
Fターム[5J062CC15]の内容
Fターム[5J062CC15]に分類される特許
21 - 40 / 47
測位装置、携帯端末装置、測位システム及び測位方法
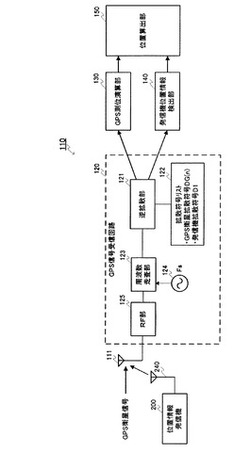
【課題】基地局を信号発信源の一つとして扱う複合測位ができない次世代通信システムにおいて、屋内又は不感地での測位を高精度に実現することができる測位装置、携帯端末装置、測位システム及び測位方法を提供すること。
【解決手段】測位システムは、GPS衛星を用いた測位装置110を有する携帯電話機100と、GPSが受信できないエリア(屋内、不感地エリアなど)に設置され自機の位置情報を発信する位置情報発信機200とを備え、位置情報発信機200は、GPS信号周波数と同一周波数帯域の無線信号を発信し、測位装置110のGPS信号受信回路120は、GPS衛星信号と位置情報発信機200の位置情報の信号を同じ受信回路により受信し、位置算出部150は、GPS測位計算結果と位置情報発信機200の位置情報に基づいて携帯電話機100の位置を算出する。
(もっと読む)
歩幅算出装置、歩行距離特定装置、位置特定装置、コンピュータプログラム及び歩幅算出方法

【課題】歩行者の位置を精度良く特定するための歩行者の歩幅を算出する歩幅算出装置、歩行距離特定装置、位置特定装置、コンピュータプログラム及び歩幅算出方法を提供する。
【解決手段】相関パラメータ算出部172は、歩行者の歩幅と一歩毎の歩行速度との相関パラメータを算出する。2地点間の歩行距離をd、2地点間の歩行者の歩数をn、2地点間の一歩毎の歩幅の列をwi(i=1、2、…n)、2地点間の一歩毎の歩行速度の列をvi(i=1、2、…n)とすると、歩幅と歩行速度との相関関係は、d=Σwi=α・Σvi+n・βで表わすことができる。ここで、α、βは相関パラメータである。歩幅算出部173は、距離センサ132等で歩数及び一歩毎の歩行速度を取得し、取得した歩数及び歩行速度と相関パラメータα、βとにより一歩毎の歩幅を算出する。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を特定する特定精度の向上を計ることができる位置特定装置、位置特定装置を実現するコンピュータプログラム及び位置特定方法を提供する。
【解決手段】信号機が設置された交差点に関する交差点情報に基づいて歩行者の位置を特定する位置検出装置10であって、交差点情報を受信し、受信した交差点情報に基づいて、交差点の位置を取得する。また、信号機が青信号と赤信号とを切り替える信号切替タイミングを、受信した交差点情報に基づいて取得する。操作部16から操作を受け付けたタイミングが、取得した信号切替タイミングと合致するか否かを判定し、合致する場合、歩行者の位置を、交差点の位置と特定する。
(もっと読む)
電波回折推定装置、電波回折推定システム、コンピュータプログラム及び電波回折推定方法
【課題】送信機からの電波の回折度合いを推定し、推定結果に応じて車両の位置を精度良く特定することができる電波回折推定装置、電波回折推定システム、コンピュータプログラム及び電波回折推定方法を提供する。
【解決手段】制御部30は、周辺車両300の形状情報、位置情報を取得し、自車両の予測位置を求め、送信機200との仮想直線を特定する。制御部30は、送信機200からの電波を受信して電波測位位置を求める。制御部30は、周辺車両300の形状情報、車間距離、仮想直線などに基づいて周辺車両300による仮想遮蔽面を特定し、仮想遮蔽面と仮想直線などに基づいて電波の回折角度θを算出する。制御部30は、算出した回折角度に応じて重み付け係数を設定し、設定した重み付け係数、予想位置及び電波測位位置に基づいて、自車位置を特定する。
(もっと読む)
ワイヤレス位置検出システムの自動構成設定
オーバーレイ、ネットワークベースのワイヤレス位置検出システムにおいて、TDOAおよび/またはAoA測位方法において用いるための順方向および逆方向チャネル双方における無線シグナリングを収集するために、位置測定ユニット(LMU)を用いる。無線ネットワークからグローバル衛星ナビゲーション・システム・コンスタレーションによってブロードキャストされた情報は、LMUによって受信することができ、無線ネットワークの変化による初期システムの構成設定および構成再設定の困難を軽減するために用いることができる。 (もっと読む)
位置情報提供システムおよび屋内送信機
【課題】電波が届かない場所において位置情報を提供する。
【解決手段】屋内送信機はプログラマブルに送信信号のフォーマットを変更可能であり、位置情報提供装置が実行する処理は、受信された測位信号を取得するステップ(S610)と、測位信号の発信源を特定するステップ(S612)と、測位信号の発信源が屋外である場合に、測位信号に含まれる航法メッセージを取得するステップ(S622)と、その信号に基づいて位置を算出するための処理を実行するステップ(S624)と、測位信号の発信源が屋内である場合に、測位信号からメッセージデータを取得するステップ(S632)と、そのデータから座標値を取得するステップ(S634)と、その座標値に基づいて位置情報を表示するステップ(S650)とを含む。
(もっと読む)
測位誤差発生判定方法、測位位置出力制御方法、測位方法、プログラム、記憶媒体及び測位装置
【課題】測位演算において測位誤差が発生したか否かをより正確に判定すること。
【解決手段】GPS衛星SからのGPS衛星信号に基づいて測位演算により測位された測位位置の変化と、各測位演算時点で無線LAN基地局であるアクセスポイントAPから受信されたビーコン信号の変化とに基づいて、測位誤差の発生が判定される。具体的には、同一のアクセスポイントAPからのビーコン信号の連続受信が検出され、且つ、前回測位位置と最新測位位置間の距離が無線LAN信号到達距離より大きい場合に、測位誤差が発生していると判定され、最新測位位置ではなく前回測位位置が出力される。
(もっと読む)
地上局ベースのセルラネットワークを用いた移動局位置特定を促進する方法
セルラ通信に通常使用される無線周波数スペクトルを用いた通信によって移動局(22)の位置特定を促進する。第1の位置特定信号が基地局送受信機(30、32)と移動局(22)の間で通信され、信号源の位置に関する情報を含む。複数の第2の位置特定信号が、対応の複数のレンジングビーコン装置(40、42、44)と移動局(22)の間で通信され、各々がレンジングビーコン装置(40、42、44)の位置に関する情報を含む。第1及び第2の信号によって移動局(22)の位置を決定することが可能となる。開示の例では、第1及び第2の信号が基地局(30、32)及び複数のレンジングビーコン装置(40、42、44)によってそれぞれ同時に送信される。  (もっと読む)
(もっと読む)
通信システム、車載機及び路側機
【課題】移動する自車の走行位置を精度良く特定することができる通信システム、車載機及び路側機を提供する。
【解決手段】車載機20は、自車が光ビーコン10との通信領域Rに進入したと判定した場合、測位用の信号を路側機30へ送信する。路側機30は、各受信部31、32、33で測位用の信号を受信し、受信した信号の到達時間差を算出する。路側機30は、予め記憶してある各受信部31、32、33の位置及び算出した到達時間差に基づいて、車載機20の位置情報を算出し、算出した位置情報を測位結果として車載機20へ送信する。車載機20は、測位用の信号を送信した時点から測位結果である自車の位置情報を受信するまでの間の自車の走行距離、走行方位などに基づいて、測位結果を補正して自車位置を特定する。
(もっと読む)
ビーコンを用いた電波識別リーダーの位置測定方法及びそのための電波識別システム
本発明は、ビーコンを用いた電波識別リーダー(RFID Reader:Radio Frequency Identification Reader)の位置測定方法及びそのための電波識別システムに関するものである。
本発明は、位置を測定する電波識別システムであって、ビーコンを送出する複数個のビーコン装置と、電波識別を用いて既格納された情報を送信する電波識別タグと、移動中に複数個のビーコン装置から複数個のビーコンを受信すれば、複数個のビーコンを用いて現在位置を計算し、電波識別を用いて電波識別タグから情報を受信する電波識別リーダーと、を含むことを特徴とするビーコンを用いた電波識別リーダーの位置を測定するための電波識別システムを提供する。本発明によれば、電波識別システムで移動する電波識別リーダーの位置を測定することができ、電波環境を考慮して電波識別リーダーの位置を測定するので、位置測定の正確度を上げることができる。  (もっと読む)
(もっと読む)
OFDMA方式のシステムにおける位置を推定する装置、方法及びコンピュータアクセス可能な媒体
本発明の実施例は、ダウンリンクにおいて基地局により又はアップリンクにおいて移動局により、少なくとも1つのトーンに電力が集中したシングル又はマルチトーンのロケーションビーコンを送信することで、無線ネットワークにおける移動局の位置を判定するステップを有する方法を提供する。  (もっと読む)
(もっと読む)
携帯通信端末の相対位置特定システム、方法、プログラム、携帯通信端末
【課題】GPSなどが十分な能力を発揮できず、基地局圏外である屋内、屋外フィールドの環境下にある相手に対する相対位置を特定する。
【解決手段】捜査側の協力を行う携帯通信端末200Bでは無線ビーコン送受信部211,222,220で計測された最大の信号強度に対して方位計260で計測された方位、GPS計測部208,209に計測させた自局の絶対位置を無線送受信部211,210を介して捜査側の携帯通信端末200Aに送信させ、捜査側の携帯通信端末では被捜査側の携帯通信端末200Xに対して無線ビーコンを送出させ、無線ビーコン送受信部で計測された最大の信号強度に対して方位計で計測された方位、GPS計測部に計測させた自局の絶対位置と捜査側の協力を行う携帯通信端末200Bから受信した方位、自局の絶対位置とから三角測量の原理に基づき被捜査側の携帯通信端末に対する相対位置を特定し表示する。
(もっと読む)
測位システム、自律測位装置及びマーカ管理装置
【課題】測位対象から最も近くに設置されている測位対象検知器の位置を示す情報を受信して、確実かつ正確に測位対象の位置を補正することができるようにする。
【解決手段】自律測位装置2が測位対象1の位置を測位すると、測位対象1の位置を示す位置情報をマーカ管理装置7に送信し、マーカ管理装置7が自律測位装置2から送信された位置情報を参照して、屋内環境下に設置されている複数のRFIDリーダ4の中で、測位対象1から最も近くに設置されているRFIDリーダ4を特定し、そのRFIDリーダ4の検知感度を高める。
(もっと読む)
通信システム、車載機、車両及び送信機
【課題】自車の走行位置を精度良く特定することができ、自車の進行方向前方の所定位置までの距離を精度良く求めつつ所定位置まで到達することができる通信システム、車載機、送信機及び車両を提供する。
【解決手段】車載機20で領域Rにおける自車の位置を高精度に取得し、停止線Pまでの距離を高精度に算出する。また、車載機20は、送信機30、40、50から送信された信号の到達時間差、送信機30、40、50までの距離に基づいて、送信機30、40、50が送信する信号の周期の同期ずれを算出する。その後、自車が走行を続け、任意の走行地点で、送信機30、40、50から送信された信号の到達時間差、算出した同期ずれ及び送信機30、40、50の位置情報に基づいて、自車位置を特定する。
(もっと読む)
位置推定システム
【課題】特定の伝播経路を経て携帯端末から伝送される識別情報の電波に受信強度のレベル変動が生じても、それにより携帯端末の位置推定の精度が低下しないようにする。
【解決手段】アンテナ21a等は互いの間隔が位置ビーコン信号の電波のλ/4以上離間した状態で位置推定ノード3本体に配置される。位置ビーコン信号受信部25はアンテナ21a等が受信した位置ビーコン信号からアンテナ切替情報をアンテナ選択部23に、送信元認識番号情報等を受信電波強度測定部27に、出力する。アンテナ選択部23はアンテナ21a等の何れか1つと入力端子22との接続を切替える。受信電波強度測定部27は位置ビーコン信号の電波強度を測定する。電波強度情報送信部31は、位置ビーコン信号の間欠的な送信が終了した時の受信電波強度の最大値を位置推定サーバ13へ送信する。
(もっと読む)
ポータプルの測位およびナビゲーション・システム
【課題】未知の領域でのナビゲーションを補助するナビゲーション・システムを提供する。
【解決手段】ナビゲーション・システムは、複数の無線周波数識別(RFID)タグと、少なくとも1つのポータル端末と、少なくとも1つのナビゲーション・デバイスとを含む。複数のRFIDタグは、移動する領域全体にわたって配置される。少なくとも1つのポータル端末は、移動する領域への入口付近に配置する。少なくとも1つのポータル端末は、移動する領域のマップをアップロードする。マップは、各RFIDタグの位置を含む。少なくとも1つのナビゲーション・デバイスは、ポータル端末からマップをダウンロードする。少なくとも1つのナビゲーショナル・デバイスは、更に、複数のRFIDタグの1または複数のものを検出し、それに少なくとも部分的に基づいて、移動する領域内でのそのデバイスの位置を表示する。
(もっと読む)
車両位置検出システム
【課題】本発明は、車両位置をより高精度で検出できる車両位置検出システムを提供することを課題とする。
【解決手段】自車の位置を検出することができる車両位置検出システム10において、自車に搭載され、GPS衛星からのGPS信号を受信するGPS受信部12と、自車に搭載され、交差点手前に配置される光ビーコンからの光ビーコン情報を受信する光ビーコン通信手段14と、自車に搭載され、光ビーコン通信手段14で光ビーコン情報を受信したら、この光ビーコンの情報に基づいて自車の位置を補正する中央処理装置19とを備えている。
(もっと読む)
ナビゲーション装置および位置算出方法
【課題】位置情報送信ユニットからの位置情報から現在位置を取得するナビゲーション装置において、より正確な位置情報を得ることができるナビゲーション装置を提供する。
【解決手段】位置情報送信ユニット100はナビゲーション装置30に近距離無線通信規格に基づき位置情報を送信する。ナビゲーション装置30は経路探索サーバ20から案内経路を受信する。ナビゲーション装置30において、位置情報取得部34、位置算出部35、方位検出部36を備え、位置算出部35は、位置情報を受信した位置情報送信ユニット100の通信エリアに入る時、出る時に、通信エリアの円とリンクの交点のうち、方位検出手段36が検出した方位と合致する交点をそれぞれ現在位置として算出する。
(もっと読む)
ハイブリッド位置判断システムにおける誤差推定値を判断するための方法および装置
【課題】マルチパシングによって生じる誤差を判断し、位置判断測定の誤差推定を向上する。
【解決手段】データベースを設定し、その中に、ビーコンに対する特定の疑似範囲の測定値に対して推定された誤差量を維持する。クラスタを定める。各クラスタは、選択したパラメータに対する値の範囲と関係付けられている。次に、疑似範囲の測定値は、疑似範囲の測定値をとった時間(または、その時間の前後を含む時間)における選択したパラメータ値に基づいて、特定のクラスタと関係付ける。求めた疑似範囲の測定値の推定値の数がより多くなると、クラスタのサイズ(すなわち、選択したパラメータ値の範囲)を小さくすることができる。選択したパラメータと疑似範囲の測定値における誤差との相関によって、クラスタのサイズが小さくなると、誤差推定値の分散が小さくなる。誤差推定値の平均値を使用して、将来の疑似範囲の測定値の誤差を補正する。
(もっと読む)
運転支援システム
【課題】車線数,車両進行方向の如何を問わず、障害物の影響を受けることなく、安価なシステム構築で車両の位置および速度の検出を可能にする。
【解決手段】道路の交差点の中心近傍に、全方位へ無線信号を放射することにより通信エリア内にて特定の移動体と通信が可能な無線局10を配置する。移動体20〜24は、GPS衛星からのデータを受信することで該移動体の位置および速度を検出するGPS装置と、検出した位置および速度を随時記憶する記憶装置と、無線局と通信を行う無線装置とを備える。無線局が送出したビーコンに対する移動体の反応により当該移動体を発見すると、当該移動体から受信した移動体の位置および速度を通信エリア内に存する本サービス対象の他の移動体へ送信する。
(もっと読む)
21 - 40 / 47
[ Back to top ]