
Fターム[5H560DB20]の内容
無整流子電動機の制御 (40,007) | 速度検出 (1,604) | 位置検出器と兼用するもの (847)
Fターム[5H560DB20]に分類される特許
61 - 80 / 847
永久磁石回転電機及びその運転方法
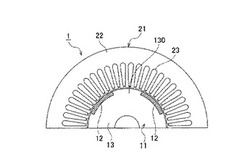
【課題】高速時の誘導起電力の低減と低速時の高トルク特性が可能な永久磁石回転電機。
【解決手段】本発明は、電機子巻線23を8極にして所定の短時間だけ大電流の磁化電流を流すことによって発生する磁界により可変磁力磁石それぞれを同一方向に着磁させ、磁石トルク主体の8極PMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作する4極IPMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を消磁してリラクタンストルクのみで動作する4極RMモードとし、起動時及び速度領域の移行時にこれら8極PMモード、4極IPMモード及び4極RMモードの間で相互にモードを切り替えて可変速運転する永久磁石回転電機。
(もっと読む)
回転機の制御装置

【課題】デッドタイム付与後の実際のスイッチング状態の切替タイミングが複数のレッグ間で重なることで、サージ電圧が大きくなるおそれがあること。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータINVの出力電圧ベクトルのノルムを設定する。位相設定部26では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部34では、ノルム設定部30によって設定されたノルムVnと、位相設定部26によって設定された位相δとに基づき操作信号を生成してインバータINVに出力する。操作状態設定部34には、デッドタイム付与後における実際のスイッチング状態の切り替えが複数レッグで同時になされない波形が記憶されている。
(もっと読む)
多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置
【課題】 回転角センサの取り付け位置ずれ等による角度誤差を、多相回転機を搭載対象に搭載したままの状態で検出する多相回転機の制御装置を提供する。
【解決手段】 3相モータ(多相回転機)の制御装置であるマイコンは、モータに取り付けられた回転角センサの取り付け位置ずれ等による角度誤差Δθを算出する処理を実行する。まず、d軸およびq軸電流指令値を0アンペアに設定する(S00)。次に、モータの回転軸を外部から回転させ(S10)、逆起電圧によって流れる相電流を検出し(S30)、3相2相変換する(S40)。制御器は、電流検出値が0アンペアになるように電圧指令値Vq、Vdを出力する(S50)。角度誤差算出手段は、電圧指令値Vq、Vdに基づいて角度誤差Δθを算出し(S70)、角度補正値として記憶する(S90)。以後、回転角センサの検出値から補正値を差し引いて補正する。
(もっと読む)
DCブラシレスモータ
【課題】商用交流電源などのAC電源の直接入力が可能で、その商用電源の周波数に応じた速度で駆動が可能なAC入力のDCブラシレスモータを提供する。
【解決手段】本発明のAC入力のDCブラシレスモータは、駆動巻線と可動子とを少なくとも有するモータ部と、駆動巻線に駆動電力を供給するパワー素子と、駆動電力を制御するパワー制御部と、速度制御信号を発生する速度制御部と、商用交流電源が入力される端子部、および入力される商用交流電源の周波数を安定させる安定化部とを備え、パワー制御部は速度制御信号によりパワー素子の通電量を制御し、速度制御部は端子部に入力される商用交流電源の周波数に基づいて速度制御信号をパワー制御部に出力し、モータ部とパワー素子とパワー制御部と速度制御部とを少なくとも内蔵して、端子部への商用交流電源の接続によって商用電源周波数に応じた速度で駆動される。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
永久磁石同期電動機の永久磁石の不可逆減磁が発生したか否かを検出する制御装置
【課題】永久磁石同期電動機の駆動軸の動作範囲が制限された場合でも永久磁石同期電動機の磁石の不可逆減磁が発生したか否かを適切に検出することができる制御装置を提供する。
【解決手段】正弦波状指令信号生成部17は、永久磁石同期電動機3へのトルク指令に対する正弦波状指令信号を生成する。推定トルク定数計算部23は、正弦波状指令信号の複数周期に亘る同一の動作状態での複数の電流値と複数の加速度値から取得した電流代表値及び加速度代表値と、永久磁石同期電動機3に関連する予め設定されたイナーシャとから、永久磁石同期電動機3に関連する推定トルク定数を計算する。減磁検出部24は、推定トルク定数と永久磁石同期電動機3に関連する予め設定されたトルク定数との差分に基づいて、永久磁石同期電動機3の永久磁石34a,34b,34c,34dに不可逆減磁が発生したか否かを検出する。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
駆動装置および電動車両
【課題】パルス幅変調制御によるインバータの制御から矩形波制御によるインバータの制御への切替時にインバータの制御性が低下するのを抑制する。
【解決手段】インバータをPWM制御によって制御するか矩形波制御によって制御するかに拘わらず、電圧位相指令θs*の今回値と前回値との差分としての電圧位相指令変化量Δθsが変化許容値θslim以下となるよう電圧位相指令θ*を設定し(S330〜S430)、設定した電圧位相指令θs*を用いて次の切替電気角θswやスイッチングパターンを設定する(S440,S450)。
(もっと読む)
インバータ装置
【課題】 指令速度や負荷にかかわらず、モータのロックを的確に検出できる信頼性にすぐれたインバータ装置を提供する。
【解決手段】 モータの起動の開始から予め定めた一定時間内で、かつ推定回転速度が予め定めた一定値に達しないうちに、モータ電流が予め定めた設定値以上に上昇したとき、モータがロックしていると判定する。
(もっと読む)
ブラシレスモータおよびこれを備える車両
【課題】ロータの回転が不安定になることが抑制される構成を備え、そのうえでコストの低減に貢献することのできるブラシレスモータおよびこれを備える車両を提供する。
【解決手段】モータは、第1U相コイル32Aおよび第2U相コイル32Bと、第1V相コイル32Cおよび第2V相コイル32Dを有する2相の第1コイル32と、第1U相コイル42Aおよび第2U相コイル42Bと、第1V相コイル42Cおよび第2V相コイル42Dとを有する2相の第2コイル42とを有している。そして、各U相コイル32A,32Bおよび各V相コイル32C,32Dの周方向Wの位置と、各U相コイル42A,42Bおよび各V相コイル42C,42Dの周方向Wの位置とが互いに異なる。
(もっと読む)
モータ駆動装置
【課題】 モータ角度検出器に故障が生じても、モータロータの磁極位置に応じた制御が行えて、モータ駆動が行えるモータ駆動装置を提供する。
【解決手段】 車輪駆動用のモータ6につき、モータ角度検出器36の角度検出値に従い、磁極位置に応じた制御をする基本駆動制御部38を備えたモータ駆動装置20に適用する。車輪回転数検出器24の検出値からモータロータの角度を推測する車輪速度対応モータ角度推測手段46と、センサレス角度検出手段50を設ける。モータ角度検出器36が故障と判別した場合に、基本駆動制御部38による制御を、車輪速度対応モータ角度推測手段46の出力を用いて行わせるセンサ切替え手段49を設ける。車輪回転数検出器24が故障の場合、センサレス角度検出手段50を用いる。
(もっと読む)
インバータ制御装置及びインバータ制御方法
【課題】安定な制御系である、インバータ制御装置及び制御方法を提供する。
【解決手段】 直流電源から入力される直流電力を交流電力に変換し、モータに供給するインバータ6と、インバータ6から出力される交流電圧の指令値を、交流電流の検出値に基づき算出する指令値算出手段と、指令値の位相又は検出値の位相を補償する位相補償手段と、位相補償手段により補償された指令値又は検出値に基づき、インバータ6を制御するインバータ制御手段と、モータ8の回転速度を検出するモータ回転速度検出手段とを備え、位相補償手段は、所定の位相余裕を得るために設定された位相補償時間及び回転速度に基づき位相進み量を算出し、位相進み量に応じて、モータ8の固有の特性に基づく位相を補償する。
(もっと読む)
モータ駆動装置
【課題】 モータ角度検出器に故障が生じても、モータロータの磁極位置に応じた制御が行えて、モータ駆動が行えるモータ駆動装置を提供する。
【解決手段】 車輪駆動用のモータ6につき、モータ角度検出器36の角度検出値に従い、磁極位置に応じた制御をする基本駆動制御部38を備えたモータ駆動装置20に適用する。車輪回転数検出器24の検出信号からモータロータの角度を推測する車輪速度対応モータ角度推測手段46と、モータ角度検出器36の故障を判別するセンサ故障判別手段48とを設ける。故障と判別した場合に、基本駆動制御部38による制御を、モータ角度検出器36による角度検出値に代えて、車輪速度対応モータ角度推測手段46の出力するモータロータ角度を用いて行わせるセンサ切替え手段49を設ける。
(もっと読む)
モータ駆動装置、それを用いたファン制御装置およびヒートポンプ装置
【課題】モータが運転停止後も慣性によって回転している状態から再起動する場合に、インバータへの過電圧や過電流などの異常を発生させずにモータを起動させることができるモータ駆動装置を提供する。
【解決手段】モータ駆動装置20では、マイクロコンピュータ30は、室内ファン15を駆動するファンモータ51を停止させる際、ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止する。ファンモータ51はブラシレスDCモータであって、起動後はロータ位置センサレス制御によって駆動される。ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止することによって、モータを再起動させるときの回転数は所定回転数以下となっている。
(もっと読む)
駆動装置、及び駆動方法
【課題】モータの負荷が大きい場合において誘起電圧に基づいてモータを駆動させる。
【解決手段】駆動装置は、モータのコイルに通電するインバータ回路と、各コイルに生じる誘起電圧と等価中性点電位との比較結果を示すパルス信号を生成する誘起電圧インターフェース回路と、コイルに流す電流の向きを示す複数の通電パターンを用いて通電を行い、所定の電流値に達するまでの通電時間に基づいてロータが停止している位置を検出する停止磁極位置検出部と、停止磁極位置検出が検出したロータの位置に基づいて選択した通電パターンで通電を行いロータにトルクを加えた後に、誘起電圧インターフェース回路が出力するパルス信号のレベルに基づいてロータにトルクを加える通電パターンを選択し、選択した通電パターンで通電をインバータ回路に行わせる起動通電を行った後に誘起電圧に基づいた制御を行う通電制御部とを備える。
(もっと読む)
電動機制御装置、及びその電動機制御装置を用いた電動過給装置
【課題】電動機の損傷が発生することなく、適切に位置センサの位相を補正でき、位置センサの取り付け誤差低減にコストをかける必要のない電動機制御装置、及びその電動機制御装置を用いた電動過給装置を得る。
【解決手段】電動機5の磁極位置を検出する位置センサ信号の位相を補正する位相補正量を生成して出力する位相補正手段83を備え、位相補正手段83は、電動機5の回転速度が所定の範囲内にある場合に、通電停止信号を生成して出力し、位置センサの信号または第1の位相と電動機5の誘起電圧との比較に基づいて位相補正量を生成して記憶し、出力する。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
ブラシレスDCモータおよび換気送風機
【課題】発生トルクを高精度に制御可能なブラシレスDCモータおよび換気送風機を得ること。
【解決手段】モータ部3の回転速度を求め回転速度フィードバック値ωrfを出力する速度検出部5と、直流電圧を検出し直流母線電圧フィードバック値Vdcfを出力する直流母線電圧検出部6と、直流母線の平均電流を求め直流母線平均電流フィードバック値Idcfを出力する直流母線平均電流検出部7と、電機子電流指令値Ia*と各フィードバック値を入力し駆動回路2に電圧指示値Vsを出力する電機子電流制御部8と、を備え、電機子電流制御部8は、電機子電流フィードバック値Iafを推定する電機子電流推定部8fと、電機子電流指令値Ia*と電機子電流フィードバック値Iafとの偏差ΔIaを算出する偏差算出部8dと、偏差ΔIaをなくす電圧指示値Vsを出力する制御アンプ8aと、を備える。
(もっと読む)
インバータ制御装置および車両
【課題】矩形波制御から過変調制御に切り替えた後のモータのトルク変動を抑制する。
【解決手段】過変調制御によってインバータを制御するときに、d軸,q軸の電流Id,Iqと電流指令Id*,Iq*との差分と比例項,積分項の制御ゲインと積分項の積分区間とを用いた電流フィードバック制御によってd軸,q軸の電圧指令Vd*,Vq*を設定してインバータを制御するものにおいて、矩形波過変調切替時に、矩形波過変調切替によるモータのトルク変動が大きくなりやすい変動想定状態のときには(S110,S120)、変動想定状態でないときに比して比例項,積分項のゲインを大きくすると共に積分項の積分区間を短くする(S140)。
(もっと読む)
61 - 80 / 847
[ Back to top ]