
Fターム[5H560AA08]の内容
無整流子電動機の制御 (40,007) | 用途 (2,430) | 電動車両 (821)
Fターム[5H560AA08]に分類される特許
21 - 40 / 821
ブラシレスモータ制御方法及びブラシレスモータ制御装置並びにブラシレスモータ並びに電動パワーステアリング装置
【課題】d軸方向とq軸方向のインダクタンスに差があるモータにおいて、高負荷側のトルクだれを防止し、モータのトルク向上や小型化を図る。
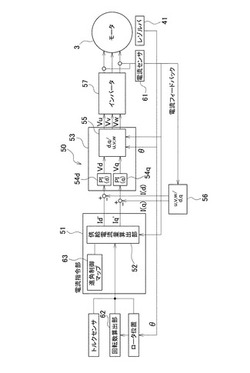
【解決手段】ブラシレスモータ3は、多角形状の断面を有するロータコアと、ロータコアの外周の各辺部分に取り付けられたセグメントマグネットとを備えるロータコアを有し、d軸方向のインダクタンスとq軸方向のインダクタンスが異なる。ブラシレスモータ3の制御装置50は、電流センサ61と、負荷状態に応じて巻線電流値を算出する電流指令部51とを有する。電流指令部51は、電流センサ61にて検出した相電流値に基づいて、電機子反作用の影響によって理論トルクに対して出力トルクが減少する高負荷領域にて進角制御を行い、電機子巻線に対する供給電流にd軸電流Id’を付加する供給電流量算出部52と、相電流と進角値との関係が示された進角制御マップ63を有する。
(もっと読む)
ブラシレスモータの駆動装置、ブラシレスモータの始動方法、ブラシレスファンモータの駆動装置、及びブラシレスファンモータの始動方法

【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスファンモータの駆動装置、及び始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
内接ギアポンプユニット
【課題】低回転から高回転まで、ロータの回転角度をより高精度に検出することが可能な内接ギアポンプユニットを提供する。
【解決手段】インナギア31とアウタギア32と電動モータとモータ制御手段60と磁界検出手段51Aとを備え、電動モータは周方向に複数の磁極が配置されたロータ33と複数のコイルとを有し、モータ制御手段は、コイルに通電するための通電手段と、通電していないコイルに発生する誘起電圧を検出可能な誘起電圧検出手段と、を各コイルに対応させて有しており、出力軸の回転時において、磁界検出手段からの検出信号に基づいて検出した第1検出ロータ角度と、出力軸の回転時において、通電していないコイルに対応する誘起電圧検出手段からの検出信号に基づいて検出した第2検出ロータ角度とを求め、第1検出ロータ角度と第2検出ロータ角度に基づいて補正した第1検出ロータ角度に基づいてそれぞれのコイルへの通電を制御する。
(もっと読む)
電動車両の制御装置
【課題】複数のモータが同一の駆動軸にトルクを付加する電動車両において、必要なトータルトルクに対して、それぞれのモータのトルク分担を少ない計算負荷で適切に決定することが可能な技術を提供する。
【解決手段】本明細書は、同一の駆動軸にトルクを付加する2以上のモータを備える電動車両の制御装置を開示する。それぞれのモータは、制御方式が切替え可能である。その制御装置は、必要なトータルトルクから、それぞれのモータのトルク分担を計算する際に、それぞれのモータの制御方式の組み合わせに応じて、トルク分担の計算に用いるトルクマップを選択し、必要なトータルトルクと、選択されたトルクマップを用いて、それぞれのモータのトルク分担を計算する。
(もっと読む)
電動機の制御データ更新方法と制御装置
【課題】電動機の個体差に応じてマップのデータを最適化できるようにする。
【解決手段】トルクと駆動電流及び電流位相角との関係を示すマップを参照して、目標トルクが出力されるように同期電動機の駆動装置を制御しつつ(S1)、当該同期電動機の出力軸に取り付けたトルク測定器で実トルクを測定する(S2)。この実トルクの測定結果に基づいて、目標トルクが出力されているか否か判断し(S3)、目標トルクが出力されていない場合に、現在の駆動電流の電流位相角を変更してトルク測定器で実トルクを測定することにより、当該測定トルクが最適値になる電流位相角を決定し(S4〜S6)、この決定した電流位相角に基づいてマップを更新する(S7)、電動機の制御データ更新方法を提案する。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
電動機の制御装置
【課題】電動機の状態に係るパラメータの補正、又は、電動機若しくは電動機に係るパラメータを検出する手段の状態の判定を高精度に行うことができる電動機の制御装置を提供すること。
【解決手段】制御装置は、互いの回転子が動力伝達可能に接続される2つの電動機と、回転子の回転状態に伴い変化する、電動機の状態又は電動機に付属する補機の状態を検出する状態検出部と、2つの電動機の各動作を制御する制御部とを備える。制御部は、2つの電動機の一方の電動機である第1の電動機を駆動制御し、第1の電動機が駆動することで2つの電動機の他方の電動機である第2の電動機が回転動作しているときに状態検出部が検出した、第2の電動機の状態又は第2の電動機に付属する補機の状態に基づいて、第2の電動機の状態に係るパラメータの補正、又は、第2の電動機の状態若しくは第2の電動機に付属する補機の状態を検出する状態検出部の状態の判定を行う。
(もっと読む)
駆動制御装置、及び、駆動制御方法
【課題】電圧制御方式の切り替え時における電動機の制御性を改善した駆動制御装置、及び、駆動制御方法を提供する。
【解決手段】駆動制御装置は、電動機の駆動制御に用いる第1電圧指令を第1方式で生成する第1領域と、前記駆動制御に用いる第2電圧指令を第2方式で生成する第2領域との境界を前記電動機の回転数とトルク指令値とで表すマップを格納する格納部37と、前記回転数と前記トルク指令値とで決まる前記電動機の動作点が前記境界を含む所定の切替領域内にある場合は、前記第1方式で第1電圧指令を生成するとともに、前記第2方式で第2電圧指令を生成する電圧指令生成部と、前記第2方式から前記第1方式への切り替えが必要な場合は前記第1電圧指令を用いて前記電動機の駆動制御を行い、前記第1方式から前記第2方式への切り替えが必要な場合は前記第2電圧指令を用いて前記電動機の駆動制御を行う駆動制御部30とを含む。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
ハイブリッド車両の制御方法
【課題】モータトルクの制御精密度を向上させ、レゾルバを使用する車両の生産工程時間および費用を減らすことができるハイブリッド車両の制御方法を提供する。
【解決手段】本発明のハイブリッド車両の制御方法は、駆動モータの回転位置を検知するレゾルバのオフセット候補値を設定されたデータに基づいて決定するオフセット候補値決定段階、前記駆動モータを0(zero)電流制御するゼロ電流制御段階、前記駆動モータがゼロ電流制御されると判断されれば、前記駆動モータに発生する電圧を検知する電圧検知段階、前記電圧値検知段階で検知される電圧値の平均値を演算する平均値演算段階、および、前記オフセット候補値と前記平均値を利用して最終オフセット値を演算する最終オフセット値演算段階、を含むことを特徴とする。
(もっと読む)
モータ制御装置
【課題】電動車両がスリップを起こした場合にモータ50の過電流を抑制すると共に、トルクの減少を抑制する。
【解決手段】電動車両を駆動するモータ50の回転数Nとトルク指令値Trqcomに応じてモータ50に印加する電圧波形を矩形波形又は非矩形波形に設定するマップを含み、マップに基づいてモータ50を制御する電動車両のモータ制御装置であって、電動車両がスリップしたと判定した際に、マップの矩形波形を印加する領域の中に矩形波形を印加することを禁止する矩形禁止領域Aを設定し、モータ50の回転数Nとトルク指令値Trqcomとが矩形禁止領域Aに入った場合に、モータ50に印加する電圧波形を矩形波形から非矩形波形に切り替えるとともに、モータ50の制御方式を最大トルク制御から弱め界磁制御に切り替える。
(もっと読む)
交流電動機の駆動装置およびそれを搭載する車両、ならびに交流電動機の制御方法
【課題】変調PWM制御および正弦波PWM制御を切換えて制御する交流電動機の駆動装置において、交流電動機の回転速度が急変した場合の緊急切換動作時におけるトルク急減を抑制する。
【解決手段】車両100は、ECU300によってPWM制御を用いてインバータ130が制御されてモータジェネレータ140を駆動することによって走行する。ECU300は、正弦波PWM制御および過変調PWM制御を含む複数の制御モードを切換えてインバータ140を制御する。ECU300は、過変調PWM制御を実行中に、駆動輪160がスリップ状態からグリップ状態に変化することに伴って電流が急増した場合に、過変調PWM制御から正弦波PWM制御に強制的に切換えるとともに、正弦波PWM制御における変調率の上限値を緩和して、正弦波PWM制御において通常時よりも大きなトルクが出力できるようにする。
(もっと読む)
電力変換装置の制御装置
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】PMW制御中の三相同期モータに発生するトルクの変動や異音を抑制することが可能な、モータ制御装置及びモータ制御方法を提供する。
【解決手段】三相電圧指令値(VUCMD、VVCMD、VWCMD)をパルス幅変調で制御して三相同期モータ2を制御するモータ制御装置1であって、三相同期モータ2に供給されるQ軸電圧VQ及びD軸電圧VDに基づいて、三相電圧(VU、VV、VW)を算出するDQ‐UVW変換部22と、DQ‐UVW変換部22が算出した三相電圧(VU、VV、VW)を三乗した値を、Q軸電圧VQとD軸電圧VDとの二乗和で除算して、三次高調波を演算し、さらに、演算した三次高調波を三相電圧(VU、VV、VW)に重畳して、三相電圧指令値(VUCMD、VVCMD、VWCMD)を演算する三次高調波重畳部24を備える。
(もっと読む)
電気モータ
【課題】電気モータの複数のコイルを適切に冷却する。
【解決手段】電気モータは、モータの磁場を発生するように配置された一つまたは複数のコイルセットを含む。電気モータは、電流制御のためにコイルのそれぞれのコイルサブセットに接続された複数の制御装置も含む。同様の構成が、発電機についても提案される。電気モータまたは発電機用のコイル取り付けシステムは、モータのコイルを巻き取り可能に受け入れる一つまたは複数のコイル歯と、複数のコイル歯を取り外し可能に受け入れる後部とを含む。それぞれのモータで独立して駆動される複数の車輪を有する車両のトラクション制御システムおよび方法が提供される。各車輪が車両のサスペンションアームに取り付けられそれぞれのモータで独立して駆動される複数の車輪を有する車両のサスペンション制御システムおよび方法が提供される。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の検出値をフィードバック制御するための操作量としての指令電圧の1電気角周期に渡る積分値をゼロにフィードバック制御する場合、電気角の検出値に誤差が生じることで、電流の検出値に重畳されたオフセット誤差を適切に補正できないこと。
【解決手段】モデル予測制御部30では、モデル予測制御によってインバータINVの今回の操作状態を表現する電圧ベクトルViを選択する。積分値算出部40では、電圧ベクトルViを入力とし、各相の印加電圧の積分値Δvu,Δvv,Δvwを算出する。補正部44u,44v,44wでは、これらをゼロにフィードバック制御すべく実電流iu,iv,iwを補正する。
(もっと読む)
21 - 40 / 821
[ Back to top ]