
Fターム[5H680DD82]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 構成部材の形状 (1,109) | 板状のもの、帯状のもの (271)
Fターム[5H680DD82]に分類される特許
41 - 60 / 271
圧電アクチュエータの製造方法、及び、圧電アクチュエータ

【課題】寸法精度が高い溝を容易に形成する。
【解決手段】振動板40の圧力室24と対向することとなる領域の搬送方向に関する両端部の外側に、走査方向に沿って延在した貫通孔40aを形成する(貫通孔形成工程)。振動板40のいずれか一方の面に貫通孔40aを閉塞するように閉塞層70を接合する(閉塞層形成工程)。振動板40の上面、振動板40の貫通孔40aの内壁、及び、振動板40の貫通孔40aから露出した閉塞層70の上面に跨って、薄膜62を形成する(成膜工程)。薄膜62の表面に、圧電材料を用いて、圧電材料の粒子を堆積させることにより圧電層41を形成する(圧電層形成工程)。閉塞層70を加熱して除去する(除去工程)。
(もっと読む)
アクチュエータおよびそれを用いた位置決め装置

【課題】 簡単な構造で装置の低背化と移動ストロークの拡大が可能なだけでなく、直進性が良く精密な位置決め可能な自走式アクチュエータおよびそれを用いた位置決め装置を提供する。
【解決手段】 一方の電気機械変換素子の変位の振動による移動体61の共振周波数frxと他方の電気機械変換素子の変位の振動による移動体61の共振周波数fryが5%以上異なるように構成する。
(もっと読む)
微小構造物の製造方法、微小構造物集合体、微小構造物、改質器、マイクロプラズマ発生装置、ガス検知用センシングデバイス、アクチュエータ及び圧力センシングデバイス
【課題】所望形状の均質な微小構造体を形成することのできる微小構造物の製造方法等を提供する。
【解決手段】表面に複数の凸部5を有する基材1を、凸部5の先端部によって形成される基材1表面の凸部の向き4が蒸着粒子3の入射方向に対して対向する方向より偏向して基材1を設置して蒸着材料を成長させる。これにより、凸部5の先端部から蒸着材料の構造体を成長させて個々の構造体がギャップによって隔てられ物理的に独立した微小構造物2の集合体を形成する。
(もっと読む)
リニア駆動型超音波モータ
【課題】被駆動部材の移動抵抗及び摩擦抵抗を低減しつつ確実にガイドすることができ、かつ、小型化可能なリニア駆動型超音波モータを提供する。
【解決手段】圧電素子を有する超音波振動子と、超音波振動子との間の摩擦力により相対的に駆動される被駆動部材と、超音波振動子を被駆動体に付勢する押圧部材と、被駆動部材を支持する球状の転動部材と、超音波振動子と押圧部材と転動部材とを収容するケース部材と、転動部材を介して被駆動部材を移動可能に支持するベース部材と、を少なくとも具備するリニア駆動型超音波モータであって、ケース部材における、被駆動部材が駆動される方向に対して垂直な断面形状が略コの字型である。
(もっと読む)
超音波モータ
【課題】低速駆動を行う場合であっても、不感帯の影響を小さくして良好な制御性且つ高い速度分解能で駆動可能な超音波モータを提供すること。
【解決手段】駆動位相差と駆動速度と特性直線上の駆動点を切り替えて駆動速度を制御する制御CPU22を、超音波モータに具備させる。この制御CPU22は、駆動速度を減少させる場合、駆動周波数の値を変化させずに駆動位相差を増加させ、該駆動点で所定時間だけ駆動した後、駆動位相差を変化させずに駆動周波数の値を前記振動子の共振周波数により近付ける値に切り替える制御を、所望の駆動速度に達するまで繰り返し実行し、駆動速度を増加させる場合、駆動周波数の値を変化させずに駆動位相差を減少させ、該駆動点で所定時間だけ駆動した後、駆動位相差を変化させずに駆動周波数の値を前記振動子の共振周波数からより遠ざける値に切り替える制御を、所望の駆動速度に達するまで繰り返し実行する。
(もっと読む)
振動波駆動装置
【課題】振動子の駆動振動を阻害せず、摺動面から励振される不要な振動を効果的に減衰させて、鳴きや異音の発生を抑制することが可能となる振動波駆動装置を提供する。
【解決手段】複数の定在波振動の合成によって楕円運動が形成可能に構成された振動子と、該振動子を支持する支持部材を備え、
前記振動子は少なくとも圧電素子と接触部材とからなり、前記振動子の楕円運動によって、該振動子の接触部材と接触する被駆動体を駆動する振動波駆動装置であって、
該振動波駆動装置には振動抑制部材が備えられており、該振動子に励振される前記複数の定在波振動における節円または節線が含まれるそれぞれの節がお互いに交差し重なり合う共通の節の内、
該振動子の支持部分と異なる節に対して前記振動抑制部材が当接するよう設けられた構造を備えている。
(もっと読む)
超音波モータ
【課題】板状圧電素子及び振動子の製造が容易で、製品の性能ばらつきが小さい超音波モータを提供すること。
【解決手段】縦・捻じり振動方式の超音波モータに次の振動体を具備させる。前記振動体は、板状圧電素子4a21を積層して形成された圧電層部4a2と、積層方向に対して垂直な面と所定の角度θを為す第1の傾斜面を備え、該第1の傾斜面全面で前記圧電層部4a2の一方端面と接する第1の弾性体4a1と、前記第1の傾斜面と平行な第2の傾斜面を備え、該第2の傾斜面全面で前記圧電層部4a2の他端面と接する第2の弾性体4a1’と、を具備し、前記板状圧電素子4a21は、外形面に対して垂直を為す面に電極膜を備え、前記圧電層部4a2には前記板状圧電素子4a21の積層方向に沿って貫通孔Hが設けられ、前記第1の弾性体4a1及び前記第2の弾性体4a1’には前記傾斜面に対して前記角度θを為す面に対して垂直な方向に沿って貫通孔H’が設けられている。
(もっと読む)
圧電振動体、圧電アクチュエータ、電子機器及び圧電振動体の製造方法
【課題】振動特性のばらつきを抑制することができる圧電振動体、圧電アクチュエータ、電子機器及び圧電振動体の製造方法を提供すること。
【解決手段】電極が設けられる圧電素子31,32と、当該圧電素子31,32が積層される補強板33とを有し、前記電極への電圧印加に応じて振動する圧電振動体30であって、圧電素子31,32と補強板33とは、互いに接合材により接合され、当該圧電振動体30は、周縁における当該圧電振動体30の振動時の節の少なくともいずれかに応じた位置に、他の位置より多くの接合材が保持される保持領域34を有する。
(もっと読む)
振動アクチュエータ、レンズ鏡筒、および光学装置
【課題】低速から高速まで安定して動作することが可能な振動アクチュエータと、そのアクチュエータを有するレンズ鏡筒および光学装置を提供すること。
【解決手段】電気機械変換素子104に交流電圧が印加されることにより、振動波が発生する振動部材103と、振動波によって振動部材103に対して相対移動する相対移動部材102と、電気機械変換素子104に前記交流電圧を印加する電圧印加手段22,23,25と、振動部材103と相対移動部材102との相対移動速度に応じて交流電圧の振幅を変化させる制御手段20とを有する振動アクチュエータ。
(もっと読む)
モータ駆動装置、制御方法、及びプログラム
【課題】振動波モータの起動時間の短縮及び被駆動体の滑らかな制御を可能としたモータ駆動装置、制御方法、及びプログラムを提供する。
【解決手段】振動波モータ駆動回路のCPU5は、移動体4を予め定められた速度で駆動するために設定された変更後の2相の交流電圧の位相差が予め定められた位相差の下限値よりも小さくなる場合は、2相の交流電圧の周波数を上げる。また、変更後の2相の交流電圧の位相差が予め定められた位相差の上限値よりも大きくなる場合は、2相の交流電圧の周波数を下げる。位相差を変更することにより、第1の曲げ振動モードの振動の大きさと第2の曲げ振動モードの振動の大きさとの比を変化させて移動体4の移動速度を予め定められた速度とする。
(もっと読む)
超音波モータ
【課題】単一の部材からなり、構造が単純で、溝部等が不要であり、縦振動とねじれ振動を容易に励起することができ、該縦振動と該ねじれ振動を合成することにより楕円振動を形成し、該楕円振動によりロータを回転させる超音波モータを提供することである。
【解決手段】超音波モータ10は、中心軸に垂直な断面が長方形状の長さ比率を有する振動子11と、該振動子11の楕円振動発生面に接して振動子11の該楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータ15と、を少なくとも備える。上記振動子11は圧電素子単体から成り、その分極の方向が中心軸の方向を含む該振動子11の側面の面内方向にほぼ有り、且つ、該中心軸の方向とのなす角度εが、0<ε<π/2を満たす。そして、上記振動子11の回転軸方向に伸縮する縦1次共振振動と該回転軸をねじれ軸とするねじれ3次共振振動を合成して、上記楕円振動を形成する。
(もっと読む)
高電圧出力ドライバー
【課題】効果的な負荷の接続異常検出を行う。
【解決手段】駆動電源電圧は、制御信号に応じて変更される。アンプAP1,AP2は、前記駆動電源電圧にから負荷PZへ供給する駆動電流を出力する。電流検出抵抗R20には、流れる電流に応じた検出電圧を発生する。コンパレータCP51は、検出電圧をしきい値と比較し、その比較結果から検出電圧の上下に応じた周波数信号を出力する。
(もっと読む)
超音波モータ
【課題】単板の圧電振動子を従来とは異なる辺比で構成すると共に、これを積層することにより、小型化、効率化、および構造の簡略化を図る。
【解決手段】矩形で単板の圧電振動子を積層して積層型圧電振動子50を構成し、積層型圧電振動子50が、拡がり振動モードと曲げ振動モードとを組み合わせた多重振動モードで振動することにより駆動力を発生する超音波モータであって、単板の圧電振動子の二組の辺のうち、一方の組の辺の長さをLとし、他方の組の辺の長さをwとし、w/Lを変数として、w/Lと拡がり振動モードの共振周波数とを対応させると共に、w/Lと曲げ振動モードの共振周波数とを対応させた場合、単板の圧電振動子は、拡がり振動の共振周波数と曲げ振動の共振周波数とが実質的に同一となるw/Lの値に基づいて形成されていると共に、単板の圧電振動子は、厚さ方向に複数積層されている。
(もっと読む)
振動体及びその製造方法とそれを備えた超音波モータ
【課題】本発明は、製造が容易で簡単であるだけでなく信頼性のある電極接続部を有する超音波モータの振動体を提供する。
【解決手段】超音波モータの振動体20は、振動部材20aと、電圧を印加したときに進行波を生成し、振動部材を振動させる圧電体21と、を含み、圧電体21は、正極と負極が交互に分極され、振動部材20aに取り付けられた第1圧電層22と、正極と負極が交互に分極され、第1圧電層に取り付けられた第2圧電層23と、第1及び第2圧電層の第1面と第1面の反対面である第2面とに形成された複数の電極を備える電極部40と、第1及び第2圧電層の外周面に形成され、複数の電極を相互に選択的に接続する電極接続部60と、を含むことを特徴とする。
(もっと読む)
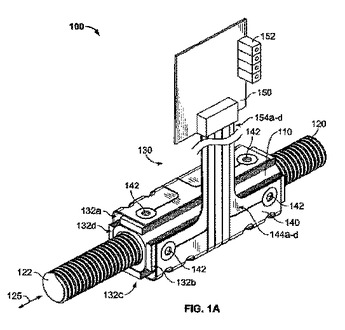
減電圧リニアモータシステムおよびその方法
リニアモータシステムが、螺刻された通路を有する要素と、螺刻されたシャフトと、駆動システムとを含む。螺刻されたシャフトは、螺刻された通路の少なくとも一部を通して延在しかつそれと少なくとも部分的に係合されている、回転軸を有する。駆動システムは、要素に動作可能に接続された少なくとも2つの部材を備える。2つの部材はそれぞれ、2つ以上の圧電層と、圧電層のそれぞれの対向する表面に連結されている電極とを備える。部材は、回転軸に沿った方向に拡張および収縮するように構成されている。駆動システムは、要素に振動を与え、螺刻されたシャフトを、要素を通して、同時に、回転、および回転軸に沿った方向に平行移動させ、かつ回転軸に沿った方向に軸方向力を印加するように構成されている。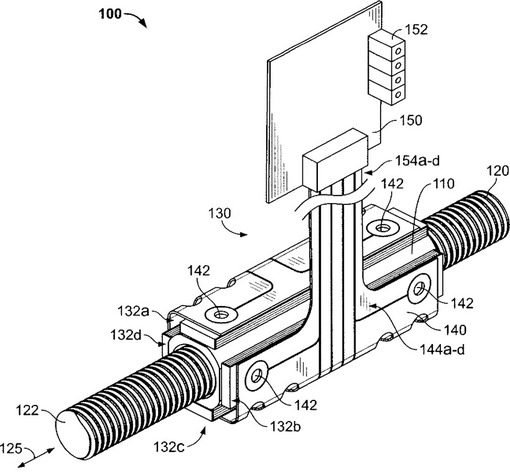
 (もっと読む)
(もっと読む)
多数の圧電アクチュエータを使用するアクチュエータシステム
【課題】摩擦を比較的低レベルとし剛性を比較的高レベルとしつつ光学デバイスの1つまたは複数の光学素子を高精度かつ高信頼性に位置決めするシステムを提供する。
【解決手段】位置決めシステムは、可変ズームレンズシステム等の光学デバイス内の光学素子の位置を調整する。フレームが光学素子を支持し、細長支持構造の細長表面がそのフレームを支持する。フレームは細長支持構造に係合する圧電アクチュエータも支持する。制御部は圧電アクチュエータを駆動する制御信号を供給する。駆動されたアクチュエータモジュールの圧電素子は、細長支持構造の細長表面に第1及び第2の力を組み合わせて作用させ、細長表面に対しフレームを位置決めする。圧電素子により与えられた力の組合せによって、細長支持構造に対し圧電アクチュエータが前進する。
(もっと読む)
超音波モータを用いたステージ及びその組立方法
【課題】ステージをコンパクトに構成できると共に、所望の精度を確保でき、更にスケールの防塵を行うことができるようにする。
【解決手段】ベース部2と、テーブル3と、ベース部2とテーブル3との間に配置される案内部材1a、1bと、テーブル3に摺動板固定部材9と一体的に固定される摺動板8と、超音波モータ10と、テーブル3にスケール固定部材6と一体的に固定されるスケール4と、センサ5とを含むステージにおいて、治具部材21を用いて案内部材1a、1bに予圧を与えた状態で案内部材1a、1bを固定した後に治具部材21を取り外し、治具部材21を取り外した位置に摺動板固定部材9と一体的に固定した摺動板8をテーブル3に固定し、及び又は、治具部材21を取り外した位置にスケール固定部材6と一体的に固定したスケール4をテーブル3に固定する、ように構成する。
(もっと読む)
超音波モータ
【課題】単一の部材からなり、構造が単純であり、溝部等が不要であり、縦振動とねじれ振動を容易に励起することができ、該縦振動と該ねじれ振動を合成することにより楕円振動を形成し、該楕円振動によりロータを回転させる超音波モータを提供することである。
【解決手段】超音波モータ10は、中心軸に垂直な断面が矩形状の長さ比率を有する振動子である圧電素子11と、該圧電素子11の楕円振動発生面に接して振動子の該楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータ16と、を少なくとも備えている。そして、上記圧電素子11の回転軸方向に伸縮する縦1次共振振動と、上記回転軸をねじれ軸とするねじれ2次共振振動とを合成することにより、上記楕円振動を形成する。
(もっと読む)
超音波モータ及び超音波モータの押圧力検出方法
【課題】実際の製品として利用可能な形態で超音波振動子から被駆動部材への押圧力を直接的に高精度で測定することができ、製品に組み込まれた後であっても容易に押圧力を再設定できる超音波モータ及び超音波モータの押圧力検出方法を提供すること。
【解決手段】内部電極23a,23b,25a,25b,27a,27bが設けられた圧電シートが複数枚積層されて構成された圧電振動子3に縦振動と屈曲振動とを同時に発生させて楕円振動を発生させて駆動力を得る超音波モータに、前記圧電振動子3の出力端を被駆動部材7に押し付ける押圧手段5と、前記押圧手段5による押圧力を検出する押圧力検出手段と、を具備させる。前記押圧力検出手段は、前記内部電極23a,23b,25a,25b,27a,27bと、前記内部電極23a,23b,25a,25b,27a,27bにおいて圧電効果によって生じた電気信号に所定のフィルタ処理を施す積分器101と、を有する。
(もっと読む)
超音波モータ及び超音波モータ付き電子機器
【課題】 伸縮振動と屈曲振動を利用して大きな屈曲振動が励振可能で、かつ単相駆動で正逆転切り替え可能とする超音波モータを提供すること。
【解決手段】 第一の振動を励振する分極部と、第二の振動を励振する分極部とを有する第一の圧電素子2aと、第一の振動を励振する分極部と、第二の振動を励振する分極部とを有する第二の圧電素子2bとを有する振動体1と、振動体1と接触する移動体とを備え、第一の圧電素子2aもしくは第二の圧電素子2bの何れかに駆動信号を印加することにより移動体を駆動する超音波モータにおいて、第一の圧電素子2aにより励振される第一の振動と第二の振動の位相関係と、
第二の圧電素子2bにより励振される第一の振動と第二の振動の位相関係とは180度ずれていることを特徴とする。
(もっと読む)
41 - 60 / 271
[ Back to top ]