
Fターム[5H560DA07]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | エンコーダ、パルスジェネレータ (247)
Fターム[5H560DA07]の下位に属するFターム
Fターム[5H560DA07]に分類される特許
1 - 20 / 219
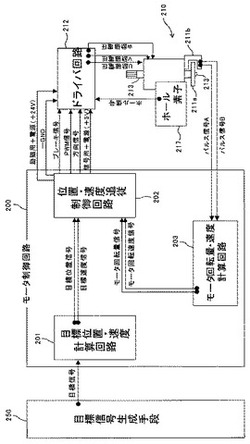
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】ドライバ回路に入力される回転センシング信号へのノイズの混入に起因するモータ回転の不安定化と、モータ起動時のギヤ歯の衝突に起因するギヤの寿命低下とを抑えつつ、搬送モータによって第1搬送ローラ16aを迅速に加速する。
【解決手段】DCブラシレスモータからなる搬送モータ210の回転量を検知するモータエンコーダ211と、ドライバ回路212とを搬送モータ210に搭載し、モータ起動時にて、搬送モータ210の回転速度を第1加速特性で加速させるように搬送モータ210を駆動しながら、モータエンコーダ211による検知結果と第1加速特性とに基づいて把握したタイミングが到来した後に、搬送モータ210の回転速度を第1加速特性よりも加速性に優れた第2加速特性で加速させるように搬送モータ210を駆動する加速度変更処理を実施するようにモータ制御回路200を構成した。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置

【課題】DCブラシレスモータを駆動源として用いて被駆動体の速度を自在に調整するとともに、回転センシング信号へのノイズの混入に起因するモータ回転の不安定化、及び負荷変動に起因する第1搬送ローラ16aの速度不安定化を抑える
【解決手段】DCブラシレスモータからなる搬送モータ210の励磁コイルの切り替えタイミングをドライバ回路212に把握させるために搬送モータ210の回転量を検知するホール素子217とは別に、同回転量をホール素子217よりも高精度に検知するモータエンコーダ211を搬送モータ210に搭載するとともに、ドライバ回路212を搬送モータ210に搭載し、モータエンコーダ211による検知結果に基づいてドライバ回路212からコイルに供給される励磁電圧の量を調整することで、搬送モータ210の回転速度を調整する速度調整処理を実施するように、モータ制御回路210を構成した。
(もっと読む)
駆動装置及びそれを備えた画像形成装置
【課題】画像品質を向上させることができる駆動装置及びそれを備えた画像形成装置を提供する。
【解決手段】駆動装置は、位置・速度追従制御器130を備え、位置・速度追従制御器130は、PID制御器140と、減算器131と、PWM回路133と、ゲイン設定部134と、ゲイン設定指示部135と、を備え、ゲイン設定指示部135は、DCモータ101がホールド状態になった時刻以降において、位置偏差が予め定められた閾値以下、かつ、一定時間経過後に、ゲイン設定部134にホールド時ゲインを設定させ、スルーアップ制御が開始された場合に、ゲイン設定部134に駆動時ゲインを設定させる構成を有する。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
ブラシレスモータを始動させる方法
【課題】ロータ位置センサの位置の公差に厳しい精度が要求されない、ブラシレスモータの始動方法を提供する。
【解決手段】本発明は、ブラシレスモータを始動させる方法に関する。ブラシレスモータ(1)は、ロータ(2)と、少なくとも1つの相巻線(4)を有するステータ(3)と、ロータ位置センサ(5)を有する。上記方法は、巻線(4)を励起させ、ロータ位置センサ(5)が出力した信号を感知することを含む。信号のエッジを第1期間の間に感知した場合には、エッジに応答して、巻線(4)を整流する。信号のエッジを第1期間の間に感知しない場合には、第1期間の終了時に巻線(4)を整流し、信号を感知し、第2期間の間に感知した信号の2つのエッジのうちの第2のエッジに応答して巻線(4)を整流する。
(もっと読む)
電動車両用駆動モータ
【課題】低速回転域で所定のトルクを確保し高速回転域で逆起電力の発生を低減すると共に、低速回転域および高速回転域で電流の流れるタイミングを適正に設定できるようなシンプルな構成の電動車両用駆動モータを提供する。
【解決手段】電動車両用駆動モータは、2n個の磁極を有するマグネットを備えるロータ、ロータの各磁極に対向し周面に6m個の突起部が有するステータコア24、回転検出部、電流制御部、駆動回路を含む。ステータコア24は周方向に等間隔で形成される3m個の第1突起部群と3m個の第2突起部群とを含み、第1突起部群を構成する第1突起部36と第2突起部群を構成する第2突起部38とが交互に配置される。第1突起部36には第1コイルが巻回され、第2突起部38には第2コイルが巻回される。第2突起部群と第1突起部群とは、第2突起部38が当該第2突起部38を挟む2つの第1突起部36のうち一方に偏って配置される。
(もっと読む)
駆動装置及びそれを備えた画像形成装置
【課題】ホールド制御時に発生するモータ振れを従来のものよりも短時間で抑制することができる駆動装置及びそれを備えた画像形成装置を提供する。
【解決手段】駆動装置は、位置・速度追従制御器130を備え、位置・速度追従制御器130は、PID制御器140と、減算器131と、PWM回路133と、ゲイン設定部134と、ゲイン設定指示部135と、位置偏差補正部136と、を備え、ゲイン設定指示部135は、減算器131が出力する位置偏差が予め定められた±eパルス相当であり、かつ、その位置偏差がホールド状態になったホールド時から予め定められたt時間継続した場合は、ゲイン設定部134に、位置偏差をキャンセルするために予め実験により取得されたホールド時ゲインを設定させる構成を有する。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子により、モータに供給される各相の電流をより高い精度で検出できるモータ制御装置を提供する。
【解決手段】実施形態によれば、モータ制御装置は、直流を多相交流に変換する電力変換器を介してモータを駆動し、モータのロータ位置に追従するように通電パターンを生成する。通電信号生成手段は、通電制御周期内で電力変換器の直流側に接続され電流検出素子に発生する信号が少なくとも2相の電流に対応するよう通電パターンを生成し、電流検出手段は、電流検出素子に発生した信号と通電パターンとに基づき相電流を検出する。電流補正手段は検出された電流に含まれる誤差を補正し、電流制御手段は入力される電流指令値と補正された電流とに応じて通電信号生成手段が通電パターンを生成するための電流制御を行い、制御切り替え手段は、補正値演算指令を出力すると共に、前記指令の出力状態に連動して電流制御手段が電流制御を行う周期を切り替える。
(もっと読む)
電力変換装置の制御装置
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
モータ駆動装置及びモータの駆動制御方法
【課題】安価な回路構成で一般的な制御方法による起動を行うとともに、エラー発生時には適切なリカバリー動作を実現する。
【解決手段】モータの駆動開始時には、第1の駆動手段によってモータを駆動した後、第2の駆動手段によってモータを駆動するように、第1の駆動手段と第2の駆動手段とを切り替える制御手段と、を有し、第1の駆動手段は、所定の駆動周波数でオープンループ制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の駆動周波数よりも低い駆動周波数でモータを駆動し、第2の駆動手段は、所定の加速度でフィードバック制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の加速度よりも低い加速度でモータを駆動する。
(もっと読む)
永久磁石同期モータの制御装置
【課題】モータを駆動しつつモータ定数を迅速に同定し、電流検出手段のオフセット値を同定して除去可能とする。
【解決手段】モータの速度及びd,q軸電圧を入力としてd,q軸推定電流を演算する電流シミュレータ9と、d軸検出電流が零となるようにモータを定速制御し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数の偏差が零となるようにシミュレータ9の自己インダクタンスノミナル値を調整して自己インダクタンスを同定し、d軸検出電流が所定値となるようにモータを制御し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数の偏差が零となるようにシミュレータ9の電機子抵抗ノミナル値を調整して電機子抵抗を同定し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数を同定し、d軸推定電流と検出電流との偏差、及び、q軸推定電流と検出電流との偏差から、電流検出手段のオフセット値を同定する同定手段10と、を備える。
(もっと読む)
モータ磁極位相の調整方法
【課題】
ロータの位相調整を行う場合に、ロータの安定点に対するCW及びCCW両方向からの寄り付き動作の駆動開始点を、CW及びCCW両方向のそれぞれ機械角180゜以内の所定角度から行うようにすると共に、寄り付き動作の駆動開始点を安定点の正逆位相を回避する準備駆動を行うことにより、ロータの正確な安定点を求めるようにしたモータ磁極位相の調整方法を提供する。
【解決手段】
ロータを安定点に対するCW方向の機械角180゜以内の所定角度からCCW方向の安定点へ回転駆動する工程A1と、工程A1における駆動距離B1を計測する工程A2と、ロータを安定点に対するCCW方向の機械角180゜以内の所定角度からCW方向の安定点へ回転駆動する工程A3と、工程A3における駆動距離B2を計測する工程A4と、駆動距離B1及びB2に基づいて励磁原点を求める工程A5とによりモータ磁極位相の調整を行う。
(もっと読む)
永久磁石同期電動機の永久磁石の不可逆減磁が発生したか否かを検出する制御装置
【課題】永久磁石同期電動機の駆動軸の動作範囲が制限された場合でも永久磁石同期電動機の磁石の不可逆減磁が発生したか否かを適切に検出することができる制御装置を提供する。
【解決手段】正弦波状指令信号生成部17は、永久磁石同期電動機3へのトルク指令に対する正弦波状指令信号を生成する。推定トルク定数計算部23は、正弦波状指令信号の複数周期に亘る同一の動作状態での複数の電流値と複数の加速度値から取得した電流代表値及び加速度代表値と、永久磁石同期電動機3に関連する予め設定されたイナーシャとから、永久磁石同期電動機3に関連する推定トルク定数を計算する。減磁検出部24は、推定トルク定数と永久磁石同期電動機3に関連する予め設定されたトルク定数との差分に基づいて、永久磁石同期電動機3の永久磁石34a,34b,34c,34dに不可逆減磁が発生したか否かを検出する。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
埋込型永久磁石同期電動機の駆動装置
【課題】埋込型永久磁石同期電動機(IPMSM)の駆動装置が開示される。
【解決手段】埋込型永久磁石同期電動機(IPMSM)の回転子の位置及び速度を測定する検出部を含むシステムにおいて、弱磁束制御の第1領域の第1電流指令を受信して、IPMSMを駆動するための本発明の装置は、過変調された電圧情報を修正部に伝達する帰還部と、回転子速度と過変調された電圧情報を用いて、第1電流指令を弱磁束制御の第2領域の第2電流指令に修正する修正部と、第2電流指令を制御して、電圧を出力する制御部と、制御部の出力をインバータ部が合成可能な最大電圧に制限する第1制限部と、第1制限部の出力から、指令トルクに追従するための3相の電圧指令をIPMSMに印加するインバータ部と、を含む。
(もっと読む)
インバータ制御装置及びインバータ制御方法
【課題】安定な制御系である、インバータ制御装置及び制御方法を提供する。
【解決手段】 直流電源から入力される直流電力を交流電力に変換し、モータに供給するインバータ6と、インバータ6から出力される交流電圧の指令値を、交流電流の検出値に基づき算出する指令値算出手段と、指令値の位相又は検出値の位相を補償する位相補償手段と、位相補償手段により補償された指令値又は検出値に基づき、インバータ6を制御するインバータ制御手段と、モータ8の回転速度を検出するモータ回転速度検出手段とを備え、位相補償手段は、所定の位相余裕を得るために設定された位相補償時間及び回転速度に基づき位相進み量を算出し、位相進み量に応じて、モータ8の固有の特性に基づく位相を補償する。
(もっと読む)
モータ制御装置
【課題】モータの回転駆動制御の信頼性を高めつつ、コストが高くなること及びCPUの処理負荷が増大することを抑制することができるモータ制御装置を提供すること。
【解決手段】モータを回転駆動制御するために必要なm個のエンコーダ信号と、p個の予備のエンコーダ信号との全てのエンコーダ信号(n個、nはm+p)の異常診断を行い(S10)、正常なエンコーダ信号の位相情報をCPU60へ出力する(S11)。そして、S10にて正常と診断されたエンコーダ信号のうち、m個の正常なエンコーダ信号をCPU60へ直接出力する。
(もっと読む)
モータの磁極位置推定方法
【課題】磁極位置推定結果が真値に対して電気角90度以上ずれていた場合においても、不安全動作を引き起こすことのない磁極位置推定方法を提供する。
【解決手段】仮の磁極位置を基準に電気角半周期をN分割した位相に電流を印加し、そのときの移動方向D(+,0,−)を判定するステップ1と、移動方向の符号が反転する電気角領域を2分割した位相に電流を印加し、そのときの移動方向D1を判定するステップ2と、移動方向が+から0および0から−に変化する電気角領域をそれぞれ2分割した位相に電流を印加し、そのときの移動方向D2を判定するステップ3と、移動方向が0となる電気角領域の中間点を発生電磁力が零となる位相と決定するステップ4と、発生電磁力が零となる位相から90°ずらした位相を発生電磁力が最大となる位相と決定するとともに電流を印加し、その時の移動方向D3を判定するステップ5とを備える。
(もっと読む)
モータ駆動装置
【課題】ロータマグネットの磁極数に制限無く、広範囲のブラシレスモータの駆動に使用可能なモータ駆動装置を提供する。
【解決手段】モータ駆動装置は、コイルユニットと回転軸に固定された磁極数nのマグネットを有するロータマグネットとを有するモータ本体10と、磁極検出素子11,12,13とを備えた3相n極構造のDCブラシレスモータ1を駆動する。DCブラシレスモータ1を駆動では、例えば、1つの磁極検出素子11からの出力信号の磁極数nの半分のホール信号周期からロータマグネットの1回転周期Tを演算し、正弦波駆動信号の1周期SをS=T/(n/2)により求め、正弦波駆動信号の1周期Sを1つの磁極検出素子11の出力信号の1周期毎に更新する。
(もっと読む)
1 - 20 / 219
[ Back to top ]