
Fターム[5H540EE05]の内容
リニアモータの制御 (2,479) | 制御、演算 (578) | フィードバック制御をするもの (314) | 位置をフィードバックするもの (150)
Fターム[5H540EE05]に分類される特許
141 - 150 / 150
コイルを有する駆動源の駆動制御回路
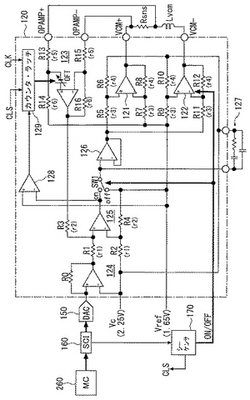
【課題】ボイスコイルモータのようなコイルを有する駆動源を高精度に駆動制御することができる駆動制御用半導体集積回路を提供する。
【解決手段】コイル駆動回路121,122と、コイルに流れる電流を検出する電流検出回路123と、電流指令値をアナログ信号に変換するAD変換回路150と、電流検出回路123の出力とAD変換回路150の出力に基づいて駆動回路121,122を駆動制御するための信号を生成する電圧入力−電流出力型の増幅回路125とを備えた駆動制御回路120において、AD変換回路150に所定の電流指令値を与えて上記コイルの端子に所定の電圧を印加しかつコイルに電流が流れないようにした状態で、電流検出回路123の出力とAD変換回路150の出力に基づいて、電流検出回路123の出力のずれを判定し、電流検出回路123の電流値もしくは抵抗値を調整して制御系のオフセットをキャンセルする。
(もっと読む)
固定子位置フィードバック制御器
固定位置フィードバック制御器。第1の位置モニタリングは、機械土台によって相対的な動きに対して支持される固定子の位置に応答する。第2の位置モニタリングデバイスは、機械土台に対する搬送車の位置に応答する。アクチュエータは固定子との相互作用を介して搬送車を移動させるために提供される。サーボ制御器は、第1および第2の位置モニタリングデバイスの出力における差異に応答して、機械土台に対する搬送車の位置を制御する。  (もっと読む)
(もっと読む)
電気的位置決め駆動部を備えた機械
生産機械、工作機械、ロボット等は、電気的位置決め駆動部(4、10)を持つ。該駆動部は、固定子(11)と、少なくとも1つの走行方向に移動可能な可動子(12)を持ち、可動子は、固定子に対し走行方向と異なる少なくとも1つの支持方向において磁場で非接触支持される。位置決め駆動部にセンサ装置(14)が付属し、該装置で支持方向における可動子の固定子に対する変位量を非接触で検出する。位置決め駆動部に制御装置(17)も付属し、制御装置にセンサ装置で検出した可動子の固定子に対する変位量が供給される。制御装置で、支持方向における可動子の固定子に対する変位量と、支持方向での可動子の固定子に対する目標支持位置とに基づき、位置決め磁石システムに対する調整信号を求め、これを磁石システムに供給し、磁石システムにより少なくとも1つの支持方向での可動子の固定子に対する支持位置を非接触に追跡する。  (もっと読む)
(もっと読む)
リニアアクチュエータ

【課題】 一対のリニアモータのスライダ間を結合するアーム部材の中点位置の制御性を向上すると共に、ドライバの構成を簡素化できるリニアアクチュエータを実現する。
【解決手段】 位置検出手段を備えた一対のリニアモータを有し、このリニアモータのステータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、
前記一対の位置検出手段の出力に基づき前記スライダ間の中点位置信号を算出する中点位置検出手段と、
前記中点位置信号と目標位置信号との偏差に基づき前記スライダを共通のドライバにより駆動する位置制御手段と、
を備える。
(もっと読む)
リニアモータ用位置検出装置
【課題】 リニアモータの位置決め精度を向上する装置を提供する。
【解決手段】 固定子20は、表面磁性が異なる2種類のマグネットを直線移動方向に交互で、一定間隔に配列した構造を備える。可動子30は、固定子20に対して一定間隔を維持しつつ、直線方向に移動自在に配置されコイルを備える。可動子30と一体に設けられる検出ヘッド50は、固定子20の磁束を検出して、制御装置60へ送る。固定されたレーザ測長器100は、可動子に設けたターゲット110に対してレーザビームLBを照射し、その反射光から、レーザ測長器とターゲットとの間の距離寸法を高精度に測定する。マグネットスケールとして利用する固定子20の位置と、測定されたレーザ測長器100の高精度の位置データとを比較し、固定子の位置に対応する補正データを算出し、記憶装置70に記憶し、モータの位置決めに利用する。
(もっと読む)
平面モータの初期化方法、平面モータ、リソグラフィ装置、およびデバイス製造方法
【課題】追加の判断システムを必要とせず、平面モータを初期化する初期化方法を提供する。
【解決手段】表面に交番磁極を有した磁気プレート12に対向したコイルアセンブリ2に三相交流電流を供給する平面モータにおいて、磁界の電流によって生じる力の方向を決定するための各コイル2,4,6を流れる電流のコミュテーションオフセット角は、生成される力が水平摩擦力を超過しないようにしながら、生成される力が磁気プレート12に垂直に導かれる時を判断することで決定される。コイルアセンブリ2のエンドストップ22の最大圧縮、もしくは、最大圧力を判断することにより、生成される力がいつ磁気プレートに垂直に導かれるかを判断することができる。
(もっと読む)
駆動機構
【課題】、磁性体に供給される信号の極性を制御して、磁性体を被駆動体を駆動させるための駆動源として利用した駆動機構を提供する。
【解決手段】駆動機構は、複数の磁性体を備える組と、この組に周波数信号を供給する手段と、上記磁性体間の吸引―反発による運動を形成する手段と、を備える。この運動が駆動機構の駆動源となる。  (もっと読む)
(もっと読む)
デュアルモード・ボイスコイルモーター・コントローラにおけるD級からリニア・オペレーションへの効率的な遷移
ディスクドライブ・システムのボイスコイルモーター(22)のためのデュアルモード位置決めドライバが開示される。リニア前段ドライバ及びパルス幅変調された前段ドライバ(46)は、両方とも、ボイスコイルモーター(22)を駆動するため「H」ブリッジに配置されるパワー・トランジスタ(50PH、50NH、50PL、50NL)に結合される。このため、位置決めドライバは、リニア・モード又はパルス幅変調されたD級モードのいずれかでパワー・トランジスタ(50)を駆動するように作動する。遷移期間において、パルス幅変調されたモードからリニア・モードにスイッチングする間、コンパレータ(56H、56L)は、「H」ブリッジの位相電圧を参照電圧と比較する。コンパレータ(56H、56L)の出力は、位相電圧がそれらのリニア・バイアス点に向かって事前調整されるように、パワー・トランジスタ(50)を駆動するようにPWM出力増幅器(54H、54L)に供給される。その結果、電流ボイスコイルモーター(22)を介する駆動電流の中断は最小限となる。 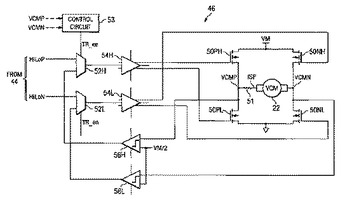 (もっと読む)
(もっと読む)
電動機の制御方法及び装置
本発明は、制御ユニット(1)がパラメータ化の可能な速度コントローラ(26)及びパラメータ化の可能な補助コントローラ(28)を備え、可動機械部(7、8)の位置(29)を検出し、前記可動機械部(7、8)の位置を変化させるための電動機(5)を備えた電動機(5)の制御方法に関する。速度コントローラ(26)の少なくとも1つのパラメータ(31)および/又は補助コントローラ(28)の少なくとも1つのパラメータ(33)を可動機械部(7、8)の位置(29)に応じて変化させる。  (もっと読む)
(もっと読む)
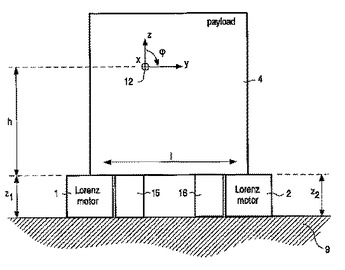
ペイロードのためのローレンツモータ制御システム
ペイロード(4)を動かす複数のローレンツモータ(1、2)を制御するための制御構成及び方法であって、ペイロードが重心(12)を有する、制御構成及び方法について開示している。高さ信号(z1、z2)は前記ペイロードの高さを検出するセンサから受信される。水平方向の軸の周りの重心の少なくとも1つの回転角度はそれらの高さ信号(z1、z2)から計算され、ペイロード(4)を支持するための所定の回転剛性が達成されるように、この少なくとも1つの回転角度から、ローレンツモータ(1、2)のための制御信号(C1、C2)が計算される。典型的なアプリケーションは電子顕微鏡又はリソグラフィ装置の床免震用緩衝部である。
 (もっと読む)
(もっと読む)
141 - 150 / 150
[ Back to top ]