
Fターム[5H572LL31]の内容
Fターム[5H572LL31]の下位に属するFターム
Fターム[5H572LL31]に分類される特許
1 - 20 / 49
サーボドライブシステム
【課題】 サーボ制御の制御応答性を高め、制御装置の各軸の特性に応じて、制御演算部をサーボアンプ又はサーボコントローラに分配可能なサーボドライブシステムを提供する。
【解決手段】 本発明のサーボドライブシステムは、軸毎にサーボモータを制御するサーボ制御部が、サーボモータの指令を生成するプロファイル生成部と、サーボモータの位置を制御する位置制御部と、サーボモータの速度を制御する速度制御部と、サーボモータのモータ電流を制御する電流制御部と、を有し、プロファイル生成部、位置制御部、速度制御部及び電流制御部は、軸毎にサーボアンプ又はサーボコントローラにそれぞれ分配されている。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置

【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
モータ制御装置
【課題】応答性がよく、安定したタンデム制御によるモータ制御を行なうことができるモータ制御装置を提供する。
【解決手段】マスタ軸モータと少なくとも一つのスレーブ軸モータとを用いて、一つの軸を駆動するタンデム方式のモータ制御装置であって、モータ毎に位置制御部1と速度制御部2と電流制御部3とを具備し、さらにスレーブ軸にはマスタ軸のトルク指令値Tm*とスレーブ軸のトルク指令値とからスレーブ軸の調停トルク指令値Ts1*を算出するトルク調停部5と、スレーブ軸には上位制御装置からの指令の反転を検出する指令反転検出部23と、を備え、指令反転検出部23は、上位制御装置からの指令の反転を検出した場合、指令反転直前の調停トルク指令値Ts1*をスレーブ軸の速度制御部2の積分成分に設定することにより達成される。
(もっと読む)
駆動制御装置
【課題】第一インバータ及び第二インバータからの合計リップル電流を低減して、コンデンサ及び直流電源線の発熱量を低減する駆動制御装置が求められる。
【解決手段】第一電動機に接続された第一インバータと、第二電動機に接続された第二インバータと、共通の直流電源と、直流電源に並列接続されたコンデンサと、を備えた駆動装置を制御する駆動制御装置であって、第一キャリア波を用いたパルス幅変調により、第一インバータのスイッチング素子をオンオフ制御する第一制御信号生成部と、第一キャリア波と同じ周波数の第二キャリア波を用いたパルス幅変調により、第二インバータのスイッチング素子をオンオフ制御する第二制御信号生成部と、2つの電動機が、共に力行する状態、又は共に回生する状態である場合に、第一キャリア波の位相と第二キャリア波の位相とを互いに4分の1周期ずらすキャリア位相制御部と、を備える駆動制御装置。
(もっと読む)
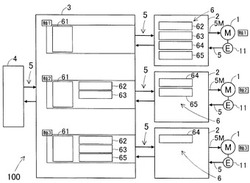
射出成形機
【課題】求められる制御精度がそれぞれ異なる複数のサーボモータをより効率的に集中制御する多軸サーボドライバを搭載する射出成形機を提供すること。
【解決手段】四つのサーボモータM1〜M4を集中制御する多軸サーボドライバEQを搭載する射出成形機において、その多軸サーボドライバEQは、それら四つのサーボモータM1〜M4のそれぞれに関する演算のために用いられる一のCPU資源を備える。また、その多軸サーボドライバEQは、それら四つのサーボモータM1〜M4の制御周期を個別に設定する制御周期設定部C13を備え、成形サイクル中にそれら四つのサーボモータM1〜M4のうちの少なくとも一つの制御周期が変化するように、それら四つのサーボモータのそれぞれの制御周期を設定することができる。
(もっと読む)
モータ制御システム
【課題】1つの外部位置検出器からの位置情報により、複数のモータ動作を制御可能とするモータ制御システムを提供する。
【解決手段】モータ駆動装置A12aは、外部位置検出器19aから位置情報を取り込む外部位置検出器接続手段16aと、取り込んだ位置情報を他のモータ駆動装置12に送信し、位置指令を前期上位制御装置11から受信するシリアル通信手段13aと、前記位置指令と前記位置情報との差が無くなるようにモータ動作を制御するモータ制御手段18aを備え、モータ駆動装置B12bは、前記モータ駆動装置A12aから送信された位置情報を受信し、さらに位置指令を前期上位制御装置11から受信するシリアル通信手段13bと、前記位置指令と前記位置情報との差が無くなるようにモータ動作を制御するモータ制御手段18bを備え、1つの外部位置検出器からの位置情報により、複数のモータ動作を制御する。
(もっと読む)
電子機器
【課題】駆動開始条件が満足されたモータの駆動制御を迅速に開始可能とする。
【解決手段】画像形成装置のCPUは、モータ制御タスクK1及びスケジュール管理タスクK3の実行により、印刷指令に基づく用紙への画像形成動作を、複数のモータの駆動制御により実現する。具体的に、モータ制御タスクK1は、スケジュール管理タスクK3により設定された駆動開始条件の満足されたモータの駆動制御を開始する。この際、モータ制御タスクK1は、入力インタフェースを介してハードウェア信号を直接取得し、この取得信号に基づき、駆動開始条件が満足されたか否かを判断する。一方、スケジュール管理タスクK3は、印刷指令に対応する画像形成処理を実現するために必要な各モータの動作スケジュールを生成し、この動作スケジュールに従って、順次、駆動すべきモータの駆動開始条件及び制御パラメータを、モータ制御タスクK1に対して設定する。
(もっと読む)
駆動制御装置、駆動制御方法及び記録装置
【課題】モーターを用いる変位部材の変位速度の制御性を向上させることができる駆動制御装置、駆動制御方法及び記録装置を提供する。
【解決手段】キャリッジ17を主走査方向に移動させるための駆動制御装置は、B方向に回転した場合にキャリッジ17を主走査方向における一方側に移動させるための第1駆動力を発生する第1CRモーター20と、A方向に回転した場合にキャリッジ17を主走査方向における他方側に移動させるための第2駆動力を発生する第2CRモーター22と、キャリッジ17に伝達される第1駆動力及び第2駆動力の大きさを調整すべく各CRモーター20,22を制御する制御部51とを備えている。
(もっと読む)
ロボット関節のための統合高速トルク制御システム
【課題】ロボットの関節の制御システムであって、高速トルクを達成し、かつノイズに強い制御システムを提供する。
【解決手段】並置関節プロセッサ及び高速通信バスを有する印刷回路基板アセンブリ(PCBA)30を含んでいる。PCBAは、また、パワーインバータモジュール(PIM)34と、1つ以上のモータ位置センサからのセンサデータを処理するためのセンサ調整電子素子(SCE)36とを含んでいる。関節のモータのトルク制御は、高速トルクループとしてPCBAにより提供される。各関節プロセッサは、制御されるべきロボット関節内に組み込まれるか、又はそれに並置されている。関節プロセッサ、PIM、及び高速バスの並置により、制御システムの雑音イミュニティが増し、関節モータ40からのセンサデータの関節レベルの局所的処理により、各制御ノードに対する往復のバスケーブルを最短にすることができる。
(もっと読む)
可動物体の位置を制御する方法、位置決め装置を制御する制御システム、およびリソグラフィ装置
【課題】さまざまなタイプのモータを同一の可動物体の作動のために使用でき、かつそのようなモータの使用による望ましくない効果を回避するアクチュエータ構成および制御を提供する。
【解決手段】少なくとも1つのリラクタンスモータを介して所定の自由度で変位可能な位置決め装置を制御する制御システムが、少なくとも1つの力感知素子と、リラクタンスモータによって加えられた力の量を感知する対応する力感知素子からの出力に基づいて、リラクタンスモータによって加えられた力の量を調整するコントローラとを含む。
(もっと読む)
画像形成装置
【課題】回転多面鏡における回転速度の微調整幅の高分解能化と、回路の規模の簡略化とを両立させる。
【解決手段】回転状態検知手段は、回転多面鏡の回転状態を検知し、回転状態を示す回転状態信号を出力する。第1クロック生成手段は、第1クロックを生成する。回転基準信号生成手段は、第1クロックにしたがって順序回路動作を行い、回転多面鏡の回転基準となる回転基準信号を生成する。第2クロック生成手段は、回転基準信号の周期よりも短く、かつ、第1クロックの周期よりも長い周期の第2クロックを生成する。受信手段は、第2クロックにしたがって順序回路動作を行い、回転基準信号を受信する。位相差測定手段は、第2クロックにしたがって回転状態信号と回転基準信号との位相差を測定する。制御手段は、位相差に基づいて駆動手段に加速信号または減速信号を供給する。
(もっと読む)
アクチュエータ駆動装置
【課題】アクチュエータ駆動装置に対し、1サーボ演算ルーチンの処理時間を短縮させてサーボ動作帯域を向上させ、より複雑で高度な演算処理を行った場合でもサーボ動作帯域を確保する。
【解決手段】半導体の検査装置又は製造装置の試料移動台をサーボ制御するためのアクチュエータを駆動させるアクチュエータ駆動装置において、前記アクチュエータの1駆動軸又は複数駆動軸に対して、複数の演算機を用いてソフトウェア・サーボにより駆動させる構成を有することを特徴とする。また、前記ソフトウェア・サーボを複数にブロック化して、各々のブロックをソフトウェア・サーボの演算スケジュールに則り前記複数の演算機にて分散処理させる。
(もっと読む)
モータ駆動装置及び光学制御装置
【課題】高速駆動が可能で、かつ、複数のモータ駆動時における精度劣化を抑制するモータ駆動装置を提供する。
【解決手段】モータ駆動装置は、第1コイルへの通電の切り替えによって回転する第1ロータを備えた第1モータ108と、第1モータ108を駆動する第1ドライバ107と、第2コイルへの通電の切り替えによって回転する第2ロータを備えた第2モータ111と、所定の時間間隔に従って第2モータ111の第2コイルへの通電を切り替える第2ドライバ109と、位置センサ112の出力に応じて第2モータ111の第2コイルへの通電を切り替える第3ドライバ110と、第1モータ108を駆動するとともに第2モータ111を駆動する際には、第3ドライバ110ではなく第2ドライバ109で第2モータ111を駆動するように制御する制御回路105とを有する。
(もっと読む)
電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法
【課題】垂直軸や外力が掛かる状況で大きなストロークで使用する電動機が含まれる複数軸の軸間を含む機械特性を多軸伝達関数として測定するとともに、制御器の安定度を把握し、機械特性に合わせた軸間を含めた制御器の調整度合いを把握できる相互一巡開ループ伝達関数を算出する電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法を提供する。
【解決手段】複数軸の電動機制御装置において、自己一巡開ループ伝達関数算出部8と、相互一巡開ループ伝達関数算出部9と、機械特性演算部11と、特性演算部10と、を備える。
(もっと読む)
拡張されたダイナミックレンジに亘ってトルクを迅速に発生させるための、低イナーシャを有する装置
本発明は、トルク設定点に応じて出力部材(3)上にトルクを発生させるための装置に関し、装置は、出力部材が連結されるシャフト(2)を有する、第1動力の少なくとも一つのモーター(1)又は少なくとも一つの小モーターを含む第1モーターユニットと、結合手段(4)を介して出力部材に回転可能に連結されるシャフト(12)を有する、第1動力よりも高い第2動力の少なくとも一つのモーター(11)又は少なくとも一つの大モーターを含む第2モーターユニットと、サーボ制御手段(50)とを含み、サーボ制御手段(50)は、トルク設定点(Msp)に応じて、粘性結合手段が、トルク設定点に適合する粘性トルク(Mvisc)を提供するように第2モーターユニット(11)に動力を与え、且つ、これと並行して、第1モーターユニット(1)が、粘性トルクがトルク設定点の値に到達するまで、トルク設定点と粘性トルクとの間の付加トルクを生成するように第1モーターユニット(1)に動力を与えるべくプログラムされる。 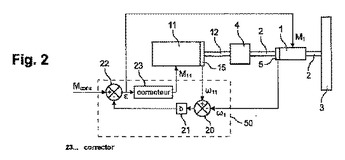 (もっと読む)
(もっと読む)
モータ同期制御装置
【課題】各軸の制御入力が制限を受けた場合であっても、高精度に各軸の同期を維持することを可能とするモータ同期制御装置を得ること。
【解決手段】2軸以上のモータを個別に駆動する2以上のモータ駆動制御装置のそれぞれが生成する、各軸に共通の位置指令と自軸モータで検出された位置検出値との差分である自軸モータの位置偏差を補正する位置補正量を入力とし、前記2以上の位置補正量のうち最も応答の遅い位置補正量を同期後位置補正量として選択する整形量同期部4aを備え、前記2以上のモータ駆動制御装置のそれぞれは、自軸の前記位置偏差から前記同期後位置補正量を減算した修正位置偏差を用いて自軸モータへの制御入力を計算することを特徴とする。
(もっと読む)
モータ装置
【課題】必要とする出力に応じて効率よく駆動することが可能なモータ装置を提供する。
【解決手段】第1ギアが設けられた出力軸と、前記第1ギアと噛み合う第2ギアを備え当該第2ギアを駆動するためのモータと、前記モータが取り外し可能に装着される複数のモータ装着部と、を備え、前記複数のモータ装着部のいずれかに、前記モータが装着されている。
(もっと読む)
リニアアクチュエータの同期制御装置と方法
【課題】4本以上のリニアアクチュエータにより剛体の3次元位置を制御することができ、各リニアアクチュエータに過負荷検出手段を取り付けることなく、作動時及び静止時の両方において、各リニアアクチュエータの過負荷を防止できるリニアアクチュエータの同期制御装置と方法を提供する。
【解決手段】単一の剛体1に同一直線上に位置しない3点b,c,dで連結されかつ互いに平行な駆動軸B,C,Dを有し、駆動軸の軸方向位置を制御し推力Fb,Fc,Fdを検出可能な3本の位置制御リニアアクチュエータ10と、剛体1に連結されかつ駆動軸B,C,Dと平行な推力軸Aを有し、推力軸Aの軸方向推力Faを制御可能な1本以上の推力制御リニアアクチュエータ20と、3本の位置制御リニアアクチュエータ10の推力Fb,Fc,Fdから推力制御リニアアクチュエータ20の推力を設定する推力設定装置30とを備える。位置制御リニアアクチュエータ10と推力制御リニアアクチュエータ20により剛体1の3次元位置を制御する。
(もっと読む)
モータ制御システムおよびその接続判定方法
【課題】2台のサーボアンプを通信ケーブルで接続するだけでマスター、スレーブの設定ができ、簡便に同期制御がおこなえるモータ制御システムを提供する。
【解決手段】サーボアンプ1(2)は、双方向通信手段17(28)の一方に駆動するサーボモータ3(4)のエンコーダ通信ケーブル5(6)が接続され、他方の双方向通信手段18と双方向通信手段27を通信ケーブ7で接続しており、装置コントロール部11(21)は、通信開始時のみ、出力するセレクタ切替信号11e(21e)によってセレクタ16(26)で双方向通信手段17,18(27、28)と信号レベル制御部14または信号レベル検出部15とを接続し、同期制御におけるマスター、スレーブを自動判定する。
(もっと読む)
同期制御装置
【課題】高周波のノイズ成分を増大させることなく主状態量のフィードバック値に含まれる位相の遅れ分をキャンセルするように位相を進め,現在の正確な主状態量が得られなくても,従制御対象の状態量を振動や遅れなく精度良く主制御対象の状態量に追従できる同期制御装置を提供する。
【解決手段】 主状態量が主状態量指令に一致するように主操作量を生成する主制御器と,前記主状態量と前記従状態量が同期するように従状態量指令を生成する従状態量指令生成器と,従状態量が従状態量指令に一致するように従操作量を生成する従制御器と,を備えた同期制御装置において,従状態量指令生成器は,主操作量と前記主状態量に基づいて主状態量よりも位相の進んだ位相進み主状態量を生成する位相進み補償演算器(11)と,位相進み主状態量を前記従状態量指令に変換する指令変換器(15)とを備えた
(もっと読む)
1 - 20 / 49
[ Back to top ]