
Fターム[5H560JJ02]の内容
無整流子電動機の制御 (40,007) | 保護、補償、監視、表示 (1,472) | 保護 (1,068) | 過電流 (246)
Fターム[5H560JJ02]に分類される特許
1 - 20 / 246
モータの制御装置
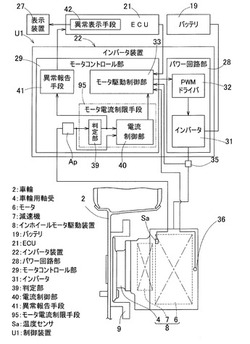
【課題】 車両の運転を急激に妨げることなく、モータを温度管理し、適切な対処が迅速に行えるモータの制御装置を提供する。
【解決手段】 モータ6のモータコイルに、このモータコイルの温度Tcを検出する温度センサSaを設ける。温度センサSaで検出される温度Tcに対し複数の閾値が設定され、各閾値で区分される温度領域毎に、互いに異なる電流制限条件が設定され、検出される温度Tcの含まれる前記温度領域の前記電流制限条件に応じてモータ6の電流値を制限するモータ電流制限手段95を設けた。
(もっと読む)
モータ制御装置及びモータ制御方法

【課題】過渡的に大きな制動電流がコイルに流れてしまうことを防ぎつつ、安全かつ速やかにモータを停止させるためのブレーキ機能を簡素かつ確実に確保すること。
【解決手段】モータ制御装置は、オン状態にされたときにモータ107の3相のコイルを短絡させ、オフ状態にされたときに3相のコイルの短絡を解消する3個のパワー素子106d〜106fと、3相のコイルのうちU相及びW相のコイルに流れる電流を検出する電流センサ120a、120bと、パワー素子106d〜106fをオン状態に制御し、電流センサ120a、120bによって検出されたU相電流及びW相電流並びに電流センサ120a、120bの検出結果に基づいて算出されたV相電流のいずれかが所定の閾値を超えた場合に、パワー素子106d〜106fを所定時間オフ状態に制御し、所定時間の経過後パワー素子106d〜106fをオン状態に制御する制御部118と、を含む。
(もっと読む)
モータ駆動装置
【課題】本発明は、目標速度を維持しながら、駆動電流の過電流を防止できるモータ駆動装置に関する。
【解決手段】本発明は、ホール(Hall)センサーの検出信号によって、PWM信号のデューティを調整し、上記デューティの全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値を追従するようにするデューティ調整部と、外部からのPWM制御信号が入力され、上記デューティ調整部のデューティ調整によって、デューティが調整されるPWM信号を生成する信号生成部と、上記ホール(Hall)センサーの検出信号及び上記信号生成部のPWM信号によってモータ駆動を制御する駆動制御部と、を含むモータ駆動装置を提供する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】非常に負荷が軽く不安定なシステム状態もしくは非常に負荷が重い状態であっても、安定駆動できるとしたモータ駆動装置を提供すること。
【解決手段】端子電圧取得部5が取得した端子電圧の発生タイミングによって通電角を120度以上180度未満の間で決定する通電角決定部10と、周波数設定部9で設定した周波数と通電角決定部10で決定した通電角で第2の波形信号を出力する第2波形発生部12と、端子電圧取得部5が取得した端子電圧が所定の状態に近づくよう第2の波形信号を補正した補正波形信号を出力するので、広い負荷範囲で電流位相が安定し、安定したモータ駆動装置の提供が可能となる。
(もっと読む)
ブラシレスファンモータの駆動装置及びブラシレスファンモータの制御方法
【課題】ブラシレスファンモータのロータ停止位置を精度良く検出できるようにする。
【解決手段】ラジエータに対して配設されたラジエータファンの回転機構に使用されるブラシレスファンモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相のコイルに流す電流の通電パターンを指令する信号を発生させる。電流比較手段が、コイルに流れる電流の電流値が予め設定された閾値以上になったら検出信号を出力する。カウンタが、通電パターンを指令する信号が出力されてから検出信号が出力されるまでの時間を通電パターンごとに計数する。位置推定手段が、通電パターンごとに計数されたカウント値の大小からロータ停止位置を決定する。
(もっと読む)
ブラシレスファンモータの駆動装置、及び始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
モータ電流検出装置、モータ制御装置、及び電動工具
【課題】バッテリからブラシレスモータに流れる平均電流及び瞬間電流をそれぞれ簡素な構成で適切に検出できるようにする
【解決手段】バッテリからブラシレスモータに流れる電流を検出する1つの電流検出抵抗R0と、この電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1以下の周波数帯域の電流成分(平均電流)を抽出する第1フィルタ手段42と、電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1よりも高い第2カットオフ周波数fc2以下の周波数帯域の電流成分(瞬間電流)を抽出する第2フィルタ手段43と、を備えている。このような簡素な構成ながら、高効率・高出力のブラシレスモータにおいて回路保護のために検出すべき平均電流及び瞬間電流を適切に検出することができる。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、ブラシレスファンモータの駆動装置及び制御方法
【課題】精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相の前記コイルに流す電流のあらかじめ定められた複数の通電パターンを指令する信号を発生させる。カウンタが、複数の前記通電パターンを指令する信号が出力されることでカウントアップを開始する。複数の通電パターンのうち、第1の通電パターンによる通電を指令し、コイルに流す電流をオフした後、該コイルに流れる回生電流がゼロになるまでに要する時間が経過したら、続く第2の通電パターンによる通電を指令する信号を出力する。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、並びにブラシレスファンモータの駆動装置及び制御方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスモータの駆動装置、ブラシレスモータの始動方法、ブラシレスファンモータの駆動装置、及びブラシレスファンモータの始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスモータの駆動制御装置
【課題】ブラシレスモータの駆動制御装置から外部の上位制御装置に送信される回転速度情報の認識精度を維持する。
【解決手段】ブラシレスモータを外部の上位制御装置からの制御指令に基づいて駆動制御するブラシレスモータの駆動制御装置において、ブラシレスモータの回転速度情報、又はブラシレスモータ及びブラシレスモータの駆動制御装置に発生した異常の内容を表す異常情報を、PWM信号により外部の上位制御装置に送信するときに(S408)、PWM信号の周波数を、回転速度情報又は異常情報に応じて設定し(S406,S407)、PWM信号のデューティ比を、異常が発生したときと発生していないときとで異なる値D1,D3に設定する(S403,S405)。また、異常が発生した場合、ブラシレスモータが回転可能であるときには、デューティ比をさらに異なる値D2に設定して(S404)、周波数を回転速度情報に応じて設定する(S406)。
(もっと読む)
モータ制御装置
【課題】電動車両がスリップを起こした場合にモータ50の過電流を抑制すると共に、トルクの減少を抑制する。
【解決手段】電動車両を駆動するモータ50の回転数Nとトルク指令値Trqcomに応じてモータ50に印加する電圧波形を矩形波形又は非矩形波形に設定するマップを含み、マップに基づいてモータ50を制御する電動車両のモータ制御装置であって、電動車両がスリップしたと判定した際に、マップの矩形波形を印加する領域の中に矩形波形を印加することを禁止する矩形禁止領域Aを設定し、モータ50の回転数Nとトルク指令値Trqcomとが矩形禁止領域Aに入った場合に、モータ50に印加する電圧波形を矩形波形から非矩形波形に切り替えるとともに、モータ50の制御方式を最大トルク制御から弱め界磁制御に切り替える。
(もっと読む)
3相回転機の制御装置
【課題】 2組の巻線組を有する3相回転機の駆動を制御する制御装置において、相電流検出値のみを用いて、インバータまたは巻線組の故障を検出する。
【解決手段】 第1系統インバータ601および第2系統インバータ602は、それぞれ3相モータ80を構成する2組の巻線組801、802に、振幅が互いに同一で、位相が互いに30°ずれる交流電流を供給する。電流検出器701、702は、インバータ601、602から巻線組801、802に通電される相電流を検出する。故障判定手段751、752は、互いに他系統の3相電流検出値に基づいて、自系統の相電流推定値を算出し、電流検出値と比較する。これにより、ECU101は、電流検出器701、702からの情報である相電流検出値のみを用いて、インバータ601、602または巻線組801、802の故障を検出することができる。
(もっと読む)
電動パワーステアリング装置
【課題】インバータ装置を構成しているスイッチング素子に過電流が流れた場合でも、昇圧回路を構成するスイッチング素子を保護することができる電動パワーステアリング装置を提供すること。
【解決手段】インバータ装置に流れる少なくとも1相以上の電流値が所定値1(I0)以上になった場合(ステップ、S101:YES)が、所定時間T1以上経過(ステップ、S102:YES)し、かつ、出力電圧検出手段から検出した出力電圧が所定値2(V1)以下になった場合(ステップ、S103:YES)には、第1および第2のスイッチング素子のオン/オフ比を50%に制限する(ステップ、S104)。昇圧回路の第1、および第2のスイッチング素子のオン/オフ比を50%に制限するので、昇圧回路内に流れる電流の急激な増加を抑えることができる。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、実変調度となまし変調度との間に乖離が生じても、PWM制御モードと過変調制御モードとの間の制御モード切替に際し、過大な電流が生じることを抑制することである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20を駆動する電源回路ブロック12と、電流フィードバックの制御ブロック22と、制御装置40で構成される。制御装置40は、実変調度と、なまし変調度とを求める変調度取得部42と、実変調度となまし変調度の間について予め定めた所定条件に基づいて、PWM制御モードと過変調制御モードとの間で制御モードを切り替える制御モード切替部44を含んで構成される。
(もっと読む)
モータ駆動装置、それを用いたファン制御装置およびヒートポンプ装置
【課題】モータが運転停止後も慣性によって回転している状態から再起動する場合に、インバータへの過電圧や過電流などの異常を発生させずにモータを起動させることができるモータ駆動装置を提供する。
【解決手段】モータ駆動装置20では、マイクロコンピュータ30は、室内ファン15を駆動するファンモータ51を停止させる際、ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止する。ファンモータ51はブラシレスDCモータであって、起動後はロータ位置センサレス制御によって駆動される。ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止することによって、モータを再起動させるときの回転数は所定回転数以下となっている。
(もっと読む)
モータ制御装置
【課題】本発明の課題は、高い信頼性の基でモータの相短絡を検出することである。
【解決手段】直流電流を複数相の交流電流に変換し、かつ固定子巻線を有するモータに当該交流電流を出力するインバータ回路部と、前記モータに出力される前記交流電流を検出する電流センサと、前記電流センサにより検出された電流値を用いて前記インバータ回路部の駆動を制御する駆動制御部と、前記電流センサにより検出された電流値を取得し、当該電流値の単位時間当たりの変化率を検出する第1変化率検出器と、前記第1変化率検出器の検出結果を取得し、前記電流値の単位時間当たりの変化率が所定値以上であるか否かを判定する第1判定器と、を備え、前記第1判定器の判定結果に基づいて前記モータの前記固定子巻線の短絡を検出することを特徴とする。
(もっと読む)
モータ駆動装置及びこれを用いたモータ装置
【課題】電力効率の低下やS/Nの低下を招かずにロータ位置検出信号の自動利得制御を行うことが可能なモータ駆動装置、及び、これを用いたモータ装置を提供する。
【解決手段】本発明に係るモータ駆動装置1は、ロータ位置検出信号(ホール電圧信号HU+/HU−、HV+/HV−、HW+/HW−)が伝達される信号経路上に自動利得制御回路20を備えており、自動利得制御回路20は、入力信号(進角ホール電流信号AU+/AU−、AV+/AV−、AW+/AW−)を差動増幅して出力信号(増幅ホール電流信号IU、IV、IW)を生成するアンプ21と、前記出力信号(モニタ電流信号IUm、IVm、IWm)を監視してアンプ21の利得を決定する帰還制御部23と、を含む。
(もっと読む)
モータ駆動装置、モータ装置及びモータの駆動方法
【課題】従来に比して一段と確実に過負荷による駆動段パワー素子の破壊を防止することができるモータ駆動装置、モータ装置及びモータの駆動方法を提案する。
【解決手段】モータの駆動電流値と電流制限値との比較結果による駆動信号の制御により、駆動電流値が電流制限値に立ち上がると駆動電流の供給を停止し、駆動電流値の電流制限値への立ち上がりによる駆動信号の制御により、駆動電流値が電流制限値に立ち上がる場合には、一定の時間間隔で駆動信号の供給を停止するようにして、駆動電流値が電流制限値に立ち上がる頻度に応じて駆動信号の供給を停止する期間を増減する。
(もっと読む)
1 - 20 / 246
[ Back to top ]