
Fターム[5J062CC12]の内容
Fターム[5J062CC12]に分類される特許
121 - 140 / 218
測位システム
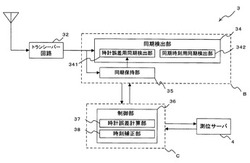
【課題】最小限のハードウェア構成で、精密な測位を行うことができ、さらに、省電力で測位を行うことができる測位システムを提案することにある。
【解決手段】測位を行う前に、所定の時刻情報を拡散処理する拡散処理手段と、拡散符号を所定の時刻に送信するように、拡散処理された時刻情報と共に拡散符号を信号として送信する送信手段を有する移動局と、移動局から受信した信号に基づいて移動局の時刻情報を抽出する時刻情報抽出手段と、移動局の時刻情報と基地局の時刻情報とを用いて移動局の時計誤差を計算する計算手段とを有する基地局とを含み、時計誤差により基地局の時刻情報を補正した時刻情報に基づき、移動局の測位を行う測位システムを提供する。
(もっと読む)
スペクトラム拡散による測位システム

【課題】最小限のハードウェア構成で、精密な測位のための同期時刻検出を行うことができ、さらに、省電力で同期時刻検出を行うことができる測位システムを提案することにある。
【解決手段】移動局から所定の周期で拡散符号を送信し、基地局が受信した信号から粗同期による同期を第1検出として検出する第1検出手段と、第1検出の後に、第1検出の結果に基づき決定された同期検出範囲において受信した信号をサンプリングし、微同期による同期を第2検出として検出する第2検出手段とを含む測位システムを提供する。
(もっと読む)
事業所内空間座標位置判定システム(SiteCubicPositioningSystem(SCPS))
【課題】個々の物品の探索や名称の確認、棚卸の実行に多大の人員と時間と費用を要しない物品管理方法を提供する。
【解決手段】RFID(Radio Frequency Identification)ICタグに、任意の物品の移動履歴情報を持たせる。移動履歴の情報とは緯度、経度、高度、時間である。RFID(Radio Frequency Identification)は誘導電磁界あるいは電波によって、非接触で半導体メモリのデータを読出し、書き込むために近距離通信を行う。このICタグは回収後再利用が可能であるが、部品に組み込んだままとすることで装置に組み込まれた部品の保守管理にも使用出来る。
(もっと読む)
地上局ベースのセルラネットワークを用いた移動局位置特定を促進する方法
セルラ通信に通常使用される無線周波数スペクトルを用いた通信によって移動局(22)の位置特定を促進する。第1の位置特定信号が基地局送受信機(30、32)と移動局(22)の間で通信され、信号源の位置に関する情報を含む。複数の第2の位置特定信号が、対応の複数のレンジングビーコン装置(40、42、44)と移動局(22)の間で通信され、各々がレンジングビーコン装置(40、42、44)の位置に関する情報を含む。第1及び第2の信号によって移動局(22)の位置を決定することが可能となる。開示の例では、第1及び第2の信号が基地局(30、32)及び複数のレンジングビーコン装置(40、42、44)によってそれぞれ同時に送信される。  (もっと読む)
(もっと読む)
測位方式及び測位システム及び無線基地局
【課題】無線ノードの小型化・低消費電力化を図る。
【解決手段】位置測定信号を送信するノードと、基準信号を送信する基準局と、前記位置測定信号及び前記基準信号を受信する複数の基地局と、を有する無線通信システムにおいて、前記基準局は、前記位置測定信号を受信すると、前記位置測定信号の強度を測定し、前記測定した強度に基づいて定められる遅延時間の経過後、前記基準信号を送信し、少なくとも3の前記基地局は、前記位置測定信号を受信した時刻と、前記基準信号を受信した時刻とを測定し、前記基地局によって測定された前記位置測定信号の受信時刻、前記基準信号の受信時刻、及び前記基地局の位置情報を用いて、前記ノードの位置を計算する。
(もっと読む)
軌道推定装置および軌道推定方法
【課題】軌道推定精度の向上、および局所解への収束頻度の低減を図ることのできる軌道推定装置を得る。
【解決手段】複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび第1の情報を含む評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する収束演算部30と、収束演算部30で収束演算されることにより推定された軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、軌道決定パラメータの解を最適解と判定する収束判定部40とを備えた軌道推定装置において、収束演算部30は、複数の移動体の角度観測情報を第2の情報としてさらに入力し、軌道決定パラメータおよび第1の情報に加え第2の情報も加味した評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する。
(もっと読む)
通信システム、車載機及び路側機
【課題】移動する自車の走行位置を精度良く特定することができる通信システム、車載機及び路側機を提供する。
【解決手段】車載機20は、自車が光ビーコン10との通信領域Rに進入したと判定した場合、測位用の信号を路側機30へ送信する。路側機30は、各受信部31、32、33で測位用の信号を受信し、受信した信号の到達時間差を算出する。路側機30は、予め記憶してある各受信部31、32、33の位置及び算出した到達時間差に基づいて、車載機20の位置情報を算出し、算出した位置情報を測位結果として車載機20へ送信する。車載機20は、測位用の信号を送信した時点から測位結果である自車の位置情報を受信するまでの間の自車の走行距離、走行方位などに基づいて、測位結果を補正して自車位置を特定する。
(もっと読む)
位置検出システム
【課題】位置検出精度の高い位置検出システムを提供する。
【解決手段】無線LANを用いたシステムにおいて位置が既知(真の位置)のリファレンス端末106を位置検出エリアに固定して設置し、位置を検出すべき移動端末107とリファレンス端末106の位置を、サーバ105は基地局102、103および104を介しTDOA方式を用いて同時に検出する。そして、リファレンス端末106の位置検出結果と真の位置との差分を用いて移動端末107の位置検出結果を補正する。
(もっと読む)
散在U−TDOAワイヤレス位置検出ネットワーク
オーバーレイU−TDOAベースのワイヤレス位置検出システムにおいて、通例BTSと一緒に配置するLMUを用いて、順方向チャネルおよび逆方向チャネル双方において無線シグナリングを収集する。U−TDOAサービス・エリアの区間にアップリンク復調制限またはダウンリンク・ビーコン発見制限がある散在LMU配備を補償するための技法を用いる。 (もっと読む)
散在U−TDOAワイヤレス位置検出ネットワーク
オーバーレイU−TDOAベースのワイヤレス位置検出システムにおいて、通例BTSと一緒に配置するLMUを用いて、順方向チャネルおよび逆方向チャネル双方において無線シグナリングを収集する。U−TDOAサービス・エリアの区間にアップリンク復調制限またはダウンリンク・ビーコン発見制限がある散在LMU配備を補償するための技法を用いる。 (もっと読む)
散在U−TDOAワイヤレス位置検出ネットワーク
オーバーレイU−TDOAベースのワイヤレス位置検出システムにおいて、通例BTSと一緒に配置するLMUを用いて、順方向チャネルおよび逆方向チャネル双方において無線シグナリングを収集する。U−TDOAサービス・エリアの区間にアップリンク復調制限またはダウンリンク・ビーコン発見制限がある散在LMU配備を補償するための技法を用いる。 (もっと読む)
通信システム及び車載機
【課題】自車の走行位置を精度良く特定することができる通信システム及び車載機を提供する。
【解決手段】車載機40は、通信機10、20、30が送信した信号を受信する。車載機40は、通信機10が送信した信号の受信時点と、通信機20が送信した信号の受信時点との時間差である受信時間差t21を算出する。また、車載機40は、通信機10が送信した信号の受信時点と、通信機30が送信した信号の受信時点との時間差である受信時間差t31を算出する。車載機40は、通信機10、20、30の位置情報、遅れ時間Δt21、Δt31、受信時間差t21、t31に基づいて、自車位置を特定する。
(もっと読む)
ノード位置測定方法、ノード位置測定システム及びサーバ
【課題】二つ以上の基地局が信号を受信した場合に、ノードの位置を算出する。
【解決手段】ノードと、基準局と、複数の基地局と、サーバと、ネットワークと、を備えるノード位置測定システムであって、前記基準局は、前記測位信号を受信した場合に、基準信号を送信し、前記基地局は、前記測位信号及び前記基準信号を受信し、前記受信した測位信号及び基準信号から特定のパターンを検出し、前記測位信号から特定のパターンを検出してから前記基準信号から特定のパターンを検出するまでの時間を測定し、前記測定された時間を含む受信タイミング情報を、前記サーバに送信し、前記サーバは、前記基地局から受信した受信タイミング情報に基づいて、前記基準局が前記測位信号を受信した時刻と前記基地局が前記測位信号を受信した時刻との差を算出し、前記算出された差に基づいて、前記ノードの位置を算出することを特徴とする。
(もっと読む)
ダイバーシチ送信を伴う加入者位置測定のための無線電話システム
【課題】電話サービス/加入者位置特定サービス組み合わせシステムを提供する。
【解決手段】電話トラフィックを搬送するデータパケットを異なるアンテナから異なる時点で送信する。加入者装置は同一のデータパケットを異なる時点で異なるアンテナから受信し、最良のデータパケットまたはこれらデータパケットの組合せを用いてフェージングの影響を低減する。転送局は空間的に別個のアンテナ位置でデータパケット反復を形成する。また、転送局は移動局加入者と転送局との間のリンクを形成するTDMA信号を用いてCDMA系列を変調する。転送局が受信する各データパケットは移動局加入者にCDMAリンク経由で異なる時点で送信される。とくに、加入者局は反復データパケットの絶対到達時間と相対到達時間とを用いて加入者局から送信アンテナまでのそれぞれの距離を算定する。それら送信アンテナは既知の固定位置にあるので、受信機の位置が算定される。
(もっと読む)
無線ネットワークにおける協調位置特定
【課題】無線ネットワークにおけるある無線機器の自己位置を特定する、協調位置特定技術を用いたシステムを提供する。
【解決手段】無線ネットワークにおける少なくとも1つの他の無線機器からある無線機器が受信する信号の関数として任意の信号メトリックを推定する。このシステムではまた、少なくとも1つの他の無線機器の少なくとも1つの可能性のある位置の分布を表す、少なくとも1つの信念を変換して、少なくとも1つの変換後信念を生成する。このシステムではさらに、少なくとも1つの変換後信念の関数として自己信念を決定し、無線ネットワークにおける自己信念の関数として自己位置を特定する。
(もっと読む)
空港面監視システムおよび空港面監視方法
【課題】空港面に存在する目標の誤検出を減少し、誤ターゲットの表示を抑制できる空港面監視システムを提供する。
【解決手段】ASDE10を用いたASDE追尾系統とMLAT20を用いたMLAT追尾系統を備え、MLAT追尾系統は、MLAT20が出力する目標位置検出情報に基づいて目標近傍の領域に対してはASDE追尾系統のビデオレベル判定部13のスレッショルドレベルを下げ、目標近傍以外の領域に対してはビデオレベル判定部13のスレッショルドレベルを上げるASDEビデオレベル判定用マップ情報205をビデオレベル判定部13に出力するスレッショルドMAP作成処理部23を有している。
(もっと読む)
通信システム、車載機、車両及び送信機
【課題】自車の走行位置を精度良く特定することができ、自車の進行方向前方の所定位置までの距離を精度良く求めつつ所定位置まで到達することができる通信システム、車載機、送信機及び車両を提供する。
【解決手段】車載機20で領域Rにおける自車の位置を高精度に取得し、停止線Pまでの距離を高精度に算出する。また、車載機20は、送信機30、40、50から送信された信号の到達時間差、送信機30、40、50までの距離に基づいて、送信機30、40、50が送信する信号の周期の同期ずれを算出する。その後、自車が走行を続け、任意の走行地点で、送信機30、40、50から送信された信号の到達時間差、算出した同期ずれ及び送信機30、40、50の位置情報に基づいて、自車位置を特定する。
(もっと読む)
変位計測装置
【課題】低コストで、かつ高精度を実現することができる変位計測装置を得る。
【解決手段】変位計測点に設置された発信機1と、位置が既知である固定点に設置され、前記発信機1からの電波を受信する複数の受信アンテナ2と、前記複数の受信アンテナ2を切り替えるスイッチ3と、前記スイッチ3で選択された信号が入力される信号処理装置14とを設け、前記信号処理装置14は、前記スイッチ3で選択された、所定の組み合わせの受信アンテナ2で受信した信号間の位相差を計算して記憶し、次に前記スイッチ3を切り替えて別の組み合わせの受信アンテナ2で受信した信号間の位相差を計算して記憶し、これを繰り返すことにより得られた多数の受信アンテナの組み合せでの位相差を用いて、前記発信機1の位置を計算する。
(もっと読む)
測位システム、測定装置、および測定方法
【課題】コストの削減を図りつつ、移動端末から送信された電波の受信時刻を高い時間分解能で測定すること。
【解決手段】スイッチ101は、切替制御部106の制御に従ってアンテナANT#1〜#4を切り替えながら、いずれかのアンテナによって受信されたパルス波を含む信号を検波部102へ出力する。検波部102は、スイッチ101から出力された信号を検波し、信号に含まれるパルス波を順次受信時刻測定部105へ出力する。受信時刻測定部105は、検波部102から出力されるパルス波の受信時刻を測定し、測定結果を測定結果保持部107へ出力する。切替制御部106は、1本目のアンテナにおいて受信されたパルス波の受信時刻測定後、測距パルスのパターンからアンテナを切り替える切替タイミングを決定し、切替タイミングにおいてアンテナを切り替えるようにスイッチ101を制御する。
(もっと読む)
無線測位システムおよび無線測位方法
【目的】本発明は、移動端末の位置を無線で測位する無線測位システムおよび無線測位方法に関し、移動端末がいずれの基準局、基地局の受信範囲に移動しても確実に自動測位することを目的とする。
【構成】電波の測位信号を送信する移動端末と、移動端末から送信された測位信号を受信したときに測位信号の受信時刻および基準局から受信した基準信号の受信時刻を、自局のタイマをもとにそれぞれ計測する位置が既知の複数の基地局と、移動端末から送信された測位信号を受信したときに自局の基準信号を送信する位置が既知の複数の基準局と、基地局からの測位信号の受信時刻と基準信号の受信時刻を受信し、移動端末の位置を算出するサーバとを備え、複数の基準局が設定された優先度で、移動端末からの測位信号を受信したときに自局の基準信号を複数の基地局に送信し、衝突を回避する。
(もっと読む)
121 - 140 / 218
[ Back to top ]