
Fターム[5H680AA08]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 目的、効果 (1,903) | 正逆転 (57)
Fターム[5H680AA08]に分類される特許
1 - 20 / 57
超音波リニアモータおよび駆動・案内装置
【課題】 コンパクト化、低コスト化、エネルギー消費量の低減を図るとともに、振動エネルギーを大きくして質量の大きい搬送物でも搬送可能とした超音波リニアモータおよび駆動・案内装置を提供すること。
【解決手段】 振動梁3に進行波を励起し、その振動によりスライダ11を駆動する超音波リニアモータにおいて、前記振動梁3の一方の端部に2組以上、他方の端部に一方の端部と同数組以上の駆動素子911、912、921、922が付加されていて、略共振する駆動源1、2が構成されていることを特徴とする超音波リニアモータおよび前記超音波リニアモータを用いた駆動・案内装置である。
(もっと読む)
圧電アクチュエーター、及び、圧電アクチュエーターの駆動方法

【課題】エネルギー効率の改善及び構成の簡素化を図る。
【解決手段】圧電素子を有し、駆動信号が圧電素子に供給されることによって振動する振動体であって、長辺方向の長さと短辺方向の長さとの比が略n対1(nは2以上の整数)の矩形の平面形状の振動体と、振動体に設けられた当接部であって、振動体の振動に応じて被駆動体に当接する当接部と、を備え、振動体を第1周波数で矩形の長辺方向へ伸縮させる第1振動、及び、振動体を第1周波数とは異なる第2周波数で矩形の短辺方向へ伸縮させる第2振動、を駆動信号によって発生し、第1振動及び第2振動に基づいて、当接部を被駆動体に当接させて被駆動体を駆動する。
(もっと読む)
注入機器及び超音波モータの制御方法
【課題】超音波モータのステータとロータの固着を効率的に解除することができる注入機器を提供する。
【解決手段】 本発明の注入機器は、薬液を注入するための注入機器1であって、超音波モータ31を有する超音波モータ部3と、超音波モータ31が正転するときに薬液を送り出すように、超音波モータ部3によって駆動される駆動機構4と、超音波モータ部3の超音波モータ31を制御する制御装置5とを備え、超音波モータ31は、ステータ32及びロータ33を有し、制御装置5は、ステータ32とロータ33の固着を解除するために、超音波モータ31が正転と逆転を交互に繰り返すように制御する。
(もっと読む)
注入機器及び超音波モータの制御方法
【課題】超音波モータのステータとロータの固着を効率的に解除することができる注入機器を提供する。
【解決手段】 本発明の注入機器は、薬液を注入するための注入機器1であって、超音波モータ31を有する超音波モータ部3と、超音波モータ31が正転するときに薬液を送り出すように、超音波モータ部3によって駆動される駆動機構4と、超音波モータ部3の超音波モータ31を制御する制御装置5とを備え、超音波モータ31は、ステータ32及びロータ33を有し、制御装置5は、ステータ32とロータ33の固着を解除するために、超音波モータ31が正転と逆転を交互に繰り返すように制御する。
(もっと読む)
圧電アクチュエーター、ロボットハンド、及びロボット
【課題】安定した状態で確実に起動し安定駆動状態を維持することができる圧電アクチュエーターを実現する。
【解決手段】圧電アクチュエーター100は、圧電素子11を含む振動体1と、振動体1に設けられローター2に当接する摺動部15と、圧電素子11に駆動信号を供給する駆動回路26と、駆動信号と振動体1の振動に基づいて検出される検出信号との位相差を検出する位相差検出回路27と、駆動信号の周波数及び電力を制御する周波数制御器20とを備え、周波数制御器20は、周波数を変化させて、位相差が所定の範囲内となった場合に電圧を上限電圧値に設定し、位相差が所定の範囲外にある場合には電圧を上限電圧値よりも小さい下限電圧値に設定することを特徴とする。
(もっと読む)
圧電アクチュエーター、ロボットハンド、及びロボット
【課題】ローターの回転速度の変動を抑えて安定した回転を得ることができる圧電アクチュエーターを実現する。
【解決手段】圧電アクチュエーター100は、圧電素子11を含む振動体1と、円盤形状を有するローター2と、振動体1の一端から突出しローター2に当接する摺動部15と、圧電素子11に駆動信号を供給する駆動制御部5とを備え、駆動制御部5は、予め取得した駆動開始からの時間経過に伴うローター2の回転速度の目標値に対する差異の変化に基づいて、駆動信号の周波数を変化させて回転速度を制御する。
(もっと読む)
圧電アクチュエータ
【課題】接触部の振動軌跡の形状や向きを任意に変更できる圧電アクチュエータを提供すること。
【解決手段】圧電アクチュエータ1は、縦振動および屈曲振動の二つの振動モードの組み合わせにより振動する圧電素子で構成された振動体10を有し、この振動体10には、縦振動を励振させる第1駆動信号印加用の第1駆動電極11と、屈曲振動を励振させる第2、第3駆動信号印可用の第2、第3駆動電極12,13とが設けられ、第2駆動信号の位相を任意に調整する位相調整手段33を備えている。
(もっと読む)
超音波モータ
【課題】起動時ロータに作用する負荷にかかわらず確実に起動する超音波モータを提供することを目的としている。
【解決手段】
摩擦駆動体32は、回転軸12の円周方向に沿って形成される。ロータ11は、回転軸12に支持され、摩擦駆動体32に摩擦係合している。ロータ11は、摩擦駆動体32の振動によって回転軸12の軸心周りに回転する。動力伝達部52は、ロータ11に生じた回転力を、回転軸12を介して被駆動部材50に伝達する。動力伝達部52は、起動時に回転軸12の回転力を被駆動部材50に伝達しない一定の無負荷区間を有する。
(もっと読む)
圧電アクチュエーター、ロボット及びロボットハンド
【課題】駆動電圧を印加する電極を切り換えずに正転と逆転の切り換えが可能な圧電モーターを実現する。
【解決手段】圧電体層120と圧電体層120に駆動電圧を印加可能な電極121とを含む圧電素子22と、圧電素子22と積層される短辺と長辺とを有する長方形の板材であり、かつ長辺方向の一方の端部から平面方向に突出する突出部23を有する振動板21と、突出部23に当接されるローター100と、を少なくとも備える圧電アクチュエーター1であって、突出部23は振動板21の略中心を通り長辺方向に延在する第1の中心線71からオフセットされた位置に配置されており、振動板21は、突出部23が配置された位置の略対角位置にカウンターウェイト25を備えていることを特徴とする圧電アクチュエーター1。
(もっと読む)
駆動装置
【課題】移動体が正常に動作可能な移動ストロークを広げる。
【解決手段】駆動装置1は、振動することによって駆動力を出力するアクチュエータ本体4と、アクチュエータ本体4が当接しており、アクチュエータ本体4に対して所定の移動方向に相対的に移動可能な移動体11と、移動体11を挟んでアクチュエータ本体4と対向する位置に配置され、4アクチュエータ本体と共に移動体11を挟持するローラ6とを備えている。移動体11のうち、ローラ6と当接する部分は、ローラ6よりも弾性係数が小さい。
(もっと読む)
モータ装置及び回転子の駆動方法並びにロボット装置
【課題】高トルクを発生させることができるモータ装置を提供する。
【解決手段】回転子と、回転子の外周の少なくとも一部に掛けられた伝達部と、伝達部に接続され、印加された駆動電圧に応じて伝達部を移動させる複数の駆動部と、回転子と伝達部との間を回転力伝達状態とする保持力に対応する第1駆動波形を備える第1駆動電圧と、伝達部を移動させる駆動力に対応する第2駆動波形を備える第2駆動電圧とを複数の駆動部にそれぞれ印加させて、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させる駆動動作及び回転力伝達状態を解消した状態で伝達部を所定の位置に戻す復帰動作を駆動部に行わせる制御部と、を備える。
(もっと読む)
モータ装置、回転子の駆動方法及びロボット装置
【課題】高トルクを発生させること。
【解決手段】回転子と、当該回転子の外周の少なくとも一部に掛けられた伝達部と、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させると共に回転力伝達状態を解消した状態で伝達部を所定位置に復帰させる駆動部と、伝達部及び駆動部の少なくとも一方の振動を減衰させる弾性部とを備える。
(もっと読む)
振動型アクチュエータの制御装置及び制御方法
【課題】 ロータの回転方向を切り替える際、ロータの速度変動や可聴音が生じる可能性があった。
【解決手段】 本発明の振動型アクチュエータの制御装置は、第1の交流電圧を振動体に印加することによって前記振動体の接触部に生成する第1の楕円運動と、第2の交流電圧を前記振動体に印加することによって前記接触部に生成する、前記第1の楕円運動とは異なる向きに回転する第2の楕円運動と、の合成によって、前記振動体と前記振動体の接触部に接触する移動体とを相対移動させる。そして、前記第1の交流電圧と前記第2の交流電圧とを前記振動体に印加する電圧供給手段を有し、前記電圧供給手段は、前記相対移動の速度指令に応じて前記第1の楕円運動の振幅と前記第2の楕円運動の振幅との差を変化させるように、前記第1の交流電圧の振幅と前記第2の交流電圧の振幅とを夫々変化させることを特徴とする。
(もっと読む)
超音波発生装置及び超音波発生方法
【課題】簡単且つ安価な構造で、振動振幅の大きな弾性表面波を効率よく励振できる超音波発生装置、及び超音波発生方法を提供する。
【解決手段】圧電基板15と、圧電基板15の表面に設けられたすだれ状電極(14a,14b)と、すだれ状電極(14a,14b)を構成する第1の櫛形電極14aと第2の櫛形電極14bとの間にパルス状の駆動電圧を印加するスイッチング素子13と、スイッチング素子13の制御電極にパルス電圧を出力するゲート駆動回路12とを備える。
(もっと読む)
圧電アクチュエータ、レンズ鏡筒およびカメラ
【課題】摩擦や擦れの生じにくい圧電アクチュエータを提供する。
【解決手段】本発明の圧電アクチュエータは、ベース部材(11)と移動部材(12)との間に設けられ、前記ベース部材(11)の第1面(11a)と交差する交差方向に伸縮可能な第1圧電素子(23a)および第2圧電素子(23b)と、前記ベース部材(11)と前記移動部材(12)との間に設けられ、前記交差方向とは異なる方向に伸縮可能な第3圧電素子(24a)および第4圧電素子(24b)と、前記第1圧電素子(23a)、第2圧電素子(23b)、第3圧電素子(24a)および第4圧電素子(24b)の伸縮量が伝達され、前記移動部材(12)に駆動力を伝達する伝達部材(21、22)とを備えることを特徴とする。
(もっと読む)
ピエゾアクチュエータ駆動方法、ピエゾアクチュエータ制御回路、及び防振制御回路
【課題】ピエゾアクチュエータの駆動において、異音が生じることがある。
【解決手段】パルス生成回路26は、ピエゾ素子14に印加する駆動パルスとして、レンズ8を所定のステップ幅変位させるデューティ比を有した変位用パルスと、レンズ8を現在位置に停留させるデューティ比を有した停留用パルスとを選択的に生成することができる。パルス生成回路26は、サーボ制御周期内での複数回連続する駆動パルスの発生を制御し、所要変位量の残余量が所定の閾値以上である場合、変位用パルスを発生させ、一方、前記残余量が前記閾値未満となった場合、次のサーボ制御周期の開始まで停留用パルスを持続的に発生させる。
(もっと読む)
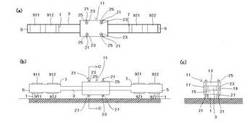
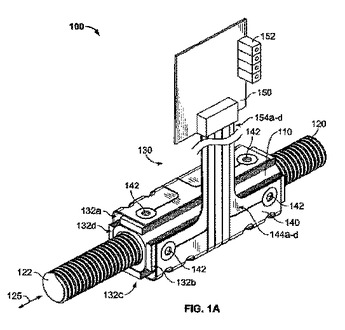
減電圧リニアモータシステムおよびその方法
リニアモータシステムが、螺刻された通路を有する要素と、螺刻されたシャフトと、駆動システムとを含む。螺刻されたシャフトは、螺刻された通路の少なくとも一部を通して延在しかつそれと少なくとも部分的に係合されている、回転軸を有する。駆動システムは、要素に動作可能に接続された少なくとも2つの部材を備える。2つの部材はそれぞれ、2つ以上の圧電層と、圧電層のそれぞれの対向する表面に連結されている電極とを備える。部材は、回転軸に沿った方向に拡張および収縮するように構成されている。駆動システムは、要素に振動を与え、螺刻されたシャフトを、要素を通して、同時に、回転、および回転軸に沿った方向に平行移動させ、かつ回転軸に沿った方向に軸方向力を印加するように構成されている。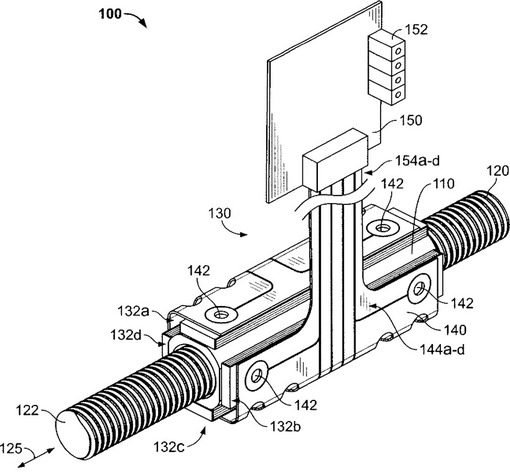
 (もっと読む)
(もっと読む)
振動型モータ制御装置及びそれを用いた光学機器
【課題】 環境条件や負荷条件、個体差に影響されにくい速度制御を行うことができる振動型モータの速度制御方法を提供する。
【解決手段】 振動型モータに印加される駆動用周波信号の位相差、周波数、または振幅を変更して回転速度を制御する速度制御手段と、振動体に発生する振動を検出する振動検出手段と、前記振動検出手段と前記駆動用周波信号との位相差を検出する位相差検出手段と、を有する振動型モータ制御装置において、
前記位相差検出手段からの信号に基づいて前記速度制御のいずれかを実行するものである。
(もっと読む)
駆動装置
【課題】駆動効率が高く、外力に強い駆動装置を提供する。
【解決手段】駆動装置1は、電圧が印加されると伸縮する第1電気機械変換素子3と、第1電気機械変換素子3に一端が固定された振動部材4と、振動部材4の他端に固定され、電圧が印加されると伸縮する第2電気機械変換素子5と、振動部材4にスライド移動可能に摩擦係合する摩擦係合部材6とを有し、第2電気機械変換素子5にのみ電圧を印加したときの振動部材4の振動の共振点が、第1電気機械変換素子3にのみ電圧を印加したときの振動部材4の振動の共振点の約2倍の周波数となるようにする。
(もっと読む)
撮像装置、交換レンズユニット、カメラボディー、超音波モータ駆動装置
【課題】超音波モータおよびそれに結合した機構部品の経時変化が原因で、超音波モータの周波数特性が変動したとしても、長期に渡って安定した駆動を維持することができる撮像装置を提供する。
【解決手段】フォーカスレンズ24を移動させる超音波モータ35を備えた撮像装置であって、超音波モータ35を所定条件で動作させる補正制御部100を備え、補正制御部100は、超音波モータ35を所定の回転速度で動作させる時の印加電圧の周波数特性を測定し、周波数特性を予め設定されている基準周波数特性と比較し、周波数特性と基準周波数特性との差分に基づき周波数特性を補正して補正周波数特性を算出する補正処理を実行可能である。
(もっと読む)
1 - 20 / 57
[ Back to top ]