
Fターム[5J062CC12]の内容
Fターム[5J062CC12]に分類される特許
81 - 100 / 218
移動局の状態検出システム
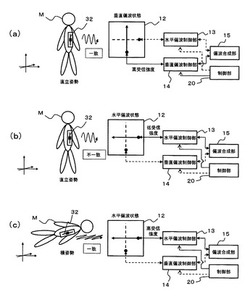
【課題】移動局を設けた設置対象の状態を推定する。
【解決手段】移動局タグTは偏波方向が固定であるタグアンテナ32を備える。固定局リーダRは、互いに交差する2つの偏波面を生成可能な備えたリーダアンテナ12と、電波信号の受信時刻を検出する到来時間検出部19と、リーダアンテナ12の2つの偏波方向における受信信号強度をそれぞれ検出するRSSI部17とを備える。管理サーバSは、到来時間検出部19で検出した受信時刻に基づき移動局タグTから固定局リーダRまでの距離を検出し、かつRSSI部17で検出した2つの偏波方向での受信信号強度に基づき移動局タグTの姿勢を検出し、それら距離及び姿勢検出結果に応じ移動局タグTの状態判定を行う。
(もっと読む)
測位システム及び測位方法

【課題】測位目標が放射する電波を複数の移動体で受信しこれらの間で生成される到来時間差、到来周波数差を用いて目標の位置を特定する測位精度のよい測位システムを得る。
【解決手段】位置が未知な電波放射源1が放射する電波を受信して観測する受信手段を搭載した少なくとも2つの移動プラットフォーム3a,3bと、各移動プラットフォームからの観測情報の受信信号、移動ベクトル情報及び位置情報から受信信号の到来時間差及び到来周波数差を求め電波放射源の位置を標定する信号処理手段35と、各移動プラットフォームからの観測情報の移動ベクトル情報に基づき各移動プラットフォームにおける次の観測における最適移動方向及び最適移動速度を計算し各移動プラットフォームへそれぞれの計算結果を送り、各移動プラットフォームへ同期した移動観測を行わせる最適移動ベクトル計算手段36と、を備える。
(もっと読む)
出口誘導システム
【課題】複数の被誘導者を、少ない負担で円滑かつ迅速に最適な出口へ誘導する。
【解決手段】複数の移動局タグT1〜3と、移動局タグTに対し無線通信により情報送受信を行う固定局リーダR1〜4とを有し、移動局タグTを所持する複数の人物P1〜3に対し出口E1,E2への誘導を行う出口誘導システム1であって、固定局リーダR1〜4で受信した電波信号に基づき移動局タグT1〜3の位置検出を行い、その位置検出結果に基づき各移動局Tから出口E1,E2までの距離を算出し、その算出結果に基づき各移動局Tごとに所定の出口E1,E2を決定して割り当て、その割り当て結果に基づき出口E1,E2それぞれに振り分けられた移動局タグTの数を算出し、その算出結果に基づき各出口E1,E2に振り分けられた移動局タグTの数と当該出口Eで受け入れ可能な人物Pの数とを比較する。
(もっと読む)
移動局測位システム
【課題】基地局数が増加しても演算量が増加したり、あるいは移動局の大型化や高コスト化を伴うことなく精度の高い移動局の測位を行なうことのできる移動局測位システムを提供する。
【解決手段】複数の基地局12が受信する電波に含まれる拡散符号とレプリカ符号との相関値の大きさを予め定められた関係に基づいて算出する相関演算部64と、相関演算部64によって算出された相関値の大きさに基づいて予め記憶された関係から移動局10から各基地局12への無線通信における通信誤差に関する誤差関連値を各基地局12について算出する相関値誤差変換部68と、誤差関連値に基づいて予め記憶された関係により測位における各基地局12の重みを表す重み行列を決定する重み行列生成部72と、複数の基地局12のそれぞれにおける移動局10から送信される電波の受信結果と重み行列とを用いて、移動局10の位置を算出する測位部とを有する。
(もっと読む)
無線測位システム及び無線測位方法
【課題】インフラ側に簡易な送信機能のみを有する基地局を設置し、複雑な送受信機能を有する基準局の数を減らすことで、無線測位システム全体のコストを低減することを課題とする。
【解決手段】複数の基地局A,Bから、互いに非同期で無線信号R1を少なくとも一つの基準局Pと移動端末Mとに送信する。基準局Pが無線信号R1に応答して無線信号R2を移動端末Mに送信する際、無線信号R1を受信した受信時刻と無線信号R2を送信した送信時刻とを無線信号R2に含ませて送信する。移動端末Mが受信した無線信号R1の受信時刻と、移動端末Mが受信した無線信号R2の受信時刻と、移動端末Mが受信した無線信号R2に含まれた受信時刻及び送信時刻とに基づいて、移動端末Mの位置を演算により求める。
(もっと読む)
汎用ポジショニングプロトコル
態様では、汎用ポジショニング方法(GPP)を使用して、異なるアクセスタイプに対して衛星ベースおよび地上ベースのポジショニング方法をサポートする。端末は、GPPによってサポートされている、ポジショニング方法とアクセスタイプとに対する第1の情報を有する第1のGPPメッセージを交換する。端末は、ポジショニング方法とアクセスタイプとに対する第2の情報を有する第2のGPPメッセージを交換する。それぞれのGPPメッセージは、少なくとも1つのポジションエレメントを含んでいてもよく、それぞれのポジションエレメントは、特定のポジショニング方法に対するものであってもよい。端末は、第2の情報に基づいて、端末自体に対するポジション推定値を取得する。別の態様では、ポジショニングは、異なるワイヤレスアクセスタイプのセルに対する測定値に基づいて実行されてもよい。 (もっと読む)
移動局測位システム
【課題】3次元空間を移動する移動局の位置の算出を4つ未満の基地局により実行可能な移動局測位システムを提供する。
【解決手段】前記移動局の床面からの高さhについての情報である高さ情報を検出する高さ検出部と、受信時刻検出部により検出された各基地局12における電波の受信時刻に関する情報である受信時刻情報と、前記高さ検出部によって検出された前記移動局10の高さ情報と、前記各基地局12の位置についての情報である位置情報とに基づいて前記移動局10の位置の算出を行なう測位部50とを有する。
(もっと読む)
距離測定方法、距離測定用受信局装置及び位置測定システム
【課題】屋内のマルチパス環境下においても、高分解能の遅延時間測定を可能とする。
【解決手段】サブキャリアの周波数が同期したマルチキャリア信号を受信局Rで受信し、サブキャリア毎に、コンスタレーションデータ18の位相及び振幅データである周波数領域コンスタレーションデータ26を得、送信局Tからの受信信号を、その伝播パスに応じて、それぞれ振幅Ai、遅延時間Τi、位相Θiが異なる複数の遅延信号の合成遅延信号として表した時、周波数領域コンスタレーションデータ26と、前記遅延信号との残差が少なくなる遅延時間Τiから送信局Tと受信局Rの相対的な距離を求める。
(もっと読む)
無線システム及びその位置特定方法
【課題】少ない基準点でターゲットの位置を特定できる無線システム等を得る。
【解決手段】位置座標が既知の無線端末A1〜A3と、位置座標が未知の無線端末N1と、各無線端末と無線通信して情報を収集するサーバSを設けた無線システムで、無線端末10A、10Bは、無線端末間の距離を測定する距離測定手段11A、11Bと、距離情報を無線通信によってサーバ20へ送信する距離情報送信手段12A、12Bとを有し、サーバ20は、距離情報を収集する距離情報収集手段21と、距離情報、既知の無線端末の座標、及び設定した未知の無線端末の初期座標値から、非線形連立方程式を常微分方程式の初期値問題に帰着させるパラメータの埋め込みによる方法を用いて、未知の無線端末の座標を計算する行列式計算手段22と、未知の無線端末の座標が、既知の無線端末の配置範囲を元に予め決めた境界条件を超えるか否かを判断する境界条件評価手段23とを有する。
(もっと読む)
位置検出システム
【課題】
マルチホップ無線通信を利用した位置検出システムにおいて、基地局が少数であっても無線端末の位置を高精度に検出する。また、位置検出システム構築時に必要な調整作業を容易にする。
【解決手段】
無線通信管理システム1は、管理装置2と複数の基地局3と無線端末4とから構成される。基地局3は管理装置2から送信される制御情報により、自身の設置高さを柱5などに沿って変更できる機能を有する。無線端末4と基地局3は互いにデータ通信を行い、管理装置に電波強度情報を送信する。管理装置は、各基地局3の設置高さなどを変更しながら、無線端末4と基地局3との間の電波強度情報を収集し、無線端末4の位置を推定する。
(もっと読む)
無線システム
【課題】送信アンテナおよび受信アンテナの間で確実に電波を送受信することができる無線システムを提供する。
【解決手段】無線システム11は、送信アンテナ16と、送信アンテナ16から発信される電波を受信する受信アンテナ17とを備える。送信アンテナ16および受信アンテナ17の間には直接波の直線経路31および反射波の反射経路32が規定される。直線経路31および反射経路32のうちのいずれか一方に電波を遮断する電波吸収体22が配置される。こうした無線システム11では、例えば電波吸収体22が直線経路に配置されると、電波吸収体22は直接波を遮断する。その結果、受信アンテナ17には反射波が到達する。こうして送信アンテナ16および受信アンテナ17の間で確実に電波が送受信される。
(もっと読む)
未知送信局の測位装置及び測位方法
【課題】衛星の軌道誤差の影響による測位精度の劣化を軽減できる未知送信局の測位装置を得る。
【解決手段】2機の人工衛星を介し、未知送信局2と既知リファレンス局1から送信される同一電波信号を受信する電波信号受信部11と、受信電波信号の相関演算を行うことにより、未知送信局2及び既知リファレンス局1からの受信電波信号の到来時間差及びドップラー周波数差を計算するTDOA/FDOA計算部12と、到来時間差、ドップラー周波数差、地球の形状に基づき、未知送信局2の位置を測位する未知送信局測位計算部13と、電波信号受信部11〜未知送信局測位計算部13の一連の測位の処理を繰り返すか否かの決定を行う処理繰返決定部14と、測位の処理を繰り返す場合は、測位結果に距離が最も近いリファレンス局を選択する最短距離リファレンス局選択部16とを設け、選択されたリファレンス局について、上記一連の測位の処理が行われる。
(もっと読む)
移動デバイスを位置特定するための方法、および移動デバイスを位置特定するための装置
本発明は、移動通信の分野に関する。本発明は、ダウンリンク・プリアンブル高速検出DPFDによるWiMAX位置特定のための方法および装置を提供する。この方法は、移動ユーザ局MSSが、TDDモードで移動WiMAXによってすべて同期されているBSからのダウンリンク・プリアンブルを検出するステップと、異なるBSのプリアンブルのTDoAが、プリアンブル・ベースの同期検出によって獲得されるステップと、正確なロケーションが、従来のTDoAアルゴリズムを介して計算されるステップとを備える。本発明の実施形態は、アップリンク・レンジング・アシスタント・ダウンリンク・プリアンブル検出によって移動ユーザ機器の位置を測定することに関する新たな概念を説明する。移動WiMAXが、ITUによって3G標準として受け入れられ、広く定着するにつれ、WiMAXに基づく位置特定は、市場潜在力を有するサービスとなるであろう。 (もっと読む)
基地局、移動局、測距システム、および測位システム
【課題】測位における符号長の大きさを、受信時刻の検出において必要とされる精度が得られ、かつ、受信時刻の検出に要する時間を短縮するように決定することができる基地局、移動局、測距システム、および測位システムを提供する
【解決手段】移動局から送信され、受信部26により受信された電波をサンプリング部27によりサンプリングすることによって得られる符号に含まれる拡散符号と予め記憶された該拡散符号のレプリカ符号との相関値が相関値演算部28により算出され、同期時刻検出部30により前記相関値に基づいて受信した電波に含まれる拡散符号の同期時刻が検出され、符号長決定部32により、同期時刻検出部30における同期時刻検出の際に算出される相関値のピーク値と同期時刻検出部30に予め設定された要求精度の値とに基づいて前記移動局が送信する拡散符号の符号長の大きさが決定される。
(もっと読む)
位置特定装置及び位置特定システム
【課題】車両などの移動体の位置を精度よく特定することができる位置特定装置及び位置特定システムを提供する。
【解決手段】時刻ずれ算出部51は、各通信部20、30、40が送信した時刻補正用信号を基準の通信部10で受信した受信時刻及び受信した時刻補正用信号に含まれる送信時刻に基づいて、基準の通信部10と各通信部20、30、40との時刻ずれを算出する。時刻補正部52は、基準の通信部10と、他の通信部20、30、40との時刻ずれを0にすべく時刻補正を行う。到達時間差算出部53は、車載機が送信した測位用信号を各通信部10〜40で受信した場合、各通信部10〜40での測位用信号の到達時間差として算出する。位置特定部54は、到達時間差に基づいて車載機の位置を特定する。
(もっと読む)
信号源位置推定装置
【課題】所要数の到来時刻差を得ることができない場合であっても、信号源の位置を推定することができる信号源位置推定装置を提供する。
【解決手段】信号源から放射された電波を受信するセンサ1a〜1dと、センサ1a〜1dが電波を受信した到来時刻を個別に算出する到来時刻算出部2a〜2dと、複数の到来時刻を2つずつ組み合わせて、複数の到来時刻差を算出する到来時刻差算出部4と、センサ1a〜1dの各々についての位置を計測するセンサ位置計測部5と、複数の到来時刻差とセンサ1a〜1dの各々についての位置とに基づいて、信号源の位置を推定する位置推定部6と、信号源の位置を推定するための所要数の到来時刻差を得ることができない場合に適用される諸元を補完する信号源高度設定部7とを備えたものである。
(もっと読む)
無線ロケーション・システムにおいてTDOAおよびFDOAを推定するための方法の改良
【課題】位置検出対象信号の存在を試験する周波数および時間期間を限定するために、到着時間差および/または到着周波数差を判定する方法に関する。
【解決手段】移動送信機の位置を検出する際に用いる方法は、相互相関値の集合を求めることを含み、各相互相関値には、対応するTDOAおよび/またはFDOA推定値が関連付けられており、基準信号を協同信号と相関付けることによって求める(図5)。基準信号は、移動送信機が送信し第1アンテナにおいて受信した信号のコピーから成り、協同信号は、第2アンテナにおいて受信した同じ信号のコピーから成る。本方法は、更に、TDOAおよび/またはFDOA推定値の最尤範囲を決定し、次いでTDOAおよび/またはFDOA推定値の最尤範囲に対応する相互相関値の部分集合(図10)内において最適な相互相関値を特定することを含む。次に、最適な相互相関値に対応するTDOAおよび/またはFDOA値を用いて、移動送信機の位置を算出する。
(もっと読む)
測位システムおよび測位方法
【課題】限られた領域内で移動端末に対する測位パルスの送信制御を正確に実行すること。
【解決手段】測位システム50は、計算サーバ400がリーダライタ60を制御して電波を移動端末100に送信し、パッシブ型のRFタグを保持する移動端末100が送信パルスを基地局200,300に送信し、基地局200,300が移動端末の受信時刻を測定する。そして、基地局200,300が測定した受信時刻の差から計算サーバが位置情報を生成し、リーダライタ60を制御して、位置情報によって、移動端末100の移動方向情報を更新し、移動端末100は、移動方向情報に基づいて測位パルスを送信するか否かを判定する。
(もっと読む)
無線測位システム、無線測位装置および無線測位方法
【課題】無線測位システム100内の基地局103a〜103d間の時刻合わせに使われる時間基準信号の無駄な送信を減らす。
【解決手段】基地局103a〜103dは、移動端末101が送信した測位パルスを受信すると、受信通知を計算サーバ104に送信する。計算サーバ104は、いずれかの基地局103a〜103dから受信通知を受けたことを契機として、時間基準局102に時間基準パルスの送信開始を命令する。時間基準局102は、その命令があるまでは時間基準パルスの送信をしない。
(もっと読む)
RFIDタグの空間−時間内の推定位置を決定するための方法、コンピュータ・プログラム及びデータ処理システム
【課題】不完全なデータを使用してRFIDタグの空間−時間内の位置を推定する。
【解決手段】一の時間範囲にわたって、RFIDタグからの信号が複数の受信機で受信される。前記信号は、前記時間範囲内の任意の特定時間に、3つ未満の受信機で受信される。前記信号は、前記時間範囲内の特定時間に生成される。前記時間範囲内の所与の時間における所与の受信機での前記信号の受信は、一のイベントを構成する。このようにして、前記時間範囲内に、複数のイベントが発生する。また、前記複数の受信機の対応する位置は、既知である。データ処理システムにおいて、前記複数のイベントを受信する。前記データ処理システム上でアルゴリズムを実行して、前記複数のイベントを処理する。次に、前記アルゴリズムにより、前記複数のイベントに基づき、前記RFIDタグの空間−時間内の位置を推定する。
(もっと読む)
81 - 100 / 218
[ Back to top ]