
Fターム[5J062CC12]の内容
Fターム[5J062CC12]に分類される特許
201 - 218 / 218
到着誤差の無線信号時間の検出と補償のためのシステムと方法
【解決手段】到着時刻誤差の影響を低減することができるシステムと方法が開示される。CDMA装置のような子局において、送信されたコードが記憶された基準コードと一致するとき、相関パルスが発生される。マルチパス効果が無い場合、複数の送信器からの基準コードの複数の送信の検出に応答して、補正パルスが発生される。しかしながら、マルチパス効果は発生された補正パルスを歪ませ、到着時刻の誤差をもたらす。この発明は相関パルスの幅を計算し、そのパルス幅に基づいて遅延補正因子を決定する。遅延補正因子は、測定された遅延時間に加算され、より正確な遅延時間を供給し、従って到着時刻に基づいたより正確な位置測定を可能にする。他の実施形態において、遅延補正因子に適用するために、他の信号因子も用いてもよい。実際の位置決定は、子局、またはその他の位置決定エンティティ(PDE)により実行してもよい。システムは、また全地球測位システム(GPS)衛星から受信された到着時刻信号に補正因子を適用することができる。  (もっと読む)
(もっと読む)
少なくとも1つの移動対象物を連続的にリアルタイムで追跡するための方法、並びにそのための送信器と受信器
所定の多次元空間内で少なくとも1つの移動対象物の位置を連続的にリアルタイム追跡するための方法が少なくとも1つの移動送信モジュールを備えており、該移動送信モジュールを分析すべきシステムの少なくとも1つの移動対象物に取り付け、該移動送信モジュールの信号を定置受信器および信号処理ネットワークにより受信し、中央で処理する。送信モジュールから放射される信号は、1つの周波数バンド領域で時分割多重方式に従い送信された電磁波である。使用可能な周波数バンドをただ1つのチャネルとして位置測定精度の最大化のために使用し、送信器(Sp,Sb)と受信器(E1〜En)との間の通信を、非同期擬似ランダムパターンによる擬似ランダム時分割多重の原理に基づいて行うことにより、1つ又は複数の対象物の位置をいつでも、どのような場所でも、数msの時間的分解能と高い位置的分解能を以て連続的に追跡することのできる方法が得られる。さらにそのために使用される送信器および受信器も得られる。  (もっと読む)
(もっと読む)
マルチパス遅延成分を用いた位置測定装置および位置測定方法

【課題】 受信信号を構成するマルチパス遅延波成分を利用して、移動通信システムにおける測位精度を向上する。
【解決手段】 位置測定装置は、複数の信号の各々について当該受信信号を構成するマルチパス遅延波成分を検出するマルチパス遅延検出部と、検出されたマルチパス遅延波の中から所定の基準に適合する複数の遅延波を選択するセレクタと、事前に求めた見通し外パスに関するNLOS遅延関数を格納する格納部と、セレクタにより選択された遅延波と前記格納部から読み出されたNLOS遅延関数とに基づいて移動局の位置を特定する位置計算部とを備える。
(もっと読む)
障害物検出装置、車両

【課題】 自車両に対する障害物の位置関係を特定して運転者等に警報を提示する。
【解決手段】 障害物検出装置は、自車両1の周囲の障害物を検出するために、それぞれが異なる箇所に設置され、携帯端末2から発信された無線電波を受信アンテナ1a,1b,1cで受信し、無線電波間の位相差を電波位相比較回路12で算出し、当該位相比較結果から自車両1に対する携帯端末2の位置関係を計算機13で特定すると、特定された自車両1に対する携帯端末2の位置関係に基づいて、自車両1にとって障害物となる携帯端末2を検出して、警報表示部14で報知する。
(もっと読む)
無線ローカルエリアネットワーク(WLAN)チャネル無線周波数識別(RFID)タグシステムおよび方法
無線ローカルエリアネットワーク(WLAN)無線周波数識別(RFID)タグシステムは、無線ローカルエリアネットワーク(WLAN)内の位置検出にWLANチャネルを使用する。WLANとの干渉を回避するために、スニファ回路を用いて進行中のネットワーク通信がないことを確認するか、またはRFIDタグからの送信がWLANの標準の受信装置に無視されるように符号化シーケンスまたはプリアンブルを変更するか、またはWLANの標準の信号を用いてWLAN内のユニットに該当しないアドレス宛てにメッセージを送信する。WLAN内の複数の位置探知ユニット(LU)と1つのマスタユニット(MU)とを使用してRFIDタグからの送信を受信し、このタグから複数の位置探知ユニットが受信した複数の信号間の差に基づく三角測量によってこのタグの位置を求めることができる。マスタユニットは、これらの複数の位置探知ユニットから信号情報を受信し、タグの位置を計算する。到着時間差(TDOA)、受信信号強度表示(RSSI)、または他の三角測量手法を使用しうる。 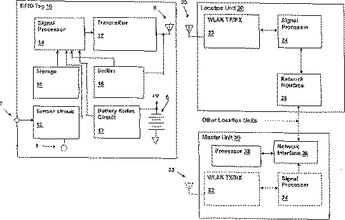 (もっと読む)
(もっと読む)
無線ネットワークシステム
【課題】無線ネットワークシステムの広域展開と情報密度の細密化を両立するため、細粒度の位置基準設置作業を省力化し、広域でも高精度化が可能な測位システムを提供する。
【解決手段】広域で粗粒度の測位手段を有する無線ノード(シンク)と、狭域で細粒度の測位手段を有する無線ノード(ピアノード)と、両者を併有する無線ノード(ハブ)により階層無線ネットワークを構成し、位置基準であるシンクからハブへ、ハブからピアノードへ階層的に位置を推測し、細粒度の測位結果をフィードバックして補正することにより、広域でも細粒度の位置精度で測位を行なうことを可能にする。
(もっと読む)
位置表示端末
【課題】 GPS衛星からの電波を受信できない領域でも当該位置表示端末の自位置を把握することが可能な、位置表示端末を提供する。
【解決手段】 位置表示端末10は、境界装置30から入場情報を受信する情報受信部12と、全地球測位システムを利用して位置表示端末10の自位置を取得する第1位置取得部14と、位置表示端末10の加速度に基づいて、位置表示端末10の移動距離を測定する距離測定部16と、位置表示端末10の主軸線の向く方位と、位置表示端末10の移動距離と、に基づいて、基準位置からの相対的な移動ベクトルを算出する移動算出部18と、移動ベクトルに基づいて位置表示端末10の自位置を取得する第2位置取得部20と、自位置に応じた地図を表示する表示部24と、を備える。
(もっと読む)
GPS電波陰影地域で位置探索器を用いて端末機の位置を測位する方法及びシステム
【課題】本発明は、GPS電波陰影地域でLDパイロット信号を受信する地域を区分する方式により端末機の位置を測位する方法及びシステムを提供するためのものである。
【解決手段】本発明は、GPS電波陰影地域において、端末機、オフセット(Offset)を人為的に生成させて送出する位置探索器(Location Detector)、前記端末機の位置測位を全般的に制御する位置決定サーバ及び位置情報関連データベースを含むLDマッピングサーバを用いてCDMA移動通信網で端末機の位置を測位する方法であって、(a)位置測位要請を受けた前記端末機において、基地局または中継器の基準パイロット信号及び前記位置探索器で発生されるLDパイロット信号を獲得するステップと、(b)前記基準パイロット信号または前記LDパイロット信号の強さが一定大きさ以上に受信された場合、一定大きさ以上の前記基準パイロット信号の情報または前記LDパイロット信号の情報をPSMM(Pilot Strength Measurement Message)を用いて前記位置決定サーバに伝送するステップと、(c)前記位置決定サーバに伝送された前記PSMMからチップ(Chip)単位の擬似雑音コード位相値を計算するステップと、(d)前記(c)ステップで計算された前記擬似雑音コード位相値が位置測位用に割り当てられた位置測位用擬似雑音コードの位相値である場合、前記擬似雑音コード位相値を前記LDマッピングサーバに伝送するステップと、(e)前記LDマッピングサーバに伝送された前記擬似雑音コード位相値を用いて前記端末機の位置情報を獲得するステップと、を含むことを特徴とする。
(もっと読む)
測位システム
本発明は、測位システムをインストールする方法であって、前記測位システムは2以上の基地局(BS1乃至BS4)を有し、前記方法は、前記基地局(BS1乃至BS4)を並置するステップと、前記基地局のクロック間のいずれかの同期の欠如を定量化するステップと、1以上の前記基地局(BS2’乃至BS4’)をそれぞれの固定された動作位置へと再配置し、該再配置された基地局のそれぞれからの信号の飛行時間を測定するステップと、前記飛行時間及び前記定量化された同期の欠如のデータから、前記基地局(BS1、BS2’乃至BS4’)の相対的な間隔、及びそれ故前記インストールされる測位システムの構成を決定するステップと、前記インストールされる測位システムの構成を記録するステップと、を有する方法。を提供する。システムの構成を定義するデータが、個々の基地局によって発信される信号の飛行時間と共に、インストールされた測位システムの近隣におけるモバイル送受信器に中継されることができる。基地局のクロックの同期のいずれかの実時間の欠如を定量化するデータが、該測位システムによって定義される地理的エリア内における送受信器の位置を決定するために該送受信器によって利用される。  (もっと読む)
(もっと読む)
TDOA/GPS混成ワイヤレス位置検出システム
セルラ電話通信システムにおいて、移動ワイヤレス送受信機(MS)について判定する位置の精度およびロバスト性を高める方法およびシステムを提供する。移動ユニット内に埋め込まれている補助GPSデバイス、およびネットワーク状基地局(105)において信号特性データを抽出するインフラストラクチャに基づく設備双方からの位置関連情報を統合する。利用可能な支援付随情報も、付加的に、位置判定において評価し、ロバスト性および精度を高めた位置推定値を得ることができる。  (もっと読む)
(もっと読む)
送信時刻差測定方法およびそのシステム
端末(1304)と基地局(1302)との信号の往復伝搬時間(1601)と、端末(1304)が基地局(1302)から信号を受信して基地局(1302)に信号を送信するまでの折り返し時間(1603)とにより、端末(1304)と基地局(1302)との間の信号の伝搬時間(1605)を算出する。同様にして、端末(1304)と基地局(1303)との間の信号の伝搬時間(1606)を算出する。そして、伝搬時間(1605)と伝搬時間(1606)との差分と、端末(1304)で測定された到着時間差(1607)と比較することにより、基地局(1302)と基地局(1303)との間の送信タイミング差(1608)を算出する。 (もっと読む)
到着時間差(TDOA)測位サービスの方法とシステム
到着の時間差方法を使用して位置を三角測量するために3次元位置座標を使用し、誤差を減少し、誤差を訂正し、移動送信装置と基地局で高度に正確なクロックの必要性なしで全地球測位システムを利用する、移動送信装置の位置を決定する方法とシステム。 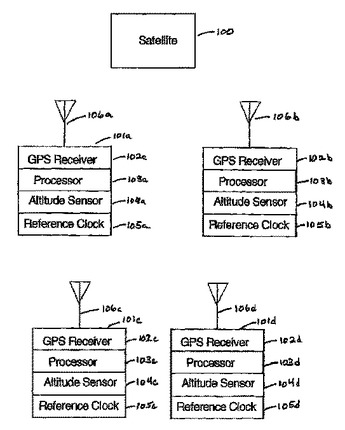 (もっと読む)
(もっと読む)
非同期の受信機クロックを使用して時間同期されたネットワーク性能を達成する位置検出システムおよび方法
監視環境内の物体の位置を検出するシステムは、非同期のクロックを有する受信機にRF信号を送信するタグ送信機を含む。プロセッサは、各受信機と共に動作し、受信機における少なくとも伝搬遅延または処理遅延のうちの一方に基づいてクロックのクロックタイミング関係を決定して、受信機動作を同期する。  (もっと読む)
(もっと読む)
別々のネットワークに分割されたノードにより時間同期されたネットワーク性能を達成する位置検出システムおよび方法
監視環境内の物体の位置を検出するためのシステムは、疎結合ネットワークに配列された受信機を含む。タグ送信機は、疎結合ネットワーク間のネットワークノードおよびブリッジとして働く。プロセッサは、ネットワークごとのクロックタイミング、すなわちすべてのネットワークのシステム時間を定義し、ネットワークごとのクロックタイミングに対するその関係を追跡してすべての受信機を時間同期するよう各ネットワーク内の各受信機と共に動作する。また、プロセッサは、タグ送信機から受信された到着時刻信号の区別を行ってタグ送信機に関連付けられている物体の位置を検出するよう動作する。  (もっと読む)
(もっと読む)
位置情報の決定
物体(102)に関する位置情報を決定するための機器(200)であって、複数の受信エレメント(212、214、216、218)を含む、受信するための手段(210)と、受信エレメント(212、214、216、218)で受信された信号(106)を検出し、受信信号を表す出力信号を生成するための検出手段(230)と、各受信エレメント(210)ごとに、他の任意の受信エレメント(212、214、216、218)で受信される信号から生成される任意の出力信号とは別に、その受信エレメント(210)で受信される信号から生成される出力信号にプロセスを適用し、その結果、その受信エレメントで受信される信号(106)を表すパラメータのそれぞれの値を得るように動作可能な処理手段(260)とを含み、処理手段(260)はさらに、こうして得られたパラメータの値を比較し、その結果、物体に関する位置情報を取得するように動作可能な機器(200)。  (もっと読む)
(もっと読む)
移動端末位置測定システム
無線伝送路がフェージング等によって変動しても、第一パスの検出確率を向上させ、移動無線端末装置のダウンサイジング化とコスト削減とを図ることが可能な無線基地局装置を提供する。 SIR推定部13−1〜13−NはPilot復調部12−1〜12−nの出力からサブキャリア毎に受信SIRを算出する。SIR平均化部14はサブキャリア毎のSIRの平均を計算して信号全体のSIRを算出する。閾値設定部15はその計算されたSIRを基に、パスサーチ動作のための閾値を設定する。第一パス検出部19は閾値設定部15にて設定された閾値を基にパスサーチを行う。到来時間計算部21は第一パス検出部19で検出された第一パスを基に到来時間を算出する。 (もっと読む)
端末位置特定方法及びそのシステム
測定可能な基地局やGPS衛星の数の総計が2局しかない環境においても、高精度に端末の位置を特定する技術を提供する。端末21における基地局22からの信号の受信時刻と、基地局23からの信号の受信時刻との差分から双曲線11を求め、基地局22と端末21との間の往復伝搬時間から円12を求め、双曲線11と円12の交点を算出し、候補点13と候補点14とを求める。端末21はセクタ27に位置しているので、セクタ27の範囲内に存在する候補点13を端末27の位置として特定する。 (もっと読む)
無線周波モーション・トラッキング・システムと方法
無線周波数(RF)モーション・キャプチャ・システムは、静止センサ受信器と、キャプチャ域内で追跡すべき1つ以上の物体上の1個以上の送信器マーカー・タグと、少なくとも1つの静止基準タグ送信器と、受信信号を処理する処理システムとを含む。個々のタグはスペクトル拡散RF信号のバーストを送信する。送信信号は共通の同期コードと、各タグに固有のタグ識別コードを含む。擬似範囲の2重差を計算することにより、時間項がキャンセルされて、センサとタグとの間でクロックを同期する必要性なしに、キャプチャ域を移動するに従って処理システムが各タグの位置を正確に決定可能となる。本システムはRF整合移動に使用可能である。 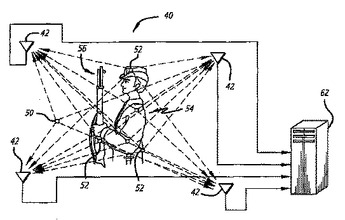 (もっと読む)
(もっと読む)
201 - 218 / 218
[ Back to top ]