
Fターム[5H540BA06]の内容
Fターム[5H540BA06]に分類される特許
21 - 40 / 55
ブラシレス電気機械
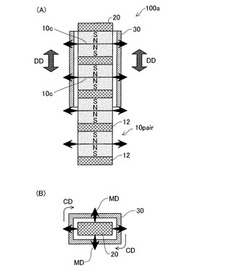
【課題】制御回路の構成がより単純で効率の良いブラシレス電気機械を提供する。
【解決手段】第1の移動部材は永久磁石対(10pair)を少なくとも1つ含む磁石集合体(20)を備えており、第2の移動部材は電磁コイル(30)を含んでいる。制御回路は、電磁コイル(30)への電力の供給又は電磁コイル(30)からの電力の回生を制御する。永久磁石対(10pair)は、第1の極同士が互いに接する同極接触面(10c)上の磁場方向(MD)であって、永久磁石対の中央から外側に向かう磁場方向(MD)に沿って最も強い磁場を発生する。電磁コイル(30)は、磁場方向(MD)と交差する方向(CD)に電流が流れるように配置されている。
(もっと読む)
モータ駆動回路

【課題】モータコイルに流れる電流量の変更を指示する回路の処理負荷を軽減する。
【解決手段】モータコイルに流れる電流量を制御するモータ駆動回路であって、設定電流量に応じた入力される設定電流信号と、モータコイルに流れる電流量に応じた電流信号とに基づいて、設定電流量と電流量との比較結果を示す比較信号を出力する比較回路と、比較回路から出力される比較信号に基づいて、モータコイルに流れる電流量を設定電流量に段階的に変化させるべく、モータコイルに流れる電流量を制御する電流制御信号を段階的に更新する電流制御信号更新回路と、電流制御信号更新回路から出力される電流制御信号に基づいて、モータコイルを駆動する駆動回路と、を備える。
(もっと読む)
効率的な広いダイナミックレンジのコイル駆動用のシステムおよび方法
【課題】1つまたは複数のフォースコイル(14、18)を駆動するための方法とシステムを提供すること。
【解決手段】第1のコイル(14)に結合されたPWMドライブ(12)と、第2のコイル(18)に結合されたリニアドライブ(16)とを含む、フォースコイル(14、18)を駆動するためのシステム(10)が提供される。PWMドライブ(12)は第1の力を加えるために第1のコイル(14)を効率的に駆動する。リニアドライブ(16)は、実質的にノイズの無い第2の力を加えるために第2のコイル(18)を駆動する。第1の力は第2の力より大きい。
(もっと読む)
リニアモータの制御装置
【課題】 リニアモータの運転には一般的に回転振動(ヨーイング、ピッチング、ローリング)を伴い、速度・位置の精度を保つことが難しいので、リニアモータの推力の変化に連続して対応できる制振制御手段を得て、ハイゲイン化された高速で高精度の駆動が行える方法と装置を求める。
【解決手段】 リニアモータの可動部106の重心点13における位置および速度の情報10を、位置もしくは速度センサ8の情報10と速度制御器102から出力された信号( 推力指令値11) より推定する推定手段( オブザーバ107)を有し、この推定手段107から得られた位置および速度の推定情報16,17をそれぞれの制御器102,104へフィードバックすることで、位置および速度制御を行うリニアモータの制御方法とその装置から成る。
(もっと読む)
アクチュエータ
【課題】簡易な構造で小型を図ることができる面移動型のアクチュエータを提供する。
【解決手段】ベース部材2と、前記ベース部材に対し、第1の軸方向Xへのスライドを可能に配置した第1のスライダ10と、前記ベース部材に対し、前記第1の軸方向とは垂直な第2の軸方向Yへのスライドを可能に配置した第2のスライダ20と、前記第1のスライダ10と第2のスライダ20との交差位置に、当該第1のスライダ及び第2のスライダに摺動自在に嵌合して平面内を移動可能な移動片30と、前記第1のスライダ10及び第2のスライダ20それぞれの一端に固定された磁石MG−1、MG−2と、前記それぞれの磁石が内部空間を移動するように配置したコイル15、25とを備えているアクチュエータである。
(もっと読む)
モ−タ駆動装置とそれを用いた露光装置
【課題】電源部とモ−タ駆動回路部等が一体的に筐体に配置されている回路構成と配線を、筐体のみそれぞれ別途分離したアンプラックを構成すると、分離された複数の電源部と複数のモ−タ駆動回路部等が、無秩序に配置され、散乱し、配線の引き回し等の無駄を生じる。
【解決手段】複数のモ−タにより駆動される駆動対象物と、モ−タを駆動するモ−タ駆動装置と、モ−タ駆動装置に電力を供給する電源部アンプユニットと、を備える露光装置であって、駆動対象物を駆動する複数のモ−タは、モ−タごとに各々一のモ−タ駆動回路を備え、モ−タ駆動回路は、駆動対象物の用途及び/又は目的ごとに、一の電源部アンプユニットに接続される露光装置とする。
(もっと読む)
アクチュエータ駆動装置およびカメラ装置
【課題】電磁アクチュエータのステップ駆動をオープンループ制御で速やかに安定的に行わせることの出来るアクチュエータ駆動装置、並びに、オープンループ制御のVCMを用いて短時間でフォーカスサーチを行うことのできるカメラ装置を提供する。
【解決手段】可動部が弾性部材に支持されてなる電磁アクチュエータをオープンループ制御で駆動するアクチュエータ駆動装置である。そして、可動部を所定量変位させる場合に、電磁アクチュエータの駆動電流Iを第1電流値から一定の勾配で変化させて第2電流値にするとともに、前記一定の勾配で駆動電流を変化させる期間がnT(Tは前記弾性部材の弾性力に基づく前記可動部の固有振動周期、nは自然数)に設定されている。
(もっと読む)
リニアモ−タ装置及びこれを用いた露光装置
【課題】一つのストロ−クを構成する固定子上には一つの可動子が備えられ、その固定子に電流を供給するための電流ドライバも一つの構成では、二以上の可動子に対応することはできない。また、そのまま可動子を複数個搭載し、ストロ−ク上の一連の配設固定子コイルに電流を供給した場合には、供給電力ロスが大きくなったり、あるいは、選択的に固定子に電流供給する場合には、電流供給の可否を制御するスイッチや配線が多数必要になったりする問題が懸念される。
【解決手段】複数の可動子と、複数のコイルからなる励磁切り替え型固定子と、コイルに励磁電流を供給する通電手段を備えるリニアモ−タ装置であって、通電手段が、複数の可動子のうち少なくとも二以上の可動子が移動可能な共用コイル部へ、複数の可動子の位置に応じて、複数の励磁電流を選択的に供給するリニアモ−タ装置とする。
(もっと読む)
振動除去装置
【課題】振動除去装置において、振動がない基台を基準として用いることなく、対象物の振動を抑制または除去することである。
【解決手段】振動除去装置10は、振動除去対象物である定盤8の加速度を検出する加速度センサ12と、慣性体と慣性体を移動駆動するアクチュエータ機構を含む装置本体部20と、加速度センサ12の検出値に応じて装置本体部20のアクチュエータ機構を駆動制御する制御部16と、装置本体部20において慣性体を流体支持等するための流体を供給する流体供給部14とを含んで構成される。装置本体部20は、振動特性的に弱いバネ定数を有する保持バネによって保持される慣性体を含み、定盤8に取り付けられる。
(もっと読む)
位置決め装置
【課題】簡素且つ軽量な構成で高精度な位置決めを実現できる位置決め装置を提供する。
【解決手段】移動部材3の両端近傍をスライダ3d、3dと支持部3bとでそれぞれ支持することで、移動部材3をガイドレール2,2に沿って精度良く移動させることができると共に、移動部材3に熱膨張が生じた場合でも、その熱膨張分を静圧軸受3aを介して基台1に対して非接触状態で支持される支持部3bの変位により吸収し、移動部材3に歪みを与えない。更に、リニアモータ5、5が、基台1に対して、移動部材3の両端側を駆動するので、スライダ3d、3dと支持部3bとで移動時の抵抗が異なる場合でも、リニアモータ5、5による駆動を相対的に調整することで、駆動時における移動部材3の姿勢変化を抑えることができ高精度な位置決めを実現できる。又、移動部材3の両端側を駆動することで移動部材3の剛性を低くでき、移動部材3の軽量化を図ることができる。
(もっと読む)
リニアモータ用通電制御回路及びリニアモータ
【課題】 載置重量が極めて大きく、かつ、駆動距離を大きくする必要があるXYステージの駆動を行なうリニアモータ用通電制御回路とリニアモータを提供する。
【解決手段】 リニアモータのブレーキ指令により、多相コイルに発生する回生エネルギーを回生ブレーキ抵抗に導いて前記回生エネルギーを減少させる回生ブレーキ回路と、リニアモータの駆動を減速させる減速指令により、多相コイルに発生する回生エネルギーの電圧が所定の値を超えたときに、この回生エネルギーに基づく電圧を低下させる回生消費抵抗を有する回生消費回路とを備えたリニアモータ用通電制御回路、及びこの通電制御回路を用いたリニアモータである。さらに、通電制御回路は商用200Vを整流して280V以上に昇圧する昇圧回路と、多相コイルはコイルを冷却する冷却手段を備えている。
(もっと読む)
モータ駆動回路
【課題】パルス信号の電圧レベルによらずPWM信号におけるHレベルとLレベルの比率に応じてモータを制御する。
【解決手段】モータ駆動回路は、入力されるパルス信号が一方の論理レベルの場合は所定の第1電圧を出力し、前記パルス信号が他方の論理レベルの場合は所定の第2電圧を出力する電圧変換回路と、前記電圧変換回路から出力される前記第1及び第2電圧に基づいて、モータコイルの駆動を制御する駆動制御回路と、を備える。
(もっと読む)
磁気ディスク制御装置
【課題】PWM・リニア併用方式を採用しつつシーク動作の短縮化を図った磁気ディスク制御装置を提供する。
【解決手段】VCMドライバは、モード制御信号に対応して上記磁気ヘッドが隣接するトラックを順次に走査するトラッキング動作のときにリニア動作を行い、上記磁気ヘッドがトラックを跨いで移動するシーク動作のときにPWM動作を行う出力段を有する。電圧生成部は、同じ駆動電圧に対応した上記PWM動作とリニア動作との間のオフセットに相当するオフセット補償電圧を形成する。上記VCMドライバは、上記リニア動作のときには駆動電圧を上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。上記VCMドライバは、上記PWM動作のときには駆動電圧に上記オフセット補償電圧を加えて上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。
(もっと読む)
完全な差動ボイスコイルモータ制御のための、オンチップ補償
差動ボイスコイルモータ制御機能を備えるディスクドライブコントローラが開示される。差動ボイスコイルモータ制御機能は、内部制御ループのための、直列接続された1以上のMOSトランジスタから成る抵抗器を含む、オンチップ補償ネットワークを備える。補償ネットワークにおけるMOSトランジスタのゲートは、調整電流に基づいてバイアス電圧で駆動される。調整電流は、集積回路における過程及び温度変化、例えばオンチップコンデンサ内の変化などに伴って変化するよう、得られる。オンチップ補償ネットワークは、内部制御ループを適切に補償するよう、ディスクドライブ内のボイスコイルモータの駆動において所望の周波数応答を与えるよう、十分正確に調整可能である。 (もっと読む)
リニアモータの制御方法、制御装置及び電子機器
【課題】リニアモータの低コスト化と小型化及び低騒音化を達成することができるリニアモータの制御方法及びその制御方法が実行可能な制御装置並びにその制御装置を備えた電子機器を提供すること。
【解決手段】リニアエンコーダ21からの位置情報に基づいて、リニアモータ20の相切替を行う。これにより、リニアモータに内蔵されていた磁極検出手段を不要とすることができるので、リニアモータの低コスト化と小型化を達成することができる。
(もっと読む)
ボイスコイルモーターと磁気弾性力による位置決め制御方法
【課題】本発明はボイスコイルモーターに磁気弾性力を発生させる方法と、その磁気弾性力を利用して位置決め制御する方法である。
【解決手段】磁気回路部品と電気回路部品を含み、該磁気回路部品は少なくとも一つの磁界を発生する。電気回路部品は少なくとも一つのコイルと少なくとも一つの磁気導体を含み、該コイルに電流を流す時、移動方向に推力が生じ、該磁気導体と前記磁気回路の間に、正方向のカップル力を発生させ、且つ前記移動方向に磁気弾性力を持たせる。更に前記ボイスコイルモーターに設置した懸架機構が、前記正方向のカップル力による予圧を受け、移動時のあそびを解消できる。前記推力と前記磁気弾性力とのバランスを利用するのみで板ばねのような弾性体を一切使わずに、位置決め制御ができる。
(もっと読む)
アクチュエータ、及びそれを備えたレンズユニット、カメラ
【課題】可動部分を固定部分に対して平行に、安定して支持することができるアクチュエータを提供する。
【解決手段】本発明は、画像安定化用レンズを移動させるアクチュエータ(10)であって、固定側部材(12)と、画像安定化用レンズが取り付けられた可動側部材(14)と、この可動側部材を支持する可動側部材支持手段(18)と、可動側部材に取り付けられ、画像安定化用レンズの光軸を中心とする円周上に配置された少なくとも3つの駆動用磁石(22)と、固定側部材に各駆動用磁石に対応して取り付けられた駆動用コイル(20)と、固定側部材に取り付けられ、駆動用磁石の磁力によって、可動側部材を固定側部材に吸着させる吸着用ヨーク(26)と、可動側部材の位置を検出する位置検出手段と、検出された位置情報に基づいて、各駆動用コイルに流す駆動電流を制御する制御手段(36)と、を有することを特徴としている。
(もっと読む)
ボイスコイルモータ駆動回路および磁気ディスク記憶装置
【課題】 トラッキング時における磁気ヘッドの位置決め制御の高精度化とシーク時間の短縮によるアクセスの高速化を同時に達成可能にするボイスコイルモータの駆動制御技術を提供する。
【解決手段】 磁気ヘッドを移動させるボイスコイルモータ(108)と、該ボイスコイルモータの駆動電流をPWM方式で駆動しコイルの電流を検出してフィードバック制御することにより上記磁気ヘッドの位置決め制御を行なうボイスコイルモータ駆動回路(110)とを有する磁気ディスク記憶装置において、上記ボイスコイルモータのコイル電流を検出するアンプ(113)の出力をサンプル・ホールドせずに誤差アンプ(114)に供給する。また、PWM駆動時にボイスコイルモータのコイルの端子に印加される駆動電圧のスルーレートを制御する回路(PWMコンパレータ)を設けるようにした。
(もっと読む)
リニアモータ、レンズ駆動装置及びデジタルカメラ
【課題】 簡易な構成でコイル体の駆動制御が容易にでき且つ騒音を低減できるリニアモータ、レンズ駆動装置及びデジタルカメラを提供する。
【解決手段】 本発明のリニアモータ7は、ヨーク17と、マグネット19と、コイル体23と、駆動制御部31とを備え、コイル体23を構成するコイルに通電して生じる電磁力によりヨーク17に対してコイル体23が相対的に直線駆動するリニアモータであって、駆動制御部31はコイル体23にパルス電流を供給し且つ供給するパルス電流の周波数を可聴帯域外の周波数としている。
(もっと読む)
リニアモータ、画像読取装置及び画像形成装置
【課題】磁束密度を検出するセンサを用いることなく可動子を移動制御することが可能なリニアモータ、リニアモータを搬送装置として備えた画像読取装置及び画像形成装置を提供する。
【解決手段】制御部17はリニアモータ1の制御を行う。制御部17には、配列された複数の磁石6の磁極間情報や磁束密度や可動子7が原点に移動する初期動作時に電磁コイル8に供給される電流値の基準値となる基準電流値等が記憶されている記憶部18と、検出したリニアモータ16の速度と記憶部18による目標速度との差を算出する差分出力部19と、初期動作時にリニアモータ16に供給されている電流値と基準電流値との比較等をする演算部20と、駆動制御信号に基づきリニアモータ16に駆動電力を供給する電力制御部21とが設けられている。電力制御部21は、余弦関数に基づいて電磁コイル8のコイルに駆動電力を供給し、リニアモータ16を駆動制御するようになっている。
(もっと読む)
21 - 40 / 55
[ Back to top ]