
Fターム[5H572FF03]の内容
Fターム[5H572FF03]の下位に属するFターム
Fターム[5H572FF03]に分類される特許
1 - 20 / 30
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するサーボモータ駆動装置
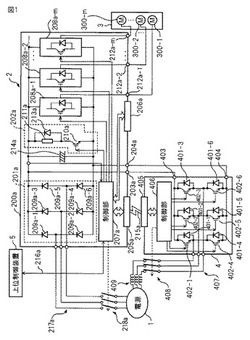
【課題】電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
(もっと読む)
モータ制御装置

【課題】同時に加速または減速する場合が高い頻度で発生する複数のモータを、共通電源の電源容量を増加させずに、サイクルタイムを減少させるような適切な加減速条件で動作させることができるモータ制御装置を得ること。
【解決手段】加減速パラメータ設定部3aは、電源供給部2から全モータに供給できる電力である供給可能電力の制限値または電源供給部2が全モータからの回生電力を処理できる電力である回生可能電力の制限値の範囲内で、動作指令8に含まれる指令移動量及び指令速度に基づき、2以上のモータのそれぞれに対する加減速パラメータ9を算出し、加減速処理部4aに設定する。
(もっと読む)
モータ制御装置
【課題】電力計等の専用の測定機器を用いることなしに、正確に消費電力の計測を可能にする抵抗回生方式のモータ制御装置を得ること。
【解決手段】抵抗回生方式のモータ制御装置において、モータに流れる電流に基づき該モータに発生するトルクもしくは推力を算出するトルク・推力算出部と、前記モータに流れる電流とモータ速度との一方または両方に基づき損失Lを算出し、前記モータ速度と前記トルク・推力算出部が算出したトルクもしくは推力との積から出力Wを算出し、瞬時電力Pを、損失Lと出力Wとの和L+Wが、L+W≧0のときはP=L+Wと算出し、L+W<0のときはP=0と算出する電力算出部とを備えた。
(もっと読む)
モータ制御装置
【課題】幅広い電源状態や負荷状態に対応して装置を駆動できるようにするモータ制御装置を提供する。
【解決手段】少なくとも二つ以上のモータを並列に駆動するモータ制御装置において、駆動電流の合計値の上限が所定の値を超えない一定値となるように、少なくとも一つ以上のモータについて時間とともにデューティ比を変更するデューティ制御を行うことを特徴とする。
(もっと読む)
モーター停止用の制御装置
【課題】複数のモーターが使用されているプロセスラインにおいて、連続材の破断を防止し、緊急時に、ラインの停止を早期に実現することができるモーター停止用の制御装置を提供する。
【解決手段】本制御装置は、ペイオフリール及びテンションリールの各コイル径情報と各モーターの回転数情報とが入力される入力部17と、各モーターの定格と各機械部の慣性モーメントとが予め記録された記録部18とを備える。停止時間演算部19は、各モーターについて、その時点におけるトルクで回生制動を実施した場合の停止時間を演算する。また、トルク制限値演算部20は、最大停止時間に合わせて停止させるためのトルク制限値を、各モーターについて演算する。そして、非常停止指令が入力されると、出力部21は、上記各トルク制限値を出力し、そのトルク制限値でトルク制限した回生制動を行わせる。
(もっと読む)
ハイブリッド式作業機械
【課題】複数の電動モータの負荷が同時に変動しても、電動モータの出力の変化を防ぐことができるハイブリッド式作業機械を提供する。
【解決手段】ハイブリッド式作業機械は、第1,第2,第3電動モータ5A,5B,5Cの電動モータ出力の変化量の総和が予め設定された設定値以下となるように、電動モータ5A,5B,5Cの電動モータ出力の変化量を制限する電動モータ出力指令変化量リミット部,電流制御部を備えている。これにより、第1,第2,第3電動モータ5A,5B,5Cの負荷が同時に変動しても、第1,第2,第3インバータ4A,4B,4Cに供給される直流電流の総和の変化量を低く抑えることができる。その結果、バスライン8の電圧の変動を低減できる。
(もっと読む)
部品実装機
【課題】装備されているモータが減速停止するときに生じる回生電力を有効利用して従来よりも消費電力を削減した部品実装機を提供する。
【解決手段】部品採取部材と基台との間に移動可能に介在されそれぞれモータ4X、4Zによって駆動される複数の移動部材2X、2Zを備え、部品採取部材が部品を採取および実装する部品実装機1において、各モータ3X、3Zが減速するときに運動エネルギを回生して生じた回生電力PR1〜PR3を制御する回生電力制御部6と、回生電力制御部6と電力をやりとりする各モータの電源部5X、5Zと、2つの移動部材2X、2Zが移動する場合に、一方の移動部材の減速停止の開始タイミングまたは減速停止中の所定タイミングに同期して他方の移動部材の始動加速を開始させ、一方のモータから得られる回生電力PR2を他方のモータの起動に利用する(駆動電力PZ)ように回生電力制御部6を制御する制御部7と、を備える。
(もっと読む)
電気車制御装置
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更を不要とし、電力変換回路の数を抑制して車体の振動乗り心地を改善する。
【解決手段】車体が搭載される2台の台車のうち,前方の台車の前方の車輪を駆動する電動機と後方の台車の前方の台車を駆動する電動機とが並列接続され,前方の台車の後方の車輪を駆動する電動機と後方の台車の後方の車輪を駆動する電動機とが並列接続され,2組の並列接続した電動機の組み合わせに対し逆方向の振動トルクが重畳するように制御することにより電動機のトルク変動を用いて2台の台車に同一の上下力を発生させてそれぞれの台車の上下振動を抑制することにより車体が前後線対称形状に弾性変形する振動を間接的に抑制することを特徴とする電気車制御装置。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
アクチュエータ
【課題】簡素な制御により、迅速でスムーズな加減速により高速度化を実現できる、直線案内軸受装置などに用いられると好適なアクチュエータを提供する。
【解決手段】第1駆動モータ109を目標速度に追従する速度制御とし,第2駆動モータ110は、第1駆動モータ109の実際の速度に追従するような速度制御を行うことにより,相互の動作が干渉しない形で2つの駆動モータ109,110をともにフィードバック制御することが可能となる。さらに第2駆動モータ110の速度制御において、第1駆動モータ109の指令値をフィードフォワードとして加えることで,制御による位相遅れを少なくしている。これにより制御の応答性,減衰性が向上するという利点がある。
(もっと読む)
平面モータ装置およびこの平面モータ装置を用いた位置決め装置
【課題】モータ電流指令値と実際電流との偏差が大きくても、加減速時など正常なドライバ動作時には電流偏差信号過大と認識しない、安定したインタロック機能を備えた平面モータおよびこの平面モータを用いた位置決め装置を実現する。
【解決手段】移動面に形成された固定子と、前記移動面に沿って移動する可動子とを備えた平面モータ装置において、前記可動子のモータ部10,11,12と、電流指令値Imu*,Imv*,Imw*が入力され、これらの電流指令値に応じたモータ電流Imu,Imv,Imwをモータ部に供給するドライバ部20,21,22と、電流指令値とモータ部に流れるモータ電流との電流偏差信号ΔImu,ΔImv,ΔImwが所定の閾値を超えたときにモータ部の駆動を制限する検出部30,31,32とを備え、検出部は、モータ部の加速度に応じ前記閾値を変化させる。
(もっと読む)
多軸機械装置及びその制御方法
【課題】 回生電力の損出をできるだけ少なくして回生電力を従来よりも有効に活用することができる多軸機械装置を提供する。
【解決手段】電源10とモータ制御回路1〜3との間に、少なくとも1つの駆動用モータが回生状態にあるときに、他の少なくとも1つの力行状態にある駆動用モータの駆動用電力として回生電力を利用するようにモータ制御回路1〜3相互と電源10との間の接続関係を切り換える接続関係切換回路11を設ける。動作タイミング出力部6は、少なくとも1つの駆動用モータが回生状態にあるときに、他の少なくとも1つの駆動用モータが力行状態における加速状態にある重合期間を含むように構成された動作タイミングを出力する。接続関係切換回路11は、重合期間において、回生状態にある駆動用モータが発生する回生電流を力行状態にある駆動用モータに負荷電流として供給するように切換動作をする。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走時の連れ回りに対する全く新しい制御方式による解決手法を提案すること。
【解決手段】 力行時には、制御対象2軸のうち、進行方向最後方の第2軸の電動機IM_2のトルク成分電流から、進行方向最前方の第1軸の電動機IM_1のトルク成分電流を減算した電流差ΔIq_rを用いた制御を行う。具体的には、空転滑走の発生を検知した場合に、その検知時の電流差ΔIq_rを保持し、これに所定の係数K1を乗じた値を連れ回り防止引き下げ指令Iq_Rとして、トルク成分電流指令値Iq*からの引き下げ指令とする。
(もっと読む)
数値制御装置
【課題】サーボモータを駆動することなく、常に電源電圧と負荷トルク及び総イナーシャのいずれか1つ以上とに応じた最適な加減速時間または最高速度を予め指令する。
【解決手段】動作プログラムに従い、1つまたは複数のサーボモータの駆動制御を行うことによりワークを加工する数値制御装置において、電源電圧を常時監視する電源電圧監視部7と、負荷トルク及び総イナーシャのいずれか1つ以上を予め設定するパラメータ設定部12と、監視した電源電圧と予め設定した負荷トルク及び総イナーシャのいずれか1つ以上とに応じてサーボモータの駆動制御時の加減速時間または最高速度を演算する動作条件演算部9とを設け、この演算された加減速時間または最高速度に従ってサーボモータの位置指令を演算する。
(もっと読む)
ブレーキ応答性の車両電気駆動装置
【課題】車両ブレーキの作動に応答するか又は調和する車両電気駆動装置の提供。
【解決手段】本発明は車両電気駆動装置に関し、ブレーキ応答性の車両電気駆動装置の必要性に答えるものである。本願発明の車両電気駆動装置は、内燃機関12と、当該内燃機関によって駆動される電気モーター/発電機14と、牽引モーター/発電機24,28によって駆動される駆動車輪26,30とを含んでいる。モーター/発電機14は、制御装置によって制御される。当該制御装置は、運転者による速度制御部材36、車両速度センサー、及び、各々、対応する左及び右のブレーキペダル57,59に結合されている一対のブレーキペダル位置センサー58,60から信号を受け取る。ブレーキペダルの作動に応答して、コントローラは、電気駆動装置の動作をブレーキペダルの動作に調和させる。
(もっと読む)
ランプ製造装置
【課題】ランプ製造に際して各種工程における各加工装置が精度よく同期動作できるようにするとともに、コストの増大を抑制することができるランプ製造装置を提供する。
【解決手段】ランプ製造装置100は、封止装置41等の加工装置、マスター31、伝送路33を備える。マスター31は、基準位相角度生成手段51、パルス信号生成手段52を備え、基準位相角度を生成し、基準位相角度に対応するパルス信号をスレーブ32に出力する。パルス信号は、予め定められた特定パルス列に当てはめて出力される。スレーブ32は、基準位相角度復元手段53、加減速信号出力手段54、インバータ55を備え、基準位相角度復元手段53は、入力されたパルス信号からなる参照パルス列から基準位相角度を復元する。復元された基準位相角度とモータ56の機械軸の位相角度等とに基づいて、インバータ55に加減速信号を出力し、モータ56の機械軸を制御する。
(もっと読む)
洗濯乾燥機のモータ駆動装置
【課題】ヒートポンプ式洗濯乾燥機のモータ駆動装置の交流電源電流を減らす。
【解決手段】交流電源1よりリアクタ2を介して整流回路3の一方の端子に接続し、整流回路3の入力端子間に短絡手段4を接続して力率補正回路を構成し、整流回路3の出力直流母線間に第1および第2のインバータ回路5A、5Bを接続して制御手段6により洗濯脱水モータ8と圧縮機モータ10、および短絡手段4を制御する。制御手段6は直流母線電圧を検出する直流電圧検知手段60の信号に応じて短絡手段4の導通を制御する電圧制御手段61により直流母線電圧を洗濯乾燥各行程に応じて制御し、さらにインバータ制御手段62により洗濯脱水モータ8、あるいは圧縮機モータ10の回転数を制御し交流電源電流が所定値以下となるように出力制御する。
(もっと読む)
誘導機制御装置
【課題】 複数台誘導機一括制御において、誘導機間の速度差が大きくなると、誘導機速度に演算誤差が生じ、誘導機実すべりが拡大し、誘導機が脱調状態に陥る。
【解決手段】 推定すべりとすべり指令を入力し誤差率を出力するすべり差演算器と、誤差率を積分し誤差時間を出力する積分器と、時間設定値と誤差時間を比較し検知信号を出力する比較器と、運転指令と検知信号から制御指令を作成する運転論理器を新たに追加し、運転指令の代わりに制御指令をトルク制御手段に入力する。誘導機が脱調状態となる前に、一部車輪軸の空転、滑走が大きくなったことを検知でき、誘導機のトルク制御を停止させることができる。一部車輪軸の空転、滑走の度合いにより、検知するまでの時間を変えることができる。
(もっと読む)
サーボアンプおよび表面実装機
【課題】サーボアンプのコンパクト化を図りつつ、メンテナンス性を向上させることができるサーボアンプおよび表面実装機を提供する。
【解決手段】複数のモータ14、15と、サーボ制御部および駆動回路部を含み、各モータ14等を制御するサーボアンプ22とを備えた表面実装機の前記サーボアンプ22に関する。サーボアンプ22は、それぞれ2つのモータ14(15)に対応するサーボ制御部および駆動回路部が配置された複数のサブ基板22bと、これらサブ基板22bが着脱可能に組み付けられるベース基板22aとから構成される。ベース基板22aには、モータ駆動用のヘッドユニット側動力ケーブルおよびヘッドユニット側ケーブル等がコネクタを介して接続され、これら各線と各サブ基板22bとを結線するためのバス回路が形成されている。
(もっと読む)
同期制御システム
【課題】 複数のモータを同期運転する同期制御システムにおいて、位置決めの短縮と電源回生による省電力化、システム構成の小形化を図ることができる同期制御システムを提供する。
【解決手段】 加速度指令に基づいて補償トルク指令を生成する補償トルク演算部と、前記補償トルク指令とトルク指令に基づいて減速トルク指令を生成する減速トルク演算部と、前記補償トルク指令あるいは前記減速トルク指令のいずれかを選択する切替部と、を有した上位装置と、複数の駆動装置の直流電源入力に、共通に接続する電源回生用コンバータと、を備える。
(もっと読む)
1 - 20 / 30
[ Back to top ]