
Fターム[5H560DB20]の内容
無整流子電動機の制御 (40,007) | 速度検出 (1,604) | 位置検出器と兼用するもの (847)
Fターム[5H560DB20]に分類される特許
141 - 160 / 847
電動機の制御装置
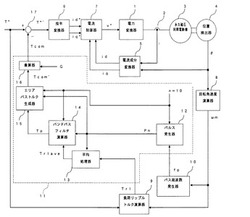
【課題】電動機の出力トルクに発生するトルクリップルを打ち消すトルク補償信号を補正信号発生テーブルを用いて作成しているため、運転を行う前に補正信号発生テーブルを作成するための事前の試験を必要としていたものを、事前の試験を行わずにトルク補償信号を作成することを実現する。
【解決手段】トルク補償信号を打ち消したい周波数成分の1周期を定数n個分のエリアに分けて各エリアに応じたトルク補償信号をバンドパスフィルタの出力とし、各エリアに応じたトルク補償信号を電動機を運転しながら随時更新させることで補正信号発生テーブルを作成するための事前の試験が必要なくなる。
(もっと読む)
インバータ制御装置、それを用いた電動圧縮機および家庭用電気機器

【課題】インバータ制御装置において、120度以上に通電角を広げる広角制御や、ブラシレスDCモータのステータに誘起される誘起電圧の位相に対して電圧位相を進める進角制御を行なうとき、無通電角が電気角30度は生じ、インバータが望みの電圧を十分に出力することができず、インバータの直流電圧利用率が若干落ちることにより、ブラシレスDCモータの端子電圧も若干小さくなり、運転範囲に対して望む値に対して若干狭くなるという課題を有していた。
【解決手段】ブラシレスDCモータの機械角1周期中に少なくとも1回は位置検出手段208により検出した誘起電圧のゼロクロス点を使用せずに、過去に取得した検出値から演算した演算値から通電角を誘起電圧のゼロクロス点よりも前に転流する制御を行うことで、無通電角を電気角30度未満で抑えられ、より広い運転範囲の制御を可能とする。
(もっと読む)
モータ駆動制御装置
【課題】モータを起動させる際、風等の影響を受けてモータが正方向または逆方向のどちらかに回転している状態にあっても、モータを確実に起動させることができるモータ駆動制御装置の提供。
【解決手段】回転方向検知部2は、モータ51起動直前の回転方向を検知する。駆動電圧調整部5は、回転方向検知部2により検知されたモータ51起動直前における回転方向に応じて、モータ51起動時の駆動電圧SU1,SV1,SW1が、モータ51が無回転の状態で起動する場合にモータ51に出力される所定駆動電圧と異なるように調整する。特に、駆動電圧調整部5は、モータの起動直前の回転方向に応じて、モータ51の回転数を制御するための制御パラメータを、モータ51が無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された制御パラメータに基づいてモータ起動時の駆動電圧を更に調整することで、モータ起動時の駆動電圧が所定駆動電圧と異なるように調整する。
(もっと読む)
可変磁束ドライブシステム
【課題】可変磁石であることによるトルク精度の劣化の抑制や磁化処理に伴う過渡トルクの抑制を図り、システム全体の効率を向上し広い速度範囲に対応できる可変磁束ドライブシステムを提供することである。
【解決手段】磁化要求生成部29は、インバータの変調率に応じて可変磁石を磁化させる要求を可変磁束制御部13に対して発生し、可変磁束制御部13は、その磁化要求を入力すると、インバータ1からの磁化電流によって磁束を可変させて可変磁石を磁化させる。切替器37は、トルク指令生成部38からのトルク指令に基づくDQ軸電流基準と可変磁束制御部13からのDQ軸磁化電流指令とを切り替え、ゲート指令生成部15は、切替器37からのトルク指令に基づくDQ軸電流基準またはDQ軸磁化電流指令に基づいてインバータ1を制御するためのゲート指令を生成する。
(もっと読む)
回転機の制御装置
【課題】永久磁石を備えるモータジェネレータ10の減磁の有無を判断するための処理手段を適合するに際し、その工数が多くなること。
【解決手段】モータジェネレータ10は、クラッチC1を介して駆動輪14に機械的に連結されて且つクラッチC2を介してエンジン16に機械的に連結されている。車両の起動スイッチがオンされた直後、クラッチC1,C2を解除した状態において、電流フィードバック制御によってモータジェネレータ10のトルクを制御し、この際の実際のトルクが要求トルクを下回ることに基づき、永久磁石の磁束が減少したと判断する。
(もっと読む)
モータ駆動制御システムの制御装置およびそれを搭載する車両
【課題】モータ駆動制御システムにおいて、矩形波制御からPWM制御への切換えの際に、制御モードの切換え遅れに起因して発生する電流乱れを抑制する。
【解決手段】モータ駆動制御システム100を制御するECU300は、矩形波制御モードおよびPWM制御モードのいずれかによってインバータ140を制御して交流電動機200を駆動する。ECU300は、制御モード選択部330と、交流電動機200のモータ電流をA/D変換するA/D変換部340とを備える。A/D変換部340は、矩形波制御モードの場合に、交流電動機200の回転速度が急激に低下したときは、交流電動機200の電気角に基づく実行周期よりも速い実行周期に従って動作する。制御モード選択部330は、矩形波制御モードの場合に、モータ電流の電流乱れが発生したことに応じて、矩形波制御モードからPWM制御モードへ切換える。
(もっと読む)
モータ制御方法
【課題】周期性負荷による周期的な回転速度変動等を抑制するに際し、変動抑制トルク制御を行うことができるモータの出力トルクの可制御域を拡げる。
【解決手段】変動抑制トルク制御では、周期性負荷となる圧縮機6によるモータ5の角速度ω等の変動を抑制すべく、基本波成分抽出部14にて角加速度αの基本波成分を抽出し、調整指令Ic*に基づいて振幅調整部15が動作する。減算部16は、平均電流指令Ia*から振幅調整部15の出力を減算して振幅指令Im*を出力する。電流位相指令作成部19は電圧指令V*の最大値がインバータ4の出力電圧の上限値に達したことに応答して、電流位相指令β*を進ませる。
(もっと読む)
モータ駆動制御装置及び画像形成装置
【課題】 小容量のEEPROMを用いて、より低コストな構成で、通電切換えタイミングのずれを抑制し、電気角1周期成分の回転むらを低減させるモータ駆動制御装置及び画像形成装置を提供する。
【解決手段】 ブラシレスモータと、ブラシレスモータのロータ位置を検出する位置検出手段と、ブラシレスモータのステータ巻線への通電を切換えるインバータ手段と、位置検出手段から出力されるロータ位置の信号に基づいて、ブラシレスモータを駆動するための駆動信号を出力すると共にインバータ手段を駆動する制御手段と、予め測定した位置検出手段の特性ばらつきに基づいて決定された進角情報を記憶する記憶手段とを備え、制御手段が、記憶手段に記憶された進角情報に基づいて前記ブラシレスモータを進角制御する。
(もっと読む)
電気機械の制御方法
【課題】電気機械の効率を向上させること。
【解決手段】電気機械を制御する方法が提供され、本方法は、電気機械の相巻線を供給電圧によって励起する段階と、相巻線の電流が閾値を上回ったときに相巻線をフリーホイールする段階と、を含む。次いで、閾値は、供給電圧及び/又は電気機械の速度のうちの少なくとも1つの変化に応答して調整される。加えて、本方法を実施する制御システム、並びに制御システムを備えた電気機械を提供する。
(もっと読む)
モータ駆動装置
【課題】電流量と検出角度誤差の相関データを予め取得したり、検出角度を補正したりすることなく、精度良く電気角を算出すること。
【解決手段】モータ駆動装置は、3相ブラシレスモータ4と、VR型レゾルバ5と、電気角算出器6と、を備える。3相ブラシレスモータ4は、回転駆動により漏れ磁束を発生する。VR型レゾルバ5は、3相ブラシレスモータ4の漏れ磁束によるノイズが、2つの検出信号V1,V2に対して同一に混入するような設定とされ、3相ブラシレスモータ4の回転軸位置である電気角θを検出する。電気角算出器6は、VR型レゾルバ5からの2つの検出信号V1,V2に基づいて、電気角θを算出する。
(もっと読む)
モータ制御装置
【課題】モータの脈動振動を効率よく抑制することができるモータ制御装置を提供することである。
【解決手段】上記した目的を達成するため、本発明のモータ制御装置1は、モータ2を回転制御する回転制御手段3と、回転中におけるモータ2の振動を検出する振動検出手段としての加速度センサ4と、加速度センサ4によって検出された振動から特定周波数の振動成分を抽出する特定周波数成分抽出手段5と、特定周波数の振動を当該特定周波数の主振動成分と主振動成分に重畳されている脈動振動成分とに分解する振動成分分解手段6と、上記主振動成分と脈動振動成分の全てを同時に抑制する補償信号を生成して繰返して回転制御手段3へ入力する繰返し制御手段7とを備えた。
(もっと読む)
電力変換装置
【課題】過変調制御が行われる場合において、信号伝達経路等の異常診断頻度の低下を回避するためのスイッチング素子の操作信号を適切に生成することのできる電力変換装置を提供する。
【解決手段】第2セレクタSL2から出力されるスイッチング素子Sjkの操作信号gjkの立ち下がりを入力とし、駆動回路DUから出力される駆動信号djkの変化に基づき、第2セレクタSL2からスイッチング素子Sjkまでの信号伝達経路に異常が生じていないか否かを診断する構成において、過変調制御又は矩形波制御によってモータジェネレータの制御が行われる場合、第2セレクタSLから操作信号gjkとしてオン操作信号が出力される期間に、出力されるオン操作信号をオフ操作信号に強制的に変更する。
(もっと読む)
駆動装置の制御装置
【課題】可変磁束型回転電機を備えた駆動装置を制御する制御装置の規模を増大させることなく、誘起電圧をインバータの耐圧の限度内に収めることができる技術を提供する。
【解決手段】永久磁石を備えたロータとコイルを備えたステータとを有する回転電機と、ロータから供給される界磁束を変化させる界磁調整機構と、コイルに接続されたインバータとを備えた駆動装置を制御する駆動装置の制御装置は、コイルに誘起される誘起電圧がインバータの耐圧Vmaxを越えない範囲内でロータの回転速度に応じて設定された界磁制限値Blmtを上限として、少なくとも回転速度に基づいて界磁調整機構により調整される界磁束の目標となる界磁指令値を決定する。
(もっと読む)
モータ制御装置
【課題】ゼロ速度から高速度回転までのモータ運転中において、モータの層間短落および位置センサ部の誤差増大等の中間レベルのモータ異常を検知できるモータ制御装置を得ること。
【解決手段】モータ制御装置100は、モータ310に出力される出力電流の電流値を検知して目標トルクに応じた電流値に制御するモータ制御装置100であって、モータ310の運転中にモータ310に出力される出力電流の電流値と出力電圧の電圧値に基づいてモータ運転状態値を演算し、その演算されたモータ運転状態値に基づいてモータ310に異常が発生しているか否かを判定するモータ異常判定部140を有する。
(もっと読む)
モータの駆動制御装置およびモータの駆動制御方法
【課題】簡易に複数の制御項目を設定可能なモータの駆動制御装置およびモータの駆動制御方法を提供する。
【解決手段】モータの駆動制御装置2は、パルス情報検出回路5と、パルス情報変換回路6と、制御実行処理回路7と、インバータ回路4とを備える。駆動制御装置2に1系統のPWM制御信号を入力し、その周波数に応じて制御項目を選択し、デューティ比に応じて選択された制御項目を制御する。そのため、モータの駆動制御装置2は、簡易な回路構成でありながら、複数の制御項目を設定できる。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】位置センサを必要とせず、ブラシレスDCモータのモータ定数や速度による調整を必要としない様々な機種に容易に展開が可能なブラシレスDCモータの駆動装置を提供する。
【解決手段】3相のブラシレスDCモータ4の2相を2相ブリッジで構成したインバータ3の出力と接続し、倍電圧整流で構成した平滑整流回路2の直列に接続されている平滑コンデンサ2eと2fの接続線と残りの1相を接続する。ブラシレスDCモータ4を位置検出部5によって誘起電圧を基にした位置検出で矩形波駆動し、位置を検出できない相は検出可能な2相の位置検出タイミングを基に位置推定部6で位相推定し転流を行う。
(もっと読む)
モータ制御装置、これを用いた圧縮機駆動装置及びこれを用いた冷凍機器
【課題】位置フィードバック運転モード中に必要トルクが急激かつ大きく変化した場合に発生する速度変動を抑制し、必要トルクの変化に対して一様な安定性を持つ制御構成を提供することを目的とする。
【解決手段】モータのトルクに係る電気量を演算する演算手段と、電流指令値を入力とする電流制御器と、前記電流制御器の出力を入力とする電圧指令値作成器と、前記電圧指令値作成器の出力に従って永久磁石モータに電圧を印加する電力変換回路とを備えたモータ制御装置において、位置フィードバック運転モード中にモータのトルクが変化あるいは安定するタイミングをトリガとし、そのトリガに合わせて、変化後のトルクに比例する値を基に、前記演算手段と前記電流制御器のうち少なくとも1つに係る電気量を設定する。
(もっと読む)
ロボットシステム
【課題】高トルク運転時にモータに対して十分な電力を供給可能にするとともに、減速動作時にモータから生じる回生エネルギーを有効利用可能にする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。制御部27は、自動モードに設定されるとモータMの動作状態に応じて昇降圧回路29の動作状態を自動的に切り替え、高トルクモードに設定されると昇圧動作を実行するように昇降圧回路29の動作を制御し、省エネモードに設定されると降圧動作を実行するように昇降圧回路29の動作を制御する。制御部27は、回生エネルギーをインダクタL1に蓄積可能な状態となるように昇降圧回路29の動作を制御する機能と、モータMに対するダイナミックブレーキをかけるように昇降圧回路29の動作を制御する機能とを有する。
(もっと読む)
永久磁石型同期電動機の駆動装置
【課題】磁極位置検出器を有する永久磁石型同期電動機を駆動する際に、磁極位置検出器の取り付け位置の原点と磁極位置原点との間のずれ角のチューニング忘れによる脱調を防止する。
【解決手段】磁極位置検出器を有する永久磁石型同期電動機を電力変換装置により駆動するための駆動装置において、前記電動機の固定子を基準とした前記磁極位置検出器の原点の位相角と、前記固定子を基準とした磁極位置推定値の位相角との差を算出し、その値をずれ角として予めRAM等の記憶装置に格納しておき、運転指令が発生したときに、前記記憶装置内のずれ角を用いて真の磁極位置を求める。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、ロボットの一連の動作時間を短縮しつつ、減速動作時にモータから生じる回生エネルギーを消費する際に発生する熱を低減する。
【解決手段】昇降圧回路29は、入力電圧を昇圧値まで昇圧して出力する昇圧動作と、入力電圧を降圧して出力する降圧動作のうち、いずれかの動作を実行する。制御部27は、加速動作の後に等速動作を経ることなく減速動作が実行される動作パターンに基づいてモータMが駆動される際、加速動作の開始時点から加速動作終盤の切替タイミングまでの昇圧期間に昇圧動作を実行するとともに、切替タイミングから次の加速動作の開始時点までの降圧期間に降圧動作を実行するように昇降圧回路29の動作を制御する。制御部27は、演算により切替タイミングを求めることで昇圧期間の長さを決定する。
(もっと読む)
141 - 160 / 847
[ Back to top ]