
Fターム[5H560AA08]の内容
無整流子電動機の制御 (40,007) | 用途 (2,430) | 電動車両 (821)
Fターム[5H560AA08]に分類される特許
141 - 160 / 821
交流電動機の制御装置および制御方法
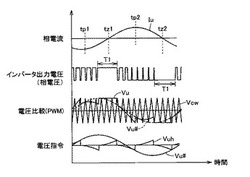
【課題】インバータを用いた交流電動機制御において、効率を低下させることなくインバータのスイッチングによるサージ電圧を抑制する。
【解決手段】交流制御指令(Vu)とキャリア信号(Vcw)との電圧比較に基づいて、インバータ各相のスイッチング素子のオンオフが制御される。交流制御指令(Vu)は、三相変調のための本来の交流電圧指令(Vu♯)に、3次高調波電圧(Vuh)を重畳することによって得られる。3次高調波電圧(Vuh)は、相電流の特定タイミング(tp1、tp2)を含む所定の電流位相期間(T1)において、当該相でのスイッチング素子のオンオフが固定されるように設定される。
(もっと読む)
電動パワーステアリング装置

【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの異音の発生することがなく、且つ操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、電流指令値が負値からゼロクロス近傍の所定範囲に属する値になった場合には、正値の前記デッドタイム補償量を各相DUTY指令値に加算し、電流指令値が正値からゼロクロス近傍の所定範囲に属する値になった場合には、負値の前記デッドタイム補償量を各相DUTY指令値に加算する。
(もっと読む)
ブラシレスモータの駆動装置
【課題】モータ(巻線)のばらつきや温度環境などに因る通電モードの切り替えタイミングのずれを抑制でき、以って、効率の低下や脱調の発生を抑制できるブラシレスモータの駆動装置を提供する。
【解決手段】非通電相(開放相)の電圧と電圧閾値とに基づいて通電モードを順次切り替えるブラシレスモータの駆動装置において、1つの通電モードを継続させることで、ブラシレスモータを通電モードの切り替えを行う角度位置に位置決めし、その後に次の通電モードへの切り替えを行い、該通電モードの切り替え直後における非通電相の電圧を検出する。そして、検出した非通電相の電圧を、更に次の通電モードへの切り替えるときの判断に用いる電圧閾値として学習する。
(もっと読む)
駆動装置
【課題】簡単な構造で、モーターの起動時もモーターを適切に回転させることができる駆動装置を提供する。
【解決手段】ローターとステーターとの一方に永久磁石を用いるモーターと、モーターに三相の電流を供給するインバータと、モーターの回転角を検出するアブソリュートエンコーダと、モーターの回転角を推定する回転角度推定回路と、アブソリュートエンコーダで検出した回転角及び前記回転角度推定回路で推定した回転角の少なくとも一方に基づいてインバータからモーターに供給する電流を制御する制御器と、を有し、制御器は、モーターの回転速度が閾値以下の場合は、アブソリュートエンコーダで検出した回転角に基づいてインバータから前記モーターに供給する電流を制御すること。
(もっと読む)
電動機の駆動制御方法
【課題】モータが負荷保持停止位置で停止する時間を各相コイルで均一になるように駆動制御することで、各相コイルの発熱温度を均一化させた電動機の駆動制御方法を提供する。
【解決手段】制御回路7はモータコイル3に通電状態で、かつロータ2が負荷保持状態で回転停止させたロータ2の回転停止位置である負荷保持停止位置を、前回ロータ2が回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータ2を回転させた位置で停止させる。
(もっと読む)
三相交流電動機の駆動制御装置
【課題】位相制御上の要求に対して適切な通電制御を行いつつ、電流の急激な変動を抑える。
【解決手段】モータ駆動制御装置は、三相モータの駆動制御を180°通電モードにより行い、算出した位相角度φ1,φ2によって通電パターンの出力タイミングを進角制御する。位相切り替わりタイミング(時刻t1)において60°以上の位相角度の変化が生じた場合、全相のMOSFETを一時的にOFFにさせ、切り替わり後の位相角度φ2で通電パターンの出力タイミングを進角制御する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】実回転角に基づく回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することが可能なモータ制御装置を提供すること。
【解決手段】通電不良検出部は、検出対象相である特定相(X相)が通電状態にあるべき相であるにもかかわらず(|Ix*|>I0、ステップ603:YES)、当該特定相の相電流値Ixが非通電状態を示し(|Ix|<I2、ステップ604:YES)、且つ誘起電圧の影響によりモータ電流が極小化する高速回転領域に対応して設定された閾値Cよりも加算角θaが小さいと判定した場合(θa<C、ステップ605:YES)には、特定相であるX相に通電不良の発生を示す異常が生じていると判定する(ステップ606)。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】実回転角に基づく回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することが可能なモータ制御装置を提供すること。
【解決手段】通電不良検出部は、誘起電圧二乗和Esq_αβが、所定の閾値E1を超えるか否かを判定する(ステップ602)。また、モータ回転角速度推定値ωm_eが所定の閾値ω1よりも低いか否かを判定する(ステップ603)。そして、その誘起電圧二乗和Esq_αβが最高速回転状態に対応する最大領域にあるにもかかわらず(Esq_αβ>E1、ステップ602:YES)、モータ回転角速度推定値ωm_eは非回転状態を示す最小領域にある(ωm_e<ω1、ステップ603:YES)という矛盾を検知した場合に、何れかの相に通電不良の発生を示す異常があると判定する(ステップ604)。
(もっと読む)
制御装置
【課題】専用のモニタ信号端子を設けること無く、自由度の高い様々なモニタ信号を出力可能な制御装置を提供する。
【解決手段】通信線Sを介して送信される信号に基づいて制御対象を制御する制御装置20であって、所定の信号入力を検知すると前記制御対象を制御する制御モードから検査モードに移行するモード切替部20aと、前記モード切替部により前記検査モードに移行すると、前記通信線を介して送信または受信する信号の信号形態を、前記制御モードで用いる第1信号形態から第1信号形態とは異なる第2信号形態に変更して通信を行なう通信部20bと、を備えている。
(もっと読む)
回転機の制御装置
【課題】インバータIVとモータジェネレータ10との間の電気経路が断線するなどの異常を診断できないこと。
【解決手段】ノルム設定部32では、要求トルクTrと電気角速度ωとに基づきインバータIVの出力電圧ベクトルのノルムVnを設定する。位相設定部30では、要求トルクTrと推定トルクTeとの差を入力とする比例要素および積分要素の出力同士の和に基づきインバータIVの出力電圧ベクトルの位相δを設定する。操作信号生成部34では、ノルムVnや位相δ等に基づきインバータIVの操作信号を生成して出力する。位相δの値に基づき上記断線等の異常の有無を診断する。
(もっと読む)
モータ及びそれを用いたポンプ並びに液体循環装置
【課題】待機電力を低減可能なモータを簡単な構成で安価に実現するととともに、このモータを備えたポンプ並びに液体循環装置を提供する。
【解決手段】モータは、モータコイル5と、モータコイル5に電力を供給するモータ駆動用電源1と、モータコイル5の駆動を制御する制御回路3と、モータ駆動用電源1から電力供給を受けて制御回路3に動作電力を供給するレギュレータ2とを備える。モータ駆動用電源1とレギュレータ2との間には、スイッチSW1のON/OFF操作に応じて入力される外部信号によってON/OFF状態が切り替えられるスイッチSW2が設けられており、スイッチSW2のON/OFF状態に応じてレギュレータ2の出力がON/OFFされるようになっている。その結果、レギュレータ2の出力がOFFになっている状態では、待機電力を低減することができるのである。
(もっと読む)
モータ制御装置
【課題】モータジェネレータの減磁と電流センサの異常とを識別する。
【解決手段】電流指令値Id*,Iq*と電流センサ125で検出された電流値Id,Iqとの偏差に応じて電圧指令値Vs,Vqを生成しMG2を駆動する。制御モード判定器140gは、Vqが所定のしきい値より低下したか否かを判定し、低下した場合にはさらにVqの挙動を監視し、Vqが定常的であればMG2の減磁であると識別し、振幅変動があれば電流センサ125の異常と識別する。
(もっと読む)
モータ制御装置
【課題】ブラシレスモータのロータの回転角を検出するために用いられる2つの正弦波信号のうちのいずれか一方に異常が発生した場合においても、正常な方の正弦波信号に基づいて、ブラシレスモータを駆動することができるモータ制御装置を提供する。
【解決手段】第2の回転角演算部33は、2つの正弦波信号V1,V2のうちの一方に異常が発生した場合に、正常な正弦波信号から予測される第1の回転角候補および第2の回転角候補のうちの一方の回転角候補を、第2の回転角θ2として演算する。ゲイン演算部35は、第2の回転角演算部33によって演算された回転角θ2に基づいて、ブラシレスモータ3によって本来発生されるべきトルクと逆方向のトルクが発生されないように、指示電流値Idq*に乗算されるべき第2ゲインG2を演算する。
(もっと読む)
モータ制御装置
【課題】低速回転領域における正弦波状の変調波信号の生成を改善し、なおかつ正弦波歪みの少ない変調波信号を生成できるモータ制御装置を提供すること。
【解決手段】モータ10のロータ12に複数の磁極を設け、前記ロータ12の回転に伴う磁極位置θreの変化に伴い磁極位置検出信号を出力する複数の磁気センサを前記ロータ12の対向位置に配置し、前記磁気センサのそれぞれの磁極位置検出信号の変化及び配置位置に基づいて前記ロータ12の磁極位置θreを検出し、当該磁極位置θreに基づいて正弦波状の変調波信号を生成し、前記モータの正弦波駆動を行うモータ10の制御装置2において、前記磁極位置検出信号が変化する間の磁極位置を補間する磁極位置補間器95を備える構成とした。
(もっと読む)
モータ制御装置
【課題】直流電源に接続されたインバータ及び平滑コンデンサと、インバータで駆動される交流モータとを備えたモータ制御システムにおいて、交流モータで電気エネルギを消費して平滑コンデンサの電荷を放電する際に交流モータの意図しない回転を抑制する。
【解決手段】平滑コンデンサ33に蓄えられた電荷を放電する際に、ロータ回転位置センサ34で検出したロータ回転位置と目標位置との偏差を小さくするように交流モータ12の指令電圧ベクトルを制御する回転位置F/B(フィードバック)制御を実行する。その際、放電開始時に回転位置センサ34で検出したロータ回転位置を目標位置として設定することで、回転位置F/B制御によって、交流モータ12のロータ回転位置を放電開始時のロータ回転位置付近に維持する。これにより、交流モータ12をほとんど回転させないようにすることが可能となり、交流モータ12の回転による不具合を確実に防止する。
(もっと読む)
電動機の制御装置および電動機制御システム
【課題】キャリア周波数の切り替わり時の外乱成分の誤推定を抑制し、電流応答特性の低下を抑制することである。
【解決手段】制御ユニットは、キャリアのキャリア周波数に準じた周期、具体的には、キャリアの山と谷とのそれぞれのタイミングで制御演算を行っている。そして、制御ユニットを構成する外乱推定部は、キャリア周波数が切り替えられた場合、このキャリア周波数が切り替わった際の制御演算よりも1周期後の制御演算において制御演算周期に依存する外乱推定用の制御定数の更新を行う。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することのできるモータ制御装置を提供すること。
【解決手段】通電不良検出部は、通電状態にあるべき特定相(X=U,V,W、|Ix*|>I2)の相電流値が非通電状態を示す値(|Ix|<I1)であり、且つ他相の相電流値が通電状態を示す値(|Iy|>I3)である場合には、その特定相に通電不良の発生を示す異常があると判定する。
(もっと読む)
モータ制御装置及びモータ駆動システム
【課題】dq座標系と異なる座標系を推定するシステムにおいて位置推定誤差を抑制する。
【解決手段】モータの電機子巻線の鎖交磁束のδ軸成分であるδ磁磁束Φeamδを対象物理量として推定し、δ磁磁束をゼロに向かわせることで、制御軸であるγ及びδ軸をd及びq軸と異なるdm及びqm軸に追従させる。モータへの印加電圧のγ軸成分(vγ*)、γ軸電流による電機子巻線での電圧降下(Raiγ)及び回転子の回転(ωe)によって発生するδ軸方向の磁束(vγ*−Raiγ/ωe)と、δ軸電流によって発生する磁束のδ軸成分(Lqmiδ)との和を、演算部31にて求める。一方で、γ軸電流によって発生する磁束のδ軸成分(Ldmiγ)を乗算部32にて求め、演算部31の出力値と乗算部32の出力値を加算することでδ軸磁束Φeamδを導出する。
(もっと読む)
ハイブリッド車両
【課題】走行に悪影響を及ぼすことなく、磁極位置補正量を求める学習処理を行う行うことが可能なハイブリッド車両を提供する。
【解決手段】位相補正器30は、内燃機関ENGが駆動し、第1クラッチC1が接続状態であり、且つ第1噛合機構SM1により第1入力軸4と出力軸3aとが選択的に連結されて、当該車両が走行する第1の走行状態では、磁極補正角θofsを第1の学習処理により求める。位相補正器30は、内燃機関ENGが駆動し、第2クラッチC2が接続状態であり、且つ第2噛合機構SM2により第2入力軸5と出力軸3aとが選択的に連結されて、当該車両が走行する第2の走行状態では、磁極補正角θofsを第2の学習処理により求める。
(もっと読む)
電動機駆動用電力変換装置
【課題】交流電動機における過電流や過大なトルク脈動の発生を抑止すること。
【解決手段】第二の制御部100は、トルク指令T*に基づいて電動機6の電流指令を生成する電流指令生成部10と、電流指令に基づいて電動機6へ印加すべき電圧振幅指標(変調率PMF)を演算する電圧振幅指標演算部150と、変調率PMFと電動機6の周波数FINVとに基づいて電流指令を調整するための電流指令調整量dVを生成する電流指令調整部80と、直流電圧EFCに基づいて電源2f成分の脈動成分を抑制するための脈動抑制信号を生成する脈動抑制信号生成部を含み、インバータ2へのゲート信号(PWM信号)を生成する電圧指令/PWM信号生成部50と、を備え、電流指令調整量dVにより調整された電流指令と脈動抑制信号とを含む制御信号によりPWM信号を生成する。
(もっと読む)
141 - 160 / 821
[ Back to top ]