
Fターム[5H560AA08]の内容
無整流子電動機の制御 (40,007) | 用途 (2,430) | 電動車両 (821)
Fターム[5H560AA08]に分類される特許
81 - 100 / 821
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】相電圧設定手段は、モータ及びインバータの少なくとも何れか一方の器差を有するパラメータに基づいた電流位相誤差範囲を含む実電流位相領域を規定し、センサレス制御にてロータ位置を検出可能な安定運転電流位相領域を規定し、実電流位相領域が安定運転電流位相領域内となるように、電流ベクトル制御により設定された電流に、回転数検出手段で検出された回転数に応じた所定の位相差を加えたものを目標電流として設定する。
(もっと読む)
電気機械装置、移動体、ロボット及び電気機械装置の温度測定法

【課題】電磁コイルの近傍に別個の温度取得手段を取り付けることなく、電気機械装置や電磁コイルの温度を測定する。
【解決手段】電気機械装置10であって、永久磁石200と、電磁コイル100Aと、前記永久磁石の電気角を検知するためのセンサー300と、前記センサーからの信号に基づいて前記電磁コイルをPWM駆動する制御部(240、400)と、前記電気機械装置の温度測定時に前記電磁コイルと直列に接続される抵抗器715と、を備え、前記制御部は、前記駆動部が前記PWM駆動において前記電磁コイルに駆動電圧を印加しない期間において、前記電気抵抗の両端の電圧を測定し、前記電圧を用いて前記電磁コイルの電気抵抗を取得し、前記電磁コイルの電気抵抗を用いて前記電磁コイルの温度を取得する。
(もっと読む)
電気機械装置、移動体、及びロボット
【課題】電気機械装置の回生動作においてを滑らかに動作させる。
【解決手段】電気機械装置10であって、電磁コイル100u〜wを有する第1の駆動部材15と、前記第1の駆動部材15に対して相対的に移動可能な第2の駆動部材20と、前記電磁コイル100u〜wを駆動するとともに、前記第2の駆動部材20の減速時に前記電磁コイル100u〜wからのエネルギーの回生を行う制御部405と、を備え、前記制御部405は、前記電磁コイル100u〜wに生じる誘起電圧のゼロクロス点を中心とした第1の回生区間を設定して回生を実行する第1の回生モードを有する。
(もっと読む)
モータ制御装置
【課題】初期化処理の回数を抑制する。
【解決手段】伝達機構3は、パーキング位置と、非パーキング位置とに切換えられるマニュアルレバー3aを有する。マニュアルレバー3aは、SR型のモータ12によって駆動される。モータ12の回転位置は、エンコーダ13によって検出される。制御装置11は、エンコーダ13からの信号を計数することによりロータの位置を示すカウント値Nを算出する。制御装置11は、スリープ状態に移行する前に、エンコーダ13の信号を記憶する。さらに、制御装置11は、スリープ状態にある期間中に、エンコーダ13の信号の変化を検出する手段を備える。制御装置11は、スリープ状態にある期間中にエンコーダ13の信号が変化すると、信号の変化方向に応じて、カウント値Nを+1、または−1だけ補正する。この結果、スリープ状態から再起動されたときの初期化処理が回避される。
(もっと読む)
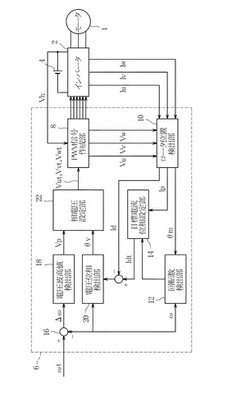
同期電動機駆動システム
【課題】ダイオードを挿入した回転子コイルを備えた同期電動機の低速センサレス制御において、複雑な処理を行う必要無く、回転角度の推定と磁極判別を同時に行うことが可能、言い換えれば推定範囲が−90°≦Δθ≦+90°ではなく、−180°≦Δθ≦+180°であるようなセンサレス制御方式による同期電動機駆動システムを提供する。
【解決手段】同期電動機7と、同期電動機7を制御する制御装置1とを備え、同期電動機は、固定子コイルを有する固定子4と、ダイオードが挿入された回転子コイル5を持つ回転子3とを有し、制御装置1は、固定子4に高周波磁束を発生させるための高周波磁束指令を生成する高周波磁束発生制御部11と、高周波磁束指令に応じて固定子コイルに発生した高周波電圧と高周波電流との少なくとも一方に基づいて、ダイオードに流れる電流の有無に応じた指標を算出するとともに、算出した指標に基づいて同期電動機7の回転角度を推定する回転角度推定部14とを有する。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】レゾルバの検出角度に関わらず検出精度が向上することが可能なモータ制御装置、モータ制御方法を提供することを目的としている。
【解決手段】微分係数が不連続な点を有する角度検出信号を検出して出力する角度検出部12と、検出された角度検出信号の不連続点を検出する不連続点検出部131と、検出された不連続点近傍の角度検出信号を、不連続点以前のランプ波形の角度検出信号に置換して出力する置換部133と、角度検出部の出力信号または置換された出力信号を、基準値と比較し直線近似により制御信号を算出する制御信号算出部134と、を備える。
(もっと読む)
モータ制御装置
【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度から、U相、V相、W相の各相モータ電圧へのPWMの指令Duty値を制限するDuty指令制限値を算出するモータ電圧指令制限値算出手段13と、Duty指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】モータと制御装置の各相特性を相殺して所望特性に変換すると共に、各相特性を一致させることによりトルクや速度等のリップル精度を向上させ、異音の発生がなく操舵に違和感のない電動パワーステアリング装置の制御装置を提供する。
【解決手段】ステアリングシャフトに発生する操舵トルク及び車速に基づいて操舵トルク補助指令値を算出し、操舵トルク補助指令値から各相電流指令値を算出し、各相電流指令値とモータの各相電流値とから算出した電流制御値に基づいてステアリング機構に操舵補助力を与えるモータを制御するようになっている電動パワーステアリング装置の制御装置において、モータと制御装置の各相特性を相殺する特性を有するフィルタを各経路に配設し、モータと制御装置の各相特性を一致させると共に、モータと制御装置の各相特性を所望特性とする。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
モータ制御装置
【課題】異常が発生した場合においても安定したモータ駆動を続けることができるモータ制御装置を低コストで提供する。
【解決手段】モータ制御装置1の各相に電流遮断回路23、38を設ける。プリドライバ回路12〜14のスイッチ素子20、21、35、36のいずれかに外乱が印加され、接合破壊のために短絡故障して大電流が流れたときに、電流遮断回路23、38によって故障したプリドライバ回路12、13または14に流れる電流を遮断し、電源電圧の低下を防ぐ。
(もっと読む)
ブラシレスモータ及びブラシレスモータの駆動方法
【課題】電気角6次及び電気角12次の両成分のトルクリップルを低減させることができるブラシレスモータ及びブラシレスモータの駆動方法を提供する。
【解決手段】ロータコア16は、軸線方向に2つ等分割して分割ロータコア16a,16bを形成した。そして、ロータコア16の磁極とステータの磁極(ティース9)との間で、電気角60度の磁気スキューが保たれているように、分割ロータコア16a,16b間をそれぞれ回転軸の中心軸線を回転中心に6度だけ一方向にずらすように配置した。これによって、ブラシレスモータに発生する電気角12次成分のトルクリップル波は消失させることができる。また、ステータは、2つの異なる3相巻線を電気角で30度のスロットピッチで巻回する。そして、その2つの異なる3相巻線に対して30度位相差をもって通電する。
(もっと読む)
車両用電動機の制御装置
【課題】回転センサを用いることなく、コンパクトで安価、かつ信頼性の高い車両用電動機の制御装置を得る。
【解決手段】この発明による車両用電動機の制御装置は、駆動アームの上スイッチング素子により固定子巻線の1つの巻線端子に通電し下スイッチング素子により前記巻線端子とは異なる1つの巻線端子に通電し残りの巻線端子は上スイッチング素子と下スイッチング素子の何れからも通電されない第1の通電状態と、上スイッチング素子により固定子巻線の1つまたは2つの巻線端子に通電し下スイッチング素子により前記1つまたは2つの巻線端子以外の全ての巻線端子に通電する第2の通電状態とを、第1の通電状態にある第1の固定子巻線または第2の固定子巻線における前記残りの巻線端子の電圧に基づいて交互に切り替えるようにしたものである。
(もっと読む)
電動モータ内蔵磁石の劣化検知方法及び装置
【課題】電動モータに内蔵される永久磁石の特性劣化を容易かつ確実に検知することができる電動モータ内蔵磁石の劣化検知方法及び装置を提供すること。
【解決手段】電動モータにおける永久磁石の劣化を検知するための電動モータ内蔵磁石の劣化検知方法であって、コイルに対して、回転子の永久磁石が形成する磁束の向きと同じ向きの磁束が生じるようにパルス電圧を印加し、コイルに流れる電流値のピーク値Ip+を測定する第1ピーク電流測定ステップS105、S106と、コイルに対して、回転子の永久磁石が形成する磁束の向きと逆向きの磁束が生じるようにパルス電圧を印加し、コイルに流れる電流値のピーク値Ip−を測定する第2ピーク電流測定ステップS108、S109と、ピーク値Ip+とピーク値Ip−との絶対値の差に基づいて永久磁石の劣化の有無を判定する判定ステップS110とを有する。
(もっと読む)
回転角検出装置
【課題】複数の正弦波信号のうちの1つの正弦波信号に固着異常が発生した場合でも、磁極の移り変わりを正確に検出できるようになる回転角検出装置を提供する。
【解決手段】ロータ1の周囲には、3つの磁気センサ21,22,23が、ロータ1の回転中心軸を中心として、所定角度の角度間隔をおいて配置されている。磁気センサ21,22,23からは、所定の位相差120°を有する正弦波信号が出力される。回転角演算装置20は、第1の出力信号V1の磁極の移り変わりを、次のようにして検出する。具体的には、回転角演算装置20は、第2の出力信号V2の今回値および第3の出力信号V3の今回値のうち、その前回値と今回値との差の絶対値が大きい方の値と、第1の出力信号V1の前回値と、第1の出力信号V1の今回値とに基づいて、第1の出力信号V1の磁極の移り変わりを検出する。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置10では、トルク軸電圧が印加されているにも関わらず、トルク軸電流が第1閾値以下の状態において、相間電圧がゼロボルト近傍になっている組合せの相以外の相を異常相として検出する。
(もっと読む)
電気機械装置
【課題】電気機械装置の効率的な制御を行う。
【解決手段】電機機械装置であって、電磁コイルと、前記電磁コイルにPWM駆動信号を供給するためのPWM駆動回路と、前記PWM駆動回路を制御する制御部と、を備え、前記制御部は、前記電磁コイルに前記PWM駆動信号を供給する区間としての励磁区間を設定する第1の制御と、前記PWM駆動信号のデューティ比を変更する第2の制御と、を実行し、前記制御部は、前記第1の制御において、前記励磁区間の中心の位相を、前記電磁コイルに生じる逆起電力の最大値が生じる位相の値よりも早める進角制御を行うとともに、前記第2の制御において、正弦波を模擬するPWM駆動信号を生成する際のゲインを100%としたときに、100%を越えるゲインを実現するように前記デューティ比を増大させる、電機機械装置。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置では、q軸電圧が印加されているにも関わらず、q軸電流が第1閾値以下である基準電気角を算出し、前記基準電気角に基づいて異常相を判定する。
(もっと読む)
回転機の制御装置
【課題】出力電圧ベクトルのノルムを要求トルクに応じて一義的に定めるものにあっては、これに基づき永久磁石の磁束異常の有無を判断することが困難なこと。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータIVの出力電圧ベクトルのノルムを設定する。位相設定部28では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部38では、ノルム設定部30によって設定されたノルムVnと、位相設定部28によって設定された位相δとに基づき操作信号を生成してインバータIVに出力する。位相δの値に基づき、モータジェネレータ10の永久磁石の異常の有無を判断する。
(もっと読む)
モータ駆動制御装置
【課題】故障検出又は回路保護を効率的に実現する。
【解決手段】本モータ駆動制御装置は、スイッチングを行って電源からモータへ電力供給を行うための第1の信号を出力するスイッチング素子と、スイッチング素子のスイッチングを制御するための第2の信号を出力する駆動制御回路と、第1の信号の論理レベルと第2の信号の論理レベルとに矛盾が存在するか判断し、矛盾が存在している場合にはエラー信号を出力する判断部とを有する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】駆動回路を構成する各スイッチング素子に生じた短絡異常と区別して、精度良くセンサ異常の発生を検出することのできるモータ制御装置を提供すること。
【解決手段】異常検出部は、検出される山読み電流値Ix_hpの絶対値及び各谷読み電流値Ix_lpの絶対値の少なくとも何れかが、その電流検出の限界値に対応して設定された第1の閾値I1を超えるか否かを判定する。また、異常検出部は、その検出される相電流値Ixの絶対値が「0(ゼロ)」に対応して設定された第2の閾値I2よりも小さいか否かを判定する。そして、これら二つの判定条件を共に満たす相がある場合には、当該相にセンサ異常(張り付き異常)が発生したものと判定する。
(もっと読む)
81 - 100 / 821
[ Back to top ]