な電圧供給装置の回生容量が一定値であるように設定された可変減速レート、及び所定の停止時間でモータが停止するように一定の減少率が設定された一定減速レートを、それぞれ算出する減速レート算出装置と、モータの停止動作の開始時からモータの回転数が可変減速レートと一定減速レートとで一致する時刻まで可変減速レートに従ってモータを減速させた後、一定減速レートに従ってモータを減速させるようにモータ駆動装置を制御する制御装置とを備える。
(もっと読む)
モータ制御装置
【課題】装置自体の小形化または低コスト化を図ることができるモータ制御装置を提供する。
【解決手段】直流電源からの直流電力を交流電力に変換してモータへ供給するインバータブリッジを含むインバータブリッジ回路と、インバータブリッジ回路にPWM制御信号を出力する制御回路と、直流電源の正側負側間の平滑コンデンサに並列接続する回生電力処理回路と、インバータブリッジからモータへの交流電力供給ラインに接続する制動電力処理回路と、回生電力処理回路に含まれモータからの回生電力を処理する回生抵抗と、制動電力処理回路に含まれモータからの制動電力を処理する制動抵抗とを兼ねる共通抵抗とを有する。
(もっと読む)
モータ制御装置およびシステム
【課題】回生電力の消費処理を小規模でかつ低容量の回生抵抗器を使用して行うことができるモータ制御装置を得ること。
【解決手段】母線電圧を生成するコンバータ回路と、両端に印加される前記母線電圧を任意の大きさおよび周波数の交流電圧に変換してモータへ供給するインバータ回路と、前記インバータ回路に並列に接続されて両端に前記母線電圧が印加される回生抵抗器および回生トランジスタの直列回路を備える回生回路と、前記モータからの回生電力により前記母線電圧が所定値を超えたときに、該回生電力を前記回生抵抗器に消費させるため、前記回生トランジスタをオンさせる制御手段とを備えたモータ制御装置において、前記制御手段は、前記回生トランジスタのオン時間割合を、前記回生回路の状態である回生負荷率に応じて可変制御する。
(もっと読む)
モータの制御システム
【課題】モータの回生電力を好適に回収し、しかもその回生電力の有効利用を図る。
【解決手段】モータ電源回路13において、電力経路24,25にはコンデンサ26,27とスイッチ31,32とが各々設けられている。電力経路24,25と制御電源回路15の電力経路43とを接続する電力経路46,48にはスイッチ47,49が設けられている。制御回路14は、モータ回生期間において、スイッチ31,32の一方を閉鎖、他方を開放するとともに、スイッチ31,32の開閉の状態に応じて、スイッチ47,49の開閉を制御する。このとき、制御回路14は、各スイッチ31,32,47,49の開閉状態の切替を実施する。
(もっと読む)
電力制御装置
【課題】駆動モータに対して常に最適な電力制御を行うことができる電力制御装置を提供する。
【解決手段】駆動モータ23の回転サイクルC12および消費電力値V12を取得可能なスマートメータ11と、駆動モータ23の空転時に発生する回生電力を蓄電可能な蓄電機器13と、駆動モータ23および蓄電機器13の電力の流れ方向を切り替えるとともに、電力供給を入切する各スイッチ14・15と、を具備し、スマートメータ11は、駆動モータ23が停止している状態であると判断した場合には、各スイッチ14・15を制御して、駆動モータ23へ電力供給を行わず、駆動モータ23が空転していると判断した状態である場合には、各スイッチ14・15を制御して、回生電力を蓄電機器13に蓄電する。
(もっと読む)
蓄電器を用いたモータ駆動装置
【課題】ピーク電力軽減のために蓄電器が使用されるモータ駆動装置において電源から供給される電力の総量を低減する。
【解決手段】モータ駆動装置1は、PWM制御により電源14の交流と直流との間の電力変換を行うPWMコンバータ2と、PWMコンバータ2が出力する直流と周波数可変の交流との間の電力変換を行って周波数可変の交流によりモータを駆動するPWMインバータ3と、PWMコンバータ2とPWMインバータ3との間に設けられモータ8の駆動し得る量の電力を蓄積し得る蓄電器4と、PWMコンバータ2におけるPWM制御をオン又はオフする制御回路5と、を具備し、制御回路5がPWM制御をオンする間はPWMコンバータ2により蓄電器4の電圧は電源より高く制御され、制御回路5がPWM制御をオフすることで電源より高い電圧に充電されていた蓄電器4からモータ8へ電力供給を行いモータ8の減速制御期間中の回生電力を蓄電器4へ回収する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
モータ駆動スイッチ
【課題】本発明は、モータ駆動スイッチの接点が焼付きを起こした場合でもモータの固定子巻き線が損傷しないようにすることを目的とする。
【解決手段】本発明に係るモータ駆動スイッチは、モータの起動操作において、第1接点21が電源P側端子(3)に切替わるタイミングは、第2接点22がアーマチュアP側端子(6)に切替わるタイミングよりも早くなるように設定されており、前記モータの起動解除操作で、第2接点22がアーマチュアN側端子(4)に切替わるタイミングは、第1接点22がアーマチュアP側端子(1)に切替わるタイミングより早くなるように設定されている。
(もっと読む)
電気推進船の駆動装置及び駆動方法
【課題】船内電源の電源母線の電圧を急変動させることなく、簡単な方法で停止制御を行うことが可能な電気推進船の駆動装置及び駆動方法を提供する。
【解決手段】船舶の推進用プロペラPの軸に接続した電動機1と、船内電源3から給電され、電動機1を駆動する電力変換装置2と、電力変換装置2を制御する制御装置4とで構成する。制御装置4は、外部からの速度指令に基づいて速度制御してトルク基準を出力する速度制御部41と、外部からの運転指令に基づいて電動機1の運転停止を制御する運転シーケンス制御部46を備える。運転シーケンス制御部46は、外部からの運転指令がオフとなったとき、一旦速度基準を所定の減速率で減速し、トルク基準が所定値以下となるか、または力行から回生に変化したときに電力変換装置2を停止して電流を遮断する。
(もっと読む)
モータ制御装置とその故障検出方法
【課題】ダイナミックブレーキ回路の故障検出を容易にする。
【解決手段】この発明のモータ制御装置は、第1監視信号を出力する第1故障検出回路と、故障検出用スイッチと、第2監視信号を出力する第2故障検出回路と、第1監視信号と第2監視信号を入力とする制御回路部と、を具備する。第1故障検出回路と第2故障検出回路は、フォトカプラを備え、フォトカプラが微小な故障検出電流を、故障検出のための第1監視信号と第2監視信号とに変換する。
(もっと読む)
生産機器の制御装置及び生産機器用モータの停止制御方法
【課題】位置検出器に故障が発生した場合でも、簡単な構成で迅速にモータを停止させることができる生産機器の制御装置を提供する。
【解決手段】制御装置は、位置検出器の異常を判定すると(S1:YES)、先ず、ダイナミックブレーキを作用させ(S5)、その制動期間中に検出されるサーボモータの各相電流の値から、具体的には各相電流Iu,Iv,Iwの比からサーボモータの現在の電気角θEを推定する(S6〜S9)。そして、ダイナミックブレーキを解除すると、推定した電気角θEに応じて逆トルク制動を行う(S12)。
(もっと読む)
1 - 20 / 108
[ Back to top ]