
Fターム[5J062CC12]の内容
Fターム[5J062CC12]に分類される特許
61 - 80 / 218
基地局選択方法、移動局測位システム、移動局および基地局

【課題】移動局との電波の送受信が良好に行なわれる基地局を選択するための基地局選択方法、移動局の位置を算出する移動局測位システム、移動局、および基地局を提供する。
【解決手段】受信強度検出部52により、移動局10と複数の基地局12とのいずれか一方により送信される所定のパターンにより位相が変化させられる電波が他方により受信され、受信強度の最大値と最小値とが基地局12ごとに検出され、選択部64により、受信強度検出部52によって複数の基地局12ごとに検出される受信強度の最大値と最小値とに基づいて、移動局10との電波の送受信が良好に行なわれる基地局が選択されるので、所定のパターンにより位相が変化させられる電波の受信強度の最大値と最小値とに基づいて、マルチパスによる干渉等の影響が小さく、移動局10との電波の送受信が良好に行なわれる基地局12を選択することができる。
(もっと読む)
照明システム及び方法
本発明は照明システムにおける測位のためのシステム及び方法に関連する。到着時間差(TDOA)、到来角(AOA)、受信信号強度インデックス(RSSI)並びに統合されたTDOA及びRSSIによる位置推定アルゴリズムの内の少なくとも2つを利用して、測位情報を取得する。本方法は、少なくとも2つの基準ノードを用いて照明ユニット各々に対する偏微分マトリクスを導入した最尤推定法により、高精度化を達成する。  (もっと読む)
(もっと読む)
ワイヤレス通信ネットワークにおける測位のための到着時間(TOA)推定
ワイヤレス通信ネットワークにおいて信号の到着時間(TOA)を決定するための技法について説明する。各セルは、(i)システム帯域幅の中央部分の連続するサブキャリアのセット上の同期信号と、(ii)システム帯域幅上に分散した連続しないサブキャリアの様々なセット上の基準信号とを送信することができる。UEは、サブキャリアの様々なセット上で送信された複数の信号に基づいて、セルに関するTOAを判断することができる。UEは、様々な時間オフセットに関する第1の相関結果を取得するために、セルからの第1の信号(たとえば、同期信号)に関する相関を実行することができる。UEは、様々な時間オフセットに関する第2の相関結果を取得するために、セルからの第2の信号(たとえば、基準信号)に関する相関を実行することができる。UEは、第1の相関結果と第2の相関結果とを合成することができ、合成された相関結果に基づいてセルに関するTOAを判断することができる。  (もっと読む)
(もっと読む)
無線通信システム、無線端末装置、および無線基地局装置

【課題】 MIMOアンテナを備えた無線端末装置が受信する、無線基地局装置からの電波の到来方向を検出することができる無線通信システム、無線端末装置、無線基地局装置を提供することを目的とする。
【解決手段】 無線端末装置SSおよび無線基地局装置BSがMIMOアンテナを備え、このMIMOアンテナから受信する電波の遅延時間差を用いて無線端末装置SSと無線基地局装置BSとの間の距離である第1の基地局端末間距離および第2の基地局端末間距離を算出し、無線基地局装置BSを基準とした無線端末装置SSの位置を無線端末装置へ通知することで、無線端末装置SSが受信する無線基地局装置BSからの電波の到来方向を無線端末装置SSへ表示する。
(もっと読む)
ノード処理遅延のネットワークセントリックな決定
移動局の現在位置を決定するためにワイヤレスアクセスポイント内の遅延を較正する装置および方法を対象とする。ある方法は、傍受デバイスにおいて初期パケットを受信することと、傍受デバイスにおいて、別のエンティティによって送られる、応答パケットを受信することと、パケット到達時間に基づいて時間差を算出することと、現在位置決定エンティティに対して時間差を提供することと、を含む。別の方法は、情報を送るために適切な傍受デバイスに対してリクエストを提供することと、各適切な傍受デバイスから、ワイヤレスアクセスポイントによって送信されるパケットの到達時間と移動局によって送信されるパケットの到達時間との差を表す時間差を受信することと、時間差に基づいて処理遅延推定値を決定することと、処理遅延推定値と受信される時間差とに基づいて移動局の現在位置を決定することと、を含む。  (もっと読む)
(もっと読む)
位置検出のための無線アクセス技術多様性の使用
1つ以上の無線アクセス技術からの測定値を用いてマルチモード移動体デバイスについて位置推定値を決定し、組み合わせた位置検出解を提供する種々の態様を開示する。ワイヤレス通信システムの多重無線アクセス技術能力を用いて、第1無線変調技法、無線ネットワーク・トポロジ、およびチャネル帯域幅によって特徴付けられる第1無線ネットワークにおいて、移動体通信デバイスの位置を検出することができる。次いで、この移動体通信デバイスを第2無線ネットワークに移すことができ、第2無線変調技法、無線ネットワーク・トポロジ、およびチャネル帯域幅によって特徴付けられる第2無線ネットワークにおいて、その位置を検出することができる。次いで、2つの位置推定値を用いて、組み合わせ位置推定値を求めることができる。 (もっと読む)
移動局測位システム
【課題】基地局の時計に時間ずれやクロック速度の差が存在し、機器に固有の送信遅延時間および受信遅延時間が存在する場合においても、移動局の位置の算出を精度よく実行できる移動局測位システムを提供する。
【解決手段】各普通基地局12と基準基地局11とのクロック速度比と、各普通基地局12の時計と基準基地局11の時計との時計ずれと、基準基地局11における送信遅延時間および受信遅延時間とに基づいて測位信号の受信時刻を基準基地局11の有する時計に基づいた時刻に補正する受信時刻補正部(66、68、70)と、補正された受信時刻と、基準基地局11における測位信号の受信時刻と、普通基地局12および基準基地局11の位置情報とに基づいて移動局の位置を算出する測位部72とを含み、移動局10および基準基地局11は、移動局10による測位信号の送信と基準基地局による時計合わせ信号の送信との一方に応答して他方を実行する。
(もっと読む)
測位装置および測位方法
【課題】ノイズの影響を受けにくく、高い信頼性を有する測位装置を提供する。
【解決手段】測位装置は、パルス内で周波数成分が変化するTSP(Time Stretched Pulse)信号を発信する発信部10と、発信部10から所定の距離間隔を隔て、互いに離隔して配置されたTSP信号を受信する複数の受信部21、22、23と、各受信部21、22、23の位置情報を格納している記憶部30と、各受信部が受信したTSP信号の周波数成分の変化パターンに基づいて各受信部がTSP信号を受信した時間差を演算し、時間差と記憶部30から取得した位置情報とに基づいて発信部10の位置を演算する演算部40と、を備える構成とする。
(もっと読む)
測位システム
【課題】マルチパスが測位に与える影響を正確に算出し、その影響を極力除外することで測位精度を確実に向上する。
【解決手段】電波信号を、マルチパス対応の所定の態様で送信する移動局10と、受信された電波信号に対して同期検出を行い受信時刻を算出する到来時刻検出部42、及び、受信された電波信号の強度を検出するRSSI部47を備えた複数の基地局12A〜12Dと、受信時刻に基づいて移動局10の測位処理を行う測位サーバ14とを有し、測位サーバ14は、RSSI部47で検出された電波信号の強度より、到来時刻検出部42で算出される受信時刻に対するマルチパスの影響を表す、マルチパス強度因子を算出し、基地局12で算出されマルチパス強度因子に応じた所定の処理が行われた受信時刻に基づいて、測位処理を行う。
(もっと読む)
測位装置
【課題】移動する電波源に対しても高精度の測位を可能にする測位装置を提供する。
【解決手段】2機以上の衛星3,4を経由して複数の受信局5,6で受信される未知の電波源1,2からの信号間のTDOAとFDOAを用いて前記電波源の位置を推定する測位装置であって、測位装置の信号・情報処理装置7が、TDOAとFDOAを複数回計測するとともに、電波源が等速直線運動するものと仮定し、電波源の初期位置と速度を未知変数とする、前記TDOAとFDOAに関する方程式を前記TDOAとFDOAの複数回の計測結果に従って解き、前記電波源の初期位置と速度を算出する。
(もっと読む)
測位システム
【課題】新たな無線機を別途設けることなく電波伝搬環境に対応した補正を行い、測位精度を向上する。
【解決手段】社員P1〜4に関連づけられ移動局10A〜Dと、複数の基地局12A〜Dと、移動局10の測位処理を行う測位サーバ14とを有する。測位サーバ14は、測位処理による移動局10A〜Dの位置データの時間的蓄積に応じて、測位処理結果を補正するための補正値を算出し、その補正値の算出後、当該補正値に基づき、新たに測位された移動局10A〜Dの位置データの補正を行う。
(もっと読む)
静電気放電発生箇所の検出方法及び検出装置
【課題】任意の被測定領域で発生した静電気放電の発生箇所と発生時刻を効率的に精度良く特定することのできる手段を提供する。
【解決手段】被測定領域周辺の任意の場所に、照射角度を調整可能な可視レーザー距離計を設置し、その距離計の測定基準点を検出基準点とし、距離計のレーザー光と距離情報を元に、検出基準点に対する角度と距離を高精度に定めた4カ所以上の場所に受信アンテナを配置する。そして、被測定領域内で発生した、静電気放電に伴う電磁波が各アンテナに到達した時間差を解析し、異なる平面上に設置した受信アンテナ間で得られた3つ以上の双曲線の交点を求め、検出基準点に対する静電気放電の発生箇所の位置情報を算出する。そして、検出基準点に設置した可視レーザー距離計の照射角度や、レーザー光反射板までの距離を調整して、レーザー光を、算出された静電気放電の発生箇所に到達させることで、静電気放電の発生箇所を特定する。
(もっと読む)
混成GNSSおよびTDOAワイヤレス位置検出システム
汎地球測位システム(GPS)受信機および地上系アップリンク到達時間差(UTDOA)受信機を用いた位置判定方法および装置を提供する。本方法は、比較可能な相互相関係数および到達時間差をUTDOA基準局に関して計算することによって、ダウンリンク衛星測定値を透過UTDOA測定値に変換することを含む。本方法は、重み付け動作を含み、これによって、UTDOA測定値およびGPS測定値の相対的重みを、理論的スケーリング、およびそれに続く経験的調節に基づいて調節する。更に、本方法は、候補の位置検出解とUTDOAおよびGPS測定値との間における加重誤差を最小にするために用いられる距離の効率的な計算および組み合わせを含む。これは、最適な位置検出解に近づくに連れて検索動作の複雑さを増していくことによって、UTDOAについては二次元で、GPS測定値については三次元で効率的に行われる。 (もっと読む)
受信装置
【課題】未知局102からの電波を複数の受信装置100で受信し、その受信時間の差から未知局102の測位を行う際、各受信装置100内部の遅延時間を合わせる必要がある。
【解決手段】電波検出用の受信機に加え、第2の受信機であるGPS受信機を設ける。GPS衛星から時刻信号を受信し、これを測位のためのデータに関連づける。未知局102からの電波は受信され、増幅器とA/D変換器を経てデジタル信号処理回路へ入力される。この回路でFFTを施し、信号を周波数成分へ展開する。注目周波数の振幅をもとに増幅器の増幅率を制御する。ローパスフィルタはデジタル信号処理回路内に設ける。
(もっと読む)
受信装置、無線通信システム、位置推定方法、及びプログラム
【課題】無線信号を用いた位置の推定の精度を向上させること。
【解決手段】周波数の異なる副搬送波が多重化された無線信号をそれぞれ受信する複数の受信アンテナと、前記複数の受信アンテナにより受信された各無線信号について、当該無線信号に含まれる前記副搬送波ごとに基準信号との間の位相差を計算する位相計算部と、前記位相計算部により計算された前記位相差に基づいて、前記無線信号が送信された送信アンテナから前記複数の受信アンテナのうち任意の2つの受信アンテナまでの距離の差である行路差を計算する行路差計算部と、を備える受信装置を提供する。
(もっと読む)
宇宙船の位置を推定するシステムおよび方法
宇宙船(6)の位置を推定するためのシステムが開示される。このシステムは、宇宙船(6)から送信された信号を受信するための受信局(4)および受信局(4)からのデータを受信するための処理局(2)を含む。各受信局(4)は、宇宙船(6)から送信される信号を記録ウィンドウ(8)の期間中に記録して、記録ウィンドウ(8)の期間中に記録された信号を表すデータを処理局(2)へ送信する。受信局(4)のそれぞれに関連した記録ウィンドウ(8)は、互いにオフセットされ、かつ/または別々のサイズである。処理局(2)は、宇宙船(6)と複数の受信局のそれぞれとの距離間の差を推定して宇宙船(6)の位置を推定するために、記録された信号の相関をとる。方法、受信局(4)、処理局(2)およびコンピュータプログラムも開示される。 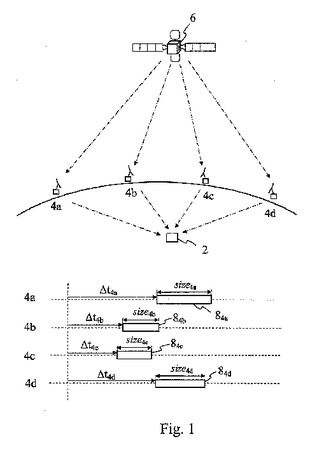 (もっと読む)
(もっと読む)
可動物体の距離及び/又は方位を決定する装置及び方法
本発明は、可動物体の距離及び/又は方位を決定する装置及び方法に関し、該装置及び方法は、可動物体に取り付けられると共に規定周波数を有する少なくとも1つのトランスミッタとレシーバを含む。前記トランスミッタは既知の偏波面を有するアンテナを有し、前記レシーバは左円偏波アンテナ及び右円偏波アンテナを有し、前記レシーバは分析装置を備える又は分析装置に接続され、前記分析装置は規定周波数を考慮して、受信した2つの信号から2つの測定位相値を決定し、前記2つの信号により距離及び/又は方位を計算できる。逆の動作を行うデバイスでは、トランスミッタが2つの円偏波アンテナを有し、レシーバが既知の偏波面を有するアンテナを含む。 (もっと読む)
目標追尾装置
【課題】アンセンテッドカルマンフィルタの推定精度を、観測条件によらずに安定化させることのできる目標追尾装置を得る。
【解決手段】追尾フィルタにおける運動モデルと観測モデルが非線形関数で表される場合に、非線形関数をアンセンテッド変換により近似するアンセンテッドカルマンフィルタを適用した追尾フィルタ2を備え、追尾フィルタ2は、受信信号に基づいて算出された目標の測位結果を逐次読み込み、測位結果からアンセンテッドカルマンフィルタを適用して算出した予測値と測位結果とに基づいて、測位結果に対する予測値の適合度を逐次算出する予測値適合度評価部22と、予測値適合度評価部22で逐次算出された適合度に基づいて、アンセンテッドカルマンフィルタにおけるアンセンテッド変換のスケーリングパラメータを逐次更新するパラメータ設定部24とを備える。
(もっと読む)
航空機位置測定システム、信号種類判定方法およびセンタ局ならびにプログラム
【課題】航空機位置測定システムにおいて航空機が送信する信号の種類を自律的に判定する。
【解決手段】信号の送信パターンの情報を記憶する送信パターン記憶部7と、信号を全て同種類の信号とみなして受信した後、送信パターン記憶部7に記憶されている送信パターンの情報に基づき、信号の種類を判定する信号種類判定部6とを備える。
(もっと読む)
落雷電柱検索システム、落雷電柱検索方法および落雷電柱検索プログラム
【課題】 落雷によって影響を受けたおそれがある電柱をより適正に特定する。
【解決手段】 停電が発生した場合に、その停電日時と配電線の停電領域を特定する配電自動化システム2と、落雷が発生した場合に、その落雷日時と落雷位置を標定する落雷位置標定システム3と、配電線の電柱の位置情報を記憶した電柱データベース43と、配電自動化システム2によって特定された停電領域内で、かつ、落雷位置標定システム3によって標定された落雷位置SPから所定の範囲SR内に位置する電柱を、電柱データベース43から検索する検索タスク46と、を備える。
(もっと読む)
61 - 80 / 218
[ Back to top ]