
Fターム[5H540EE05]の内容
リニアモータの制御 (2,479) | 制御、演算 (578) | フィードバック制御をするもの (314) | 位置をフィードバックするもの (150)
Fターム[5H540EE05]に分類される特許
41 - 60 / 150
リニアモータ
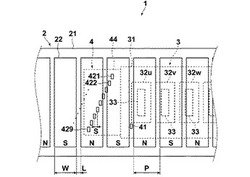
【課題】リニアモータにおいて、リニアスケールを使用することなく安価で、しかも数μm程度の精度での位置検出の実現を図る。
【解決手段】リニアモータ1は、複数の永久磁石22を隣り合う極性が異なるように、所定の隙間Lを有して所定ピッチPで列設した固定子2と、複数のリニアコイル32を有する、固定子2上を移動する可動子3と、固定子3上における可動子3の位置を検出する位置検出手段4とを備える。可動子3は、永久磁石22の磁界を検知する基準用磁気センサ41と、移動方向に所定の間隔Sで配置され、永久磁石22の磁界を検知する複数の測定用磁気センサ42を備える。移動時に、位置検出手段4は、基準用磁気センサ41からの基準信号RSに応じて隙間Lの上方を通過する各測定用磁気センサ42からの各測定信号MSを逐次取得する。
(もっと読む)
駆動制御装置、駆動制御方法および撮像装置

【課題】簡素な回路により移動部材を駆動するコイルから発生する磁気成分を相殺して、安定した移動部材の駆動を制御する。
【解決手段】駆動制御装置100は、移動部材14を駆動するための移動部材駆動部106と、移動部材14の制御目標位置を演算する目標位置演算部102と、移動部材駆動部106から発生する磁気成分を検出する磁気成分検出部108と、磁気成分検出部108により検出された磁気成分のうち、所定の磁気成分を相殺する磁気成分相殺部110と、磁気成分相殺部110により相殺された所定の磁気成分に基づいて、移動部材14が目標位置演算部102により演算された制御目標位置へ追従するように、移動部材14の駆動を制御する制御部104と、を備える。
(もっと読む)
モータ制御装置とそのトルクリップル補正方法及びモータ制御システム
【課題】複数の周波数成分を含む高調波トルクリップルの補正が可能であり、また、トルク指令からコギング等のトルクリップルを正確に求めることができるモータ制御装置及びそのトルクリップル補正方法を提供する。
【解決手段】 設定したサンプリング条件に従って、サンプリング部10へサンプリング実行指令を出力するサンプリング判定部9と、複数箇所でのモータ位置Pmでサンプリングした補正後トルク指令Tr*を使って求めた複数のフーリエ係数an,bnから、平均化処理した平均値フーリエ係数an*,bn*を算出する平均化処理部13とを備え、補正値演算部12は、設定した繰り返し回数Kだけ更新するフーリエ係数an,bnまたは平均値フーリエ係数an*,bn*を使ってトルクリップル補正値Thを算出する。
(もっと読む)
リニアモータシステム、リニアモータアクチュエータ及び制御装置
【課題】リニアスケールのコストを減らしつつ、高速な移動を可能とし、且つ、停止精度を高くする。
【解決手段】位置センサはリニアスケールの目盛りを読み取り第1の位置情報を生成し、磁気センサは可動子又は固定子の一方から発生する磁界を検出し、90°の位相差を持つ正弦波状信号及び余弦波状信号を出力し、位置検出手段は正弦波状信号及び余弦波状信号に基づいて第2の位置情報を生成し、リニアスケール又は位置センサの一方は可動子とともに移動し、リニアスケール又は位置センサの他方は可動子が移動可能な範囲のうちの一部の範囲のみで位置センサがリニアスケールの目盛りを読み取ることができるように配設され、制御装置は、可動子の位置が一部の範囲から外れているときには第2の位置情報を、可動子の位置が一部の範囲に入っているときに当該範囲内で可動子を停止させる場合には第1の位置情報を、コイルに流れる電流の制御に用いる。
(もっと読む)
位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】互いに直交するX軸およびY軸の少なくとも1軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の1軸方向の位置を検出するレゾルバ2と、
このレゾルバ2のスライダ1の進行方向側に隣接して配置されたレゾルバ2a,2bと、
このレゾルバ2a,2bの出力に基づいてレゾルバ2の出力を補正する補正部と、
この補正部からの出力に基づいてスライダ1の位置を算出する位置算出部と、
を備えたことを特徴とする。
(もっと読む)
磁気浮上制御装置
【課題】 任意の位置でゼロパワー制御が可能な磁気浮上制御装置を提供する。
【解決手段】 可動部,浮上アクチュエータ,位置センサ,およびコントローラとを備えた磁気浮上制御装置において、前記浮上アクチュエータは永久磁石23による吸引力または反発力を可変とした永久磁石磁力可変モータであり、該永久磁石磁力可変モータは永久磁石23による吸引力または反発力を変化させるためのアクチュエータである磁力操作モータ15を備え、コントローラ100は磁力操作モータ15の可動子位置を制御する磁力操作モータ制御器195を備え、磁力操作モータ15の可動子位置を操作することによって永久磁石磁力可変モータの発生する推力を操作する。
(もっと読む)
位置決め装置及び工作機械装置
【課題】電源投入時に現在座標を許容誤差範囲の精度で検出し、所定位置への復帰動作をすることなく電源投入時の位置から動作を開始できる位置決め装置を提供する。
【解決手段】固定部12に対する可動部8の相対位置を検出するためのインクリメンタルエンコーダ23とアブソリュートエンコーダ21とを備え、制御装置19は、インクリメンタルエンコーダ23及びアブソリュートエンコーダ21の信号データの対応データを記憶した記憶手段と、電源投入時に読み取られた前記アブソリュートエンコーダ21の信号データから可動部8の初期座標を求める初期座標読取手段25と、電源投入時以後に読み取られたインクリメンタルエンコーダ23の信号データを基に可動部8の現在座標を求める現在座標読取手段25と、対応データによりインクリメンタルエンコーダ23の信号データに変換する信号変換手段と、を備えている。
(もっと読む)
平面パルスモータ、露光装置およびデバイス製造方法
【課題】平面パルスモータにおける可動子の回転制御に有用な技術を提供する。
【解決手段】平面パルスモータは、可動子4および固定子12を有する。可動子4は、磁性体を含んで構成され、固定子12に対向する面に複数の凸部を有する。固定子12は、可動子4を駆動するための複数の磁気発生ユニット6a、6bを有する。平面パルスモータの制御部は、複数の磁気発生ユニット6a、6bのうち、可動子12の駆動方向に沿った可動子4の中心線Cを跨がず、かつ、可動子4が存在する領域からはみ出していない磁気発生ユニットから選択される磁気発生ユニットを動作させることによって可動子4の回転を制御する。
(もっと読む)
モータの制御装置及び制御方法
【課題】電磁接触器等が作動してモータへの電力供給が遮断されたような場合でも、ベクトル制御を利用することにより、電源遮断時の惰性による移動距離を可及的に減少させ得るモータの制御装置及び制御方法を提供する。
【解決手段】目標とするモータの動作に対応して設定されるd軸電流指令とq軸電流指令に従ってインバータからモータに供給されるモータ電流のd軸成分であるd軸電流とq軸成分であるq軸電流を制御する制御部182,183とを備えたモータ制御装置において、交流電源110からコンバータ130への電力供給が遮断されると、平滑コンデンサ122に蓄えられていた電気エネルギーをインバータ140に供給すると共に、d軸電流を制御する制御部182,183に対して所定の大きさの緊急停止用のd軸電流指令を出し、リニアモータ1にd軸電流を印加して緊急停止させることを特徴とする。
(もっと読む)
シャフト型リニアモータの位置検出装置
【課題】予め作成された補正データテーブルを用いて、可動子の検出位置を補正するにあたり、補正データテーブルとの同期化を容易にする。
【解決手段】可動子3を直線的に駆動させるシャフト型リニアモータ1の位置検出装置4であって、可動子3に設けられる磁気センサSと、磁気センサSが検出したシャフト2の磁束に基づいて可動子3の位置を検出すると共に、予め作成された補正データテーブルを用いて、可動子3の検出位置を補正するにあたり、可動子3の原点位置を認識し、補正データテーブルとの同期化を行う必要があるが、原点位置は、予め作成された原点データに基づいて特定される電気原点とし、磁気センサSの検出信号から得られる検出データが原点データに一致したとき、現在の可動子位置を原点位置として認識する。
(もっと読む)
リニア振動モータの駆動制御方法
【課題】低コスト、且つ、効率よく巻線へ電流を流す駆動制御を行う。
【解決手段】振幅検出部7が、非通電期間中に起電圧のサンプリングを行い、その中での最大点により振幅を算出する。これにより、サンプリング時間が多少ずれても十分に振幅を検出でき、次の巻線1への通電タイミングまでの時間に余裕がある。このため効率の良いタイミングで巻線へ通電することができ、モータ駆動の効率化、省電力化となる。
(もっと読む)
移動体システム
【課題】リニアモータのリニアスケールからの座標を用いて、移動体間の干渉を防止する。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のコイルを制御する。コイルのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換し、移動体の速度と先行の移動体との距離を求める。求めた距離と先行の移動体の速度とから、先行の移動体との干渉防止速度を求めて、コイルを制御する。
【効果】先行の移動体との間隔を不必要に大きくする必要が無く、システムの効率が改善する。
(もっと読む)
リニアモータ、該リニアモータを備えた部品実装装置、前記リニアモータを備えた部品検査装置およびリニアモータの駆動制御方法
【課題】可動子の駆動を制御するための、電流の電気角の初期値を与える位置を、従来よりも簡単に定める。
【解決手段】本発明のリニアモータの駆動制御方法は、固定子25と、固定子25に沿って直線的に往復移動する可動子24と、可動子24または固定子25の一方に備えられる電磁石emと、他方に備えられる永久磁石maと、可動子24の移動量を検出する手段とを有し、電磁石emに供給する電流を制御することで、可動子24を移動させるリニアモータの駆動制御方法である。とくに、可動子24を可動子24の可動範囲の一端側に位置するストッパ23aに当接するまで移動させるステップと、可動子24がストッパ23aに当接した位置で、電磁石emに、当該位置での永久磁石maと電磁石emとの位置関係に応じた電流の電気角の初期値ipを与えるステップとを含む。
(もっと読む)
平面モータ
【課題】位置検出の構成を単純化して信頼性を向上させると共に、コストの低減を図ることが可能な平面モータを実現する。
【解決手段】格子状の歯が平面上に形成されたプラテンと、前記歯と対向する面モータを内蔵し前記プラテン上面を移動して位置制御されるスライダと、を具備する平面モータにおいて、前記スライダに、前記プラテンの歯と対向して前記スライダの位置を検出するレゾルバを備える。
(もっと読む)
駆動制御装置、駆動制御方法および撮像装置
【課題】簡素な検出回路により移動部材を駆動するコイルから発生する磁気成分を検出して、安定した移動部材の駆動を制御する。
【解決手段】移動部材14を駆動する移動部材駆動部106と、移動部材の制御目標位置を演算する目標位置演算部102と、移動部材駆動部から発生する磁気成分を検出する磁気成分検出部108と、磁気成分検出部により検出された磁気成分から所定の磁気成分を減算する磁気成分減算部110と,磁気成分減算部により減算された磁気成分に基づいて、移動部材の現在位置を検出する現在位置検出部112、移動部材14が目標位置演算部102により演算された制御目標位置に追従するように、現在位置と制御目標位置との差分に応じて移動部材の駆動を制御する制御部104とを備える。
(もっと読む)
リニアモータの推力リップル測定装置およびその測定方法とモータ制御装置
【課題】 リニアモータの位置および推力指令に複雑な関数で依存する推力リップルを正確に測定することができ、モータ制御装置に適用する場合においても大きな容量のメモリを必要としないリニアモータの推力リップル測定装置およびその測定方法を提供する。
【解決手段】 推力指令F*およびリニアモータ4の位置Xに基づいてリニアモータ4の推力リップルFrを測定する推力リップル測定部20を備えたリニアモータの推力リップル測定装置において、推力リップル測定部20は、リニアモータ4の位置Xに基づいてフーリエ基本位相θを算出する位相計算器22と、フーリエ基本位相θおよび推力指令F*に基づいてリップルパラメータを決定するリップルパラメータ決定器21とで構成する。
(もっと読む)
リニアモータの推力リップル補償装置とモータ制御装置
【課題】 リニアモータの推力リップルの周期性が少なくても、また負荷が変化しても、モータの送りむらを減少させるリニアモータの推力リップル補償装置を提供する。
【解決手段】 推力指令およびリニアモータの位置に基づいて補償推力指令を生成する推力リップル補償部20と、補償推力指令を入力し電流指令を出力する電流指令変換器12と、リニアモータの電流を電流指令に追従させる電流アンプ13とを備えたリニアモータの推力リップル補償装置において、推力リップル補償部20は、リニアモータの位置を入力しフーリエ基本位相を出力する位相計算器22と、フーリエ基本位相および推力指令に基づいて推力リップル補償値を出力する推力リップル計算器21と、推力指令に推力リップル補償値を加算して補償推力指令を出力する加算器23とで構成される。
(もっと読む)
シリンダ位置認識システムを有する、リニアモータによって駆動されるピストンとシリンダとの組合せ体、リニアモータ圧縮機、および誘導センサ
本発明は、シリンダ位置認識システムを有する、リニアモータによって駆動されるピストンとシリンダとの組合せ体であって、エアギャップ(12)を形成する支持構造体(4)と、エアギャップ(12)の少なくとも一部に沿った可変電磁流を生成するモータ巻線(6)と、その一方の端部にヘッドを有するシリンダ(2)と、磁石(5)に接続されたピストン(1)であって、エアギャップ(12)を少なくとも部分的に含む変位経路の内部で移動するために、前記磁石が、前記モータ巻線(6)の電磁流によって駆動され、磁石の変位によってピストン(1)がシリンダ(2)の内部で往復移動するピストン(1)と、磁石(5)の変位経路の或る場所に配置された誘導センサ(8)であって、ピストン(1)がシリンダのヘッドに最も近い位置に到達するとき、誘導センサが、磁石の対応する位置に起因する磁界の変化を検出し、この磁界の変化から生じる電圧信号を生成するように誘導センサ(8)とを備えるピストンとシリンダとの組合せ体を開示する。さらに、本発明は、本発明のようなピストンとシリンダとの組合せ体を備え、シリンダの位置を認識ことができる、リニアモータ圧縮機を開示する。  (もっと読む)
(もっと読む)
振動モータを有する構成体及び振動モータを制御する方法
本発明は、振動モータ(100)と、前記モータ(100)を制御する制御回路(20)と、振動プロセス中に、規定の測定時間(t1、t2、t3)又は所定の測定位置(xM1、xM2及びxM3)における前記モータ(100)の電気特性を決定するセンサー配列体(5)と、少なくとも前記電気特性及び前記モータ(100)の一定の誘導性値(Lconst)によって前記モータ(100)の運動変数を決定するプロセッサ(21)とを備え、前記制御回路(20)は、作動状態において前記モータ(100)を前記運動変数の関数として制御し、前記測定時間(t1、t2及びt3)又は前記測定位置(xM1、xM2及びxM3)は、異なる電流(l)が前記モータ(100)に通っていても、前記モータ(100)の前記誘導性(L)が、少なくとも所定の電流間隔内(I1、I2)でおおよそ一定に保たれるように予め決定されている、構成体に関する。有利な実現によって、モータの誘導性の非直線性を考慮することができ、結果として振動振幅の制御が増加される。  (もっと読む)
(もっと読む)
電磁アクチュエータ制御装置及び方法
【課題】電磁アクチュエータにおいて、プランジャの位置を正確に検出する。
【解決手段】電磁アクチュエータ制御装置は、巻回されたコイル(210)と、コイル内に挿入されたプランジャ(220)と、コイルに通電を行うことで、プランジャを駆動する電流出力手段(110)と、通電に係る電流の時間平均を一定にするように、通電に対してパルス幅変調制御を行う電流制御手段(120)と、プランジャの駆動による誘起電圧を特定する誘起電圧特定手段(150)と、特定された誘起電圧がゼロである場合に、コイルのインダクタンスを算出するインダクタンス算出手段(170)と、算出されたインダクタンスに基づいて、プランジャの位置を検出する位置検出手段(180)とを備える。
(もっと読む)
41 - 60 / 150
[ Back to top ]