
Fターム[5H540EE05]の内容
リニアモータの制御 (2,479) | 制御、演算 (578) | フィードバック制御をするもの (314) | 位置をフィードバックするもの (150)
Fターム[5H540EE05]に分類される特許
21 - 40 / 150
モータドライブ制御装置、モータドライブ制御方法
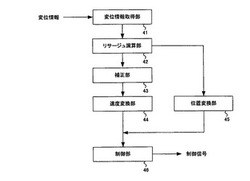
【課題】 モータドライブ装置の移動子の位置情報の再現性を維持しつつ、速度リップルを低減することができるモータドライブ制御装置、モータドライブ制御方法を提供する。
【解決手段】 モータドライブ装置における移動子より出力される位相のずれた2つの正弦波状信号に基づくリサージュ曲線に近似する楕円を示す楕円パラメータを算出する楕円算出部と、前記楕円パラメータにより示される楕円が真円となるように前記2つの正弦波状信号を補正する補正部と、前記補正された2つの正弦波状信号に基づくリサージュ曲線を前記移動子の移動速度を示す速度情報に変換する変換部と、前記速度情報とに基づいて、前記モータドライブ装置を制御する制御部とを有する。
(もっと読む)
制振制御システム及び電気機器

【課題】急峻に変化する振動に対する応答性を向上させ、その上で電力回生することができる制振制御システム,及びその制振制御システムを提供する。
【解決手段】洗濯機21の基部12と水槽14との間に、リニアモータ1とスプリング15とを組み合わせてなる電磁式サスペンション11を配置しリニアモータ1の固定子7側に位置センサ8を配置する。制御装置41は、位置演算部55により位置センサ8より出力される位置信号に基づいて位置θeを検出し、微分器57により速度vを検出すると、位置θe及び速度v及び基部12に取り付けられた加速度センサ16より出力される加速度信号aとモータ電流Ia,Ib,Icとに基づきリニアモータ1をベクトル制御して、洗濯運転時に水槽14について生じる振動を目標値まで抑制し、かつ、そのときに得られる最大の電力を回生する。
(もっと読む)
リニアスケール、リニアモータ、及びリニアモータの制御装置
【課題】低廉なコストで基準点からの精緻な距離を求めること。
【解決手段】スケールの磁性体26、27が生成する磁束密度に応じた波形信号を出力するスケール検出手段を設ける。このスケール検出手段は、当該スケールの移動方向Xにおいて、同一位相の正弦波信号A(B)を出力して当該スケールを連続的に検出するように前記スケール長に対応する一定の間隔を隔てて配置された複数のセンサ17a、17b(18a、18b)であり、前記スケールの両端部は、同一極性に設定されているとともに、単独のセンサ17a、17b(18a、18b)で検出された際の出力電圧が、残余の部位が単独のセンサ17a、17b(18a、18b)で検出された際の出力電圧の1/2となるような仕様に決定されている。
(もっと読む)
リニアモータの駆動システム及び制御方法
【課題】固定子が分散配置されたリニアモータにおいて、可動子の不必要な速度変動を防止してスムーズに駆動させながら位置制御を行う。
【解決手段】駆動装置は、制御装置からの位置指令と、対応する固定子の位置センサにより検出された位置と、の偏差を算出し、当該偏差と位置ゲインとに基づいて可動子の速度制御に用いられる速度指令を算出する位置制御を行い、対応する固定子の位置センサにより位置が検出される範囲のうち、磁石部の少なくとも一部の磁石が当該固定子のコイルと対向する制御範囲に可動子が進入してきたときに、可動子の運動速度を速度指令として偏差を逆算し、当該偏差と位置指令から可動子の位置を逆算し、算出された位置を、制御範囲に進入してきたときの可動子の位置として、位置センサにより検出された位置を補正して位置制御を行う。
(もっと読む)
リニアモータ位置検出システム
【課題】測長距離の制限を受けることがないと共にリニアモータの能力を十分に発揮させて制御時間の短縮を図ることができるリニアモータ位置検出システムを提供する。
【解決手段】リニアモータ5により移動されるテーブル4の直線運動をラック12とピニオンギア13により回転運動に変換するようにしたので、直線運動系での検出は有限目盛りであるのに対して回転運動系での検出は無限目盛りとなり、理論的には直線運動系の測長距離が無限であっても、直線運動系の測長距離を回転運動系の測長距離に容易に変換することができ、測長距離の変更に容易に対応することができる。
(もっと読む)
モータ駆動用半導体集積回路およびモータ用半導体集積回路
【課題】精度の高い駆動制御を行なうことができるコイルモータの駆動制御用半導体集積回路を得ること。
【解決手段】モータ駆動用半導体集積回路(200)は、回転駆動される磁気記憶ディスク上の記憶トラックに対して情報のリードを行なう磁気ヘッド(106)をディスク上で移動させるボイスコイルモータ(108)の駆動電流をボイスコイルモータのコイルに流れる駆動電流を検出しながらフィードバック制御により磁気ヘッドの移動を行なう。ボイスコイルモータをフィードバック制御する制御回路は、ボイスコイルモータのコイルに流れる駆動電流を検出する電流検出部、それにより検出された電流と与えられた電流指令値に基づいてボイスコイルモータのコイルに駆動電流を流すドライバ回路に対する駆動制御信号を生成するディジタル回路で構成された制御信号生成部(235)を備える。
(もっと読む)
リニアモータおよびリニアモータ駆動システム
【課題】簡易でより精度の高い位置決めが可能なリニアモータおよびリニアモータの駆動システムを提供することを課題とする。
【解決手段】固定子10と可動子20とが互いに相対運動するリニアモータ1であって、可動子に設けられ、相対運動の方向に異なる磁極のマグネットが交互に並べられ、可動子の位置を検出するための位置検出用マグネット部25と、相対運動する位置検出用マグネット部のマグネット25n、25sを検出して位置を検出するための位置検出用センサ16と、可動子に設けられ、位置検出用センサの出力を制御するためのゲート用マグネット35と、相対運動するゲート用マグネットを検出するゲート用センサ36と、を備える。
(もっと読む)
分散配置リニアモータおよび分散配置リニアモータの制御方法
【課題】固定子の分散配置に適した分散配置リニアモータおよび分散配置リニアモータの制御方法を提供する。
【解決手段】固定子10、10Bと可動子20とが互いに相対運動するリニアモータ1であって、固定子と可動子とは、互いに磁気的に作用をする複数の種類の極(12a、12b、12c)(22a、22b)と、複数の種類の極が種類の順に相対運動の方向に周期的に配列された周期構造とを各々有し、固定子は、相対運動の方向に複数離れて配列され、隣り合う固定子の固定子間距離D1、D2が、可動子の長さLmv以下であり、固定子の極がコイル11により構成され、隣り合う固定子の固定子間距離に基づき、コイルに供給する電流を制御するする電流制御手段と、を備える。
(もっと読む)
電磁アクチュエータシステムおよびその制御方法
【課題】非線形な推力特性を持つ電磁アクチュエータであっても、ほぼ線形の推力特性を持つ電磁アクチュエータとして制御することができる。
【解決手段】可動体3の周囲に配置されたソレノイドコイル4に電力を供給することにより可動体3を駆動する電磁アクチュエータシステム1において、システム全体の動作を制御するコントローラ10は、そのROMに予め記憶された電磁アクチュエータ2の最大推力特性線図を用い、ストローク検出器9で検出された可動体3のストローク位置から可動体3の最大推力を算出し、その算出された可動体3の最大推力と、可動体3の要求推力との比に最大推力発生時の電力値を乗じた値を制御電流とする。
(もっと読む)
モータ制御方法およびモータ制御装置
【課題】円滑で正確な位置決めを行うことができるモータ制御方法およびモータ制御装置を提供する。
【解決手段】 誤差補償後位置検出値と前記位置検出値との差分である誤差補償関数として、前記位置指令値を等速変化させる条件下において前記位置指令値と前記誤差補償後位置検出値との差分を最小化するような、前記検出誤差に対応する周期性をもつ関数を求める。また、求められた前記誤差補償関数を適用して、前記誤差補償後位置検出値を前記位置指令値に一致させるように前記モータの位置制御を実行する。
(もっと読む)
リニア型永久磁石同期モータの制御装置
【課題】モータの一方向のみの移動により、初期磁極位置を高精度かつ少ない演算量で推定し、制御装置の演算や構成を簡略化する。
【解決手段】位相角指令演算手段17は、摩擦脱出モードにおいて位相角指令値を所定値に固定する機能と、移動速度が制限値以上になった時に位相角指令値の増加割合を低減させる機能等を備える。電流指令演算手段16及びd軸電流指令手段8は、摩擦脱出モードにおいて電流指令値をランプ関数的に増加させる機能、移動検出時に電流指令値を第1の設定値まで低下させる機能、磁極位置検出モードにおいて電流指令値をランプ関数的に増加させる機能、移動速度が制限値に達した時に電流指令値を減少させて移動速度を低下させる機能、停止するまで電流指令値をランプ関数的に増加させて磁極位置を印加電圧の位置に一致させ、磁極位置を検出する機能等を備える。
(もっと読む)
制御装置
【課題】リニアアクチュエータを高速駆動可能な制御装置を提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段は、複数の永久磁石5を備えた界磁保持部材4と、界磁に対向するように配置されるコイル7を保持するコイル保持部材3とを備えて、界磁保持部材4とコイル保持部材3を相対変位させる推力を発生するリニアアクチュエータ2をベクトル制御する制御装置1において、界磁保持部材4とコイル保持部材3の相対速度に基づいてq軸電流指令値Iq*とd軸電流指令値Id*を求めてコイル7に流れる電流を制御する制御手段を備え、界磁保持部材4とコイル保持部材3の相対速度が上限閾値αから下限閾値βの間の範囲外となるとd軸電流指令値Id*を負の値とすることを特徴とする。
(もっと読む)
リニアエンコーダ
【課題】 電源投入時の立ち上がり時間を短縮させることが可能なリニアエンコーダを提供すること。
【解決手段】 リニアスケールには、位置情報としてインクリメント位置を示す複数の情報を所定ピッチで記録したインクリメント指標部と、インクリメント位置とは別の基準点位置を示す複数の情報を所定ピッチで記録した基準点位置指標部と、インクリメント位置及び基準点位置とは別の位置情報を持つアブソ信号を記録したアブソ指標部とが設けられ、隣接する任意の基準点位置間に含まれるアブソ信号の組み合わせが他の基準点位置間に含まれるアブソ信号の組み合わせの何れとも異なるように設定され、信号処理部は上記検出ヘッドの検出素子からの検出信号に基づいてアブソ信号の組み合わせを読み取り、予め記憶していたテーブルと比較して可動部のリニアスケール上の絶対位置を求めるように構成されているもの。
(もっと読む)
ステージ装置、及びステージ装置の制御方法、それを用いた露光装置及びデバイスの製造方法
【課題】コイルに流れる電流の遅れに起因して生じる、駆動すべき方向とは異なる方向への力を低減させる。
【解決手段】コイル4、及び複数の永久磁石を有するリニアモータと、コイル4に電流を供給する電流ドライバ9と、該電流ドライバ9への指令を生成する制御手段7とを備えたステージ装置であって、制御手段7は、コイル4と永久磁石との相対位置に基づいて算出した電気角を用いた正弦波を、リニアモータへの推力指令値に乗ずるコミュテーション処理により指令を生成し、更に、指令に対して、推力指令値に比例した振幅を持ち、かつ、正弦波と90度に位相がずれた正弦波の成分を含ませる。
(もっと読む)
リニアモータおよびリニアモータ装置
【課題】低価格で簡単な構成で位置検出可能なリニアモータを提供する。
【解決手段】リニアモータ1Aは、固定子3と、固定子3に対して移動可能に配設されている可動子2と、1対のホール素子17A、17B、1対の第3、第4のホール素子19A、19Bとを有する。ホール素子17A、17Bは、可動子2に配設される隣接する1対の磁極の幅Paの(1/4)の距離を隔ててリニアモータの長手方向に配設され、かつ、磁極の磁界に感応する距離を隔ててリニアモータの長手方向と直交する方向に配設され、90°の移動範囲の可動子の位置を検出することが可能である。第3、第4のホール素子19A、19Bは、可動子の絶対位置を検出するために使用する。
(もっと読む)
リニアモータ及びリニアモータユニット
【課題】ロッドが熱変形により伸縮しても、該ロッドの位置精度を充分に確保できるリニアモータを提供する。
【解決手段】マグネットを有し延在するロッド1と、前記ロッド1を囲むコイル4と、前記コイル4を支持するハウジング2と、を備え、前記マグネットの磁界と前記コイル4に流れる電流とによって、前記ロッド1と前記ハウジング2とを相対移動させるリニアモータ11であって、前記ロッド1には、一端に外部機器取付部105が設けられ、前記ハウジング2の前記外部機器取付部105側には、該ハウジング2に対する前記ロッド1の位置を検出する位置検出手段9が配設されていることを特徴とする。
(もっと読む)
推力リップル解析方法及び補正方法
【課題】モータで生ずる推力リップルの解析及び補正を精確に行うことができる推力リップル解析方法及び補正方法を提供する。
【解決手段】平面モータ1は固定子としての格子プラテン10と可動子としてのスライダ部20とを備えており、モータ制御装置30の制御によってスライダ部20が格子プラテン10上で移動されるとともに位置決めされる。平面モータ1で生ずる推力リップルを解析する場合には、格子プラテン10に対するスライダ部20の位置を変えながらスライダ部20を微小振動させたときの平面モータ1の応答特性を測定し、格子プラテン10に対するスライダ部20の位置に応じた平面モータ1の応答特性の変化から推力リップルを求める。
(もっと読む)
超電導リニアモータの制御装置、それを用いた露光装置及びデバイスの製造方法
【課題】超電導性に起因した外乱力を抑え、高精度な制御が可能となる超電導リニアモータの制御装置を提供する。
【解決手段】超電導線を用いたコイル204と、永久磁石を用いた磁石ユニット203a、203bとを有する超電導リニアモータと、コイル204に電流を供給する電流ドライバ107と、磁石ユニットの駆動指令dを受信し、電流ドライバ107に駆動指令dに基づく指令値を送信して磁石ユニット203a、203bの位置を制御する位置制御系101と、を有する超電導リニアモータの制御装置において、更に、コイルの温度情報とコイルと磁石ユニットとの相対位置情報とを引数にした制御指令テーブル105を有する変換指令算出部104を備え、変換指令算出部104は、制御指令テーブル105を参照して、超電導性に起因する外乱力を低減するように制御指令を変換し、制御指令を位置制御系101に送信する。
(もっと読む)
リニア電動機
【課題】重量/推力比を低減し、電力消費量を抑制するとともに運用コストの低減化が図れるリニア電動機を提供する。
【解決手段】円弧状の永久磁石の磁極がその中心軸を含む断面において最大でも90度づつ回転するよう当該永久磁石を隣接させて構成される外側永久磁石列11と、円環状の永久磁石の磁極が前記外側永久磁石列11と同じ向きの磁化ベクトル半径方向成分を有するとともに前記外側永久磁石列11と逆向きの磁化ベクトル軸方向成分を有する内側永久磁石列15を備える界磁と、前記外側永久磁石列11と前記内側永久磁石列15の間にリングの軸方向に移動できるように支持されるリング状の三相コイル31を備える電機子と、電機子に所定の推力を発生させる駆動装置9とを具備してリニア電動機を構成する。
これにより、鉄心を用いなくても電機子コイルに強い磁束を鎖交させることができ、電機子コイル全体に界磁の磁束が鎖交する。
(もっと読む)
モータ制御方法、および、モータ駆動装置の電源装置
【課題】高速応答性を備えかつ加速性を向上させるモータ制御方法を提供する。
【解決手段】モータを駆動するモータ駆動手段に電力を供給する電源を用意し、モータの加速または減速の開始に基づき、電源からの供給電力の電圧を上げ(S1、S2)、モータの加速または減速の終了に基づき、供給電力の電圧を下げる(S3、S4)。
(もっと読む)
21 - 40 / 150
[ Back to top ]