
Fターム[5H680DD82]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 構成部材の形状 (1,109) | 板状のもの、帯状のもの (271)
Fターム[5H680DD82]に分類される特許
21 - 40 / 271
超音波モータ用振動子摩擦接触部材および超音波モータ用振動子

【課題】振動子先端の摩擦接触部の形状により初期動作が持続して安定な速度、推力、安定な共振周波数が保たれ、安定した動作特性が長期にわたって得られる超音波モータ用振動子を提供する。
【解決手段】被駆動体2を摩擦接触で駆動する超音波モータ用振動子1の摩擦接触部材において、振動子先端の接触子を前記被駆動体との摩擦接触で摩耗する際に軸方向に沿って横断面の外形と横断面積が同一の状態を保つピン形部材で構成したことを特徴とする超音波モータ用振動子摩擦接触部材、およびその超音波モータ用振動子摩擦接触部材を備えた超音波モータ用振動子。
(もっと読む)
超音波モータ

【課題】積層型圧電素子を弾性体に固定するための冶具や装置を用いなくても、積層型圧電素子を弾性体に容易に固定できる超音波モータを提供すること。
【解決手段】溝部14を有する棒状弾性体12と、棒状弾性体12に両端を保持され、変位方向と棒状弾性体12の長手方向との間の角度において鋭角を有した状態で正面12aと裏面12bとに配設され、さらに棒状弾性体12の長手方向において正対して見て互いに反対方向に傾斜して棒状弾性体12に配置される一対の積層型圧電素子18と、棒状弾性体12の先端部に接合されている摩擦子26と、を具備し、一対の積層型圧電素子18にそれぞれ位相の異なる交番電圧を印加することにより、縦振動と捻れ振動とを同時に励起し、摩擦子26に超音波楕円運動を励起させる超音波モータ1であって、超音波モータ1は、積層型圧電素子18を棒状弾性体12に密着固定するために積層型圧電素子18を与圧する与圧機構60を具備する。
(もっと読む)
振動型アクチュエータ
【課題】電極層の種類を減らす。
【解決手段】超音波アクチュエータ2は、圧電体層41,41,…とプラス及びマイナス電極層5,6とを交互に積層させて構成されたアクチュエータ本体4を備えている。プラス電極層5は、第1〜第4プラス分割電極51A〜54Bと、第1及び第3プラス分割電極51A,53Aを接続するプラス対角接続電極55Aとを有する。第2及び第4プラス分割電極52B,54Bは、プラス電極層5の外部で接続されている。マイナス電極層6は、第1〜第4マイナス分割電極61A〜64Bと、第1及び第3マイナス分割電極61A,63Aを接続するマイナス対角接続電極65Aとを有する。第2及び第4マイナス分割電極62B,64Bは、マイナス電極層6の外部で接続されている。
(もっと読む)
共振動作に適合されるスマート材料アクチュエータ
作動アームの移動の程度を示すよう構成されるセンサと、共振条件におけるアクチュエータの安全な動作を許容するよう構成されるコントローラと共に、固定支持部材と、機械的ウェブと、作動アームと、圧電又はスマート材料スタックとを有するスマート材料アクチュエータが開示されている。共振動作を維持する方法、共振動作を回避する方法、及び、共振周波数を調節する方法も開示されている。 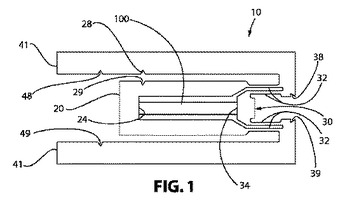 (もっと読む)
(もっと読む)
圧電アクチュエータ、レンズ鏡筒及びカメラ
【課題】圧電体の電極に対する改良された電気配線を有する圧電アクチュエータを提供する。
【解決手段】本発明の圧電アクチュエータ10は、互いに対向する第1の面11Fと第2の面11Rとを有する凹部11が形成されたベース部材10と、前記凹部11内に配置された際に、前記第1の面11Fと前記第2の面11Rのそれぞれに対向する第3の面31Fと第4の面31Rとを有する駆動部材と、前記第3の面31Fと前記第1の面11Fとの間に配置された第1の圧電体33F、及び前記第4の面31Rと前記第2の面11Rとの間に配置された第2の圧電体33Rと、前記ベース部材10の表面に形成され、前記第1の圧電体33Fと前記第2の圧電体33Rとを電気接続する導電材料40と、前記第1の圧電体33F及び前記第2の圧電体33Rへの電力供給を行う電源と前記導電材料40とを接続する電気配線45と、を備えることを特徴とする。
(もっと読む)
振動型アクチュエータ
【課題】振動型アクチュエータ作動時の騒音を抑制する。
【解決手段】超音波アクチュエータ2は、アクチュエータ本体4と、アクチュエータ本体4に設けられて駆動力を出力する駆動子3とを備えている。超音波アクチュエータ2は、アクチュエータ本体4に設けられて主面40a,40bに交差する方向の両側へ突出するホルダ5と、ホルダ5をそれぞれ支持する2つの支持体6,6と、アクチュエータ本体4の主面40a,40bに接触することによってアクチュエータ本体4の変位を制限する接触ゴム66a,66b,66cとをさらに備えている。アクチュエータ本体4は、移動体11側へ付勢されている。支持体6,6には、ホルダ5が嵌ると共にアクチュエータ本体4の付勢方向に延びる長孔64が形成されている。接触ゴム66a,66b,66cは、アクチュエータ本体4の各主面40a,40bにおいて長手方向の異なる位置に少なくとも2つ設けられている。
(もっと読む)
駆動装置
【課題】凝着の発生を抑制しつつ、異音の発生を抑制する
【解決手段】駆動装置1は、振動を発生させるアクチュエータ本体4とアクチュエータ本体4に設けられてアクチュエータ本体4の振動に伴って周回運動することにより駆動力を出力する駆動子3,3とを有する超音波アクチュエータ2と、駆動子3,3が当接していて、超音波アクチュエータ2に対して相対移動する移動体13とを備えている。移動体13における、駆動子3,3と当接する当接面13bは、平滑部13c,13c,…と、平滑部13cよりも凹んだ凹部13d,13d,…とが混在している。
(もっと読む)
圧電アクチュエータ、レンズ鏡筒及びカメラ
【課題】駆動力や駆動効率が向上された圧電アクチュエータを提供する。
【解決手段】本発明の圧電アクチュエータは、第1の方向に変位可能な第1圧電素子21、及び第1の方向と交差する第2の方向に変位可能な第2圧電素子22を有し、複数のグループに分けられた複数の圧電部材20と、前記圧電部材20と接触する接触面12Aを有し、前記圧電部材に対して第1の方向に相対移動する相対移動部材12と、複数のグループのうちの1つのグループの圧電部材20Aが接触面に接触している状態のときに、その圧電部材20Aの第1圧電素子を駆動することにより相対移動部材を第1の方向に相対移動させ、圧電部材20Aの第1圧電素子を駆動する際に、他のグループの圧電部材20Bの第2圧電素子を駆動することにより、他のグループの圧電部材を接触面から離間させた状態とする駆動部30と、を備える。
(もっと読む)
圧電アクチュエータ、レンズ鏡筒およびカメラ
【課題】摩擦や擦れの生じにくい圧電アクチュエータを提供する。
【解決手段】本発明の圧電アクチュエータは、ベース部材(11)と移動部材(12)との間に設けられ、前記ベース部材(11)の第1面(11a)と交差する交差方向に伸縮可能な第1圧電素子(23a)および第2圧電素子(23b)と、前記ベース部材(11)と前記移動部材(12)との間に設けられ、前記交差方向とは異なる方向に伸縮可能な第3圧電素子(24a)および第4圧電素子(24b)と、前記第1圧電素子(23a)、第2圧電素子(23b)、第3圧電素子(24a)および第4圧電素子(24b)の伸縮量が伝達され、前記移動部材(12)に駆動力を伝達する伝達部材(21、22)とを備えることを特徴とする。
(もっと読む)
超音波モータ駆動装置
【課題】被駆動体に搭載物を追加しても、超音波振動子にかかる押圧力を一定に保つことを可能とし、これにより動作が安定した超音波モータ駆動装置(XYステージ)を提供する。
【解決手段】縦振動と屈曲振動を同時に励起して楕円振動を発生させ、楕円振動を駆動力として被駆動体を駆動する、複数の超音波振動子を有する超音波モータ駆動装置であって、被駆動体と対向するように超音波振動子に設けられ、被駆動体と接触し被駆動体を平面内の任意の方向に駆動させる駆動子と、被駆動体と超音波振動子との間に作用する押圧力を検出する押圧力検出部と、押圧力検出部による検出結果に基づき押圧力を所定の押圧力に調整する押圧力調整部と、を具備する。
(もっと読む)
振動型駆動装置
【課題】簡単な構成で、移動体の位置を検出できる振動型駆動装置を提供する。
【解決手段】振動型駆動装置1は、軸状の駆動部材8と、駆動部材8を傾斜させることも軸方向に変位させることもできる電気機械変換素子7と、駆動部材8に摺動可能に係合する移動体9と、駆動部材8を軸方向に非対称に往復変位させて移動体を駆動部材に対して滑り変位させる周期的な摩擦駆動電圧と、駆動部材8を傾斜振動させる周期的な傾斜駆動電圧とを電気機械変換素子7に印加可能な駆動回路3と、駆動部材8の傾斜振動の共振周波数を検出する共振周波数検出手段と、共振周波数に基づいて、移動体の位置を推定する位置推定手段とを有する。
(もっと読む)
アクチュエータおよび光学装置
【課題】簡単な構成で、2次元の位置決めができるアクチュエータを提供する。
【解決手段】アクチュエータ6は、印加された電圧に応じて機械的変位を生じる電気機械変換素子11と、電気機械変換素11子の機械的変位によって軸方向に変位させられるとともに傾斜させられる駆動軸12と、駆動軸12に摩擦係合する移動体13と、電気機械変換素子11に、移動体13が駆動軸12に対して滑り変位しない低い変化率で駆動軸12を所望の角度に傾斜させる直流駆動電圧と、移動体13が駆動軸12に対して滑り変位するように駆動軸12を軸方向に振動させる交流駆動電圧とを重畳して印加する駆動回路とを有する。
(もっと読む)
モータ装置、回転子の駆動方法及び軸部材の駆動方法
【課題】高トルクを発生させることができる、小型のモータ装置、回転子の駆動方法及び軸部材の駆動方法を提供すること。
【解決手段】第1部材と、前記第1部材を取り囲んで設けられる第2部材と、前記第1部材に接続され、前記第2部材の内面の少なくとも一部に対して当接状態及び離間状態とすることが可能に設けられた伝達部材と、前記伝達部材に接続され、前記伝達部材を前記当接状態として前記第1部材及び前記第2部材のうち少なくとも一方に回転力を付与する駆動部とを備える。
(もっと読む)
圧電振動子、その製造方法及び圧電振動子を有する線形アクチュエータ
【課題】小型で製造が容易で、かつ大量生産が可能な圧電振動子を提供する。
【解決手段】圧電素子の積層方向に対して上下及び左右に分離した複数個の震動部を有する圧電体と、各々の圧電素子間の圧電素子面に形成され、圧電素子面を左右方向に複数個に分割し、その一端が圧電素子の外側まで延長される複数個の電極端子及び電極端子が形成された圧電素子と隣り合う圧電素子の面に形成された複数個の電極端子と対応するように形成された複数個のジャンプ端子を有する内部電極パターンと、圧電体の側面に形成され、複数個の震動部のうち相互対角線方向に位置した震動部に同時に電源を印加するよう、各々の震動部及びその対角線方向に位置した震動部に対応する各々の電極端子とこれに対応するジャンプ端子を連結する複数個の側面電極を有する外部電極パターンと、圧電体の一側に形成されて震動部で発生した震動を外部に伝達する動力伝達部材とを含む圧電振動子が提供される。
(もっと読む)
リニア駆動装置
【課題】駆動電力の大きさや圧電素子の特性を変えることなく駆動トルクを高めることができる小型のリニア駆動装置を提供する。
【解決手段】振動部材17の振動により駆動軸21が軸線方向に振動することにより、駆動軸21に摩擦接触した移動体3、5が直線移動するリニア駆動装置において、振動部材17は、通電により伸縮する圧電素子23と、弾性を有する金属板製の振動子19とを有し、振動子19は圧電素子23に板面を重ねて固定してあると共に駆動軸21の基端は振動子19の中央位置で振動子19又は圧電素子23に固定してあり、振動子19の外周部19aに質量を大きくする質量付加部28を設けてある。
(もっと読む)
圧電モーターの製造方法、圧電モーター、液体噴射装置及び時計
【課題】 圧電素子と振動部材との位置関係を高精度に維持しながら効率良く所定の作業を進めることができる圧電モーターの製造方法を提供する。
【解決手段】 圧電アクチュエーター10と、回転軸3と、圧電アクチュエーター10を回転軸3に向かって付勢する付勢手段80とを具備する圧電モーター1の製造方法であって、突起部21の基端となる振動部材20の短手方向の辺と突起部21の境界に圧電素子30の厚さ方向に突出する凸部26を形成するとともに、振動部材20の長手方向の二辺の相対向する位置から面方向に突出している腕部22の基端となる前記長手方向の二辺のそれぞれの境界に前記圧電素子30の厚さ方向に突出する凸部27を形成する工程と、凸部26、27に圧電素子30の端面を当接させて振動部材20に対する圧電素子30の位置を規制することによりその位置合わせを行ないつつ振動部材20に圧電素子30を貼着する工程とを有する。
(もっと読む)
超音波モータ
【課題】複数の超音波振動子を備えた超音波モータであって、前記複数の超音波振動子を同時駆動する際の駆動安定性及び駆動自由度を向上させた超音波モータを提供すること。
【解決手段】超音波モータを次のように構成する。すなわち、複数の圧電素子2と、圧電素子2の一方面に設けられた少なくとも一つ以上の駆動子4と、圧電素子2の他方面において縦振動及び屈曲振動の共通の節または節近傍に対応する位置に配設されたホルダ部材10と、ホルダ部材10と係合することで被接触部材13と駆動子4との接触面に対して平行を為す方向における圧電素子2の位置を規制する位置規制部材6と、位置規制部材6に設けられ、ホルダ部材10と係合することで圧電素子2を保持する振動子保持部材16と、圧電素子2の個数と同数の位置規制部材6が設けられたベース部材8と、駆動子4により任意の方向へ摩擦駆動される被接触部材13と、を具備する超音波モータ。
(もっと読む)
圧電モーター、液体噴射装置及び時計
【課題】コストが高騰することなく、トルクや回転速度などの回転特性を可変可能な圧電モーター、液体噴射装置及び時計を提供する。
【解決手段】圧電体層40と該圧電体層40を挟んで両側にそれぞれ設けられた第1電極50及び第2電極60とを有する圧電素子30と、圧電素子30が固定される振動部材20と、を有する圧電アクチュエーター10と、前記振動部材20の長手方向の一端部に設けられた当接部21が当接されて回転駆動する回転軸3と、前記圧電アクチュエーター10を前記回転軸3に向かって付勢する付勢手段80と、を具備する圧電モーター1であって、前記回転軸3の前記当接部21が当接する領域が、前記圧電素子30と前記振動部材20の積層方向に対して傾斜した傾斜面3aとなっており、前記圧電素子30に駆動信号を印加すると共に、前記駆動信号の電圧をオフセットする制御部を有する。
(もっと読む)
超音波モータ
【課題】駆動位相差制御による速度制御と、周波数追尾と、を両立し、低速度領域においても安定した駆動状態を得ることができる超音波モータを提供すること。
【解決手段】駆動位相差を変化させて駆動速度を制御する超音波モータに、次の速度制御回路111を具備させる。速度制御回路111は、目標速度に対応した駆動位相差の駆動信号を連続的に生成させる第1の動作モードと、互いに異なる複数の駆動位相差の駆動信号を目標速度に対応して周期的に生成させる第2の動作モードと、を目標速度に基づいて切り替える。前記互いに異なる複数の駆動位相差のうち少なくとも一つの駆動位相差は、前記振動検出信号の振幅値を、前記位相差検出部による位相差検出が可能な振幅値とする駆動位相差(第1の駆動位相差)である。周波数制御部は、第2の動作モードで動作している場合には、第1の駆動位相差の駆動信号による駆動期間中に周波数制御する。
(もっと読む)
アクチュエータおよびそれを用いた位置決め装置
【課題】 簡単な構造で装置の低背化と移動ストロークの拡大が可能なだけでなく、移動の真直性とX−Y方向の直交性に優れたアクチュエータおよび当該アクチュエータを用いた位置決め装置を提供する。
【解決手段】 被駆動部材35において、2つの駆動体41,42を、直交する2軸に対して線対称となるように配置することで、各駆動体の移動方向の傾きを相殺し、各駆動体の2つの電気機械変換素子に、互いに同じ電圧または正負が反転した電圧を印加することで、直交する2軸方向に駆動する。
(もっと読む)
21 - 40 / 271
[ Back to top ]