
Fターム[5J070AA14]の内容
レーダ方式及びその細部 (42,132) | 一般 (555) | アンテナ角度信号の発生又は検出 (94)
Fターム[5J070AA14]に分類される特許
1 - 20 / 94
レーダ通信装置
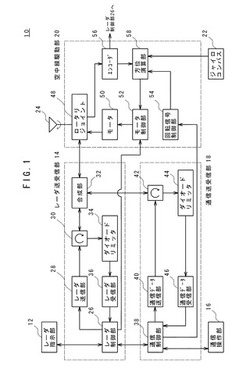
【課題】空中線が回転駆動して他船の船舶に対して、通信データを送信することが可能なレーダ通信装置を提供する。
【解決手段】
レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部14と、通信データの送受信を行う通信送受信部18とを備え、通信データをレーダ波に合成して送受信することにより空中線が回転する他船と通信する装置であって、自船の空中線を回転駆動するモータを制御するモータ制御部52と、他船の真方位θtを取得し、他船の空中線の回転周期Tを算出し、自船の空中線θsが他船の空中線に対して正対するときの時刻である正対時刻tを算出するレーダ制御部12と、を有し、モータ制御部52は、自船の空中線を、レーダ制御部26によって算出された正対時刻tまでに、他船の真方位θtに自船の空中線の真方位θsが一致する位置に待機させ、通信送受信部16は、他船と通信する。
(もっと読む)
スキャン相関処理装置、レーダ装置、及びスキャン相関処理方法

【課題】レーダ映像の分解能を向上させる場合においても、スキャン相関処理におけるメモリ使用量の増加を抑制する。
【解決手段】スキャン相関処理装置は、1回前に算出された出力値に対応する級を選択するとともに、入力されるスイープデータ値に対応する級を選択する級選択部と、出力値に対する級と、スイープデータ値に対する級との組合せそれぞれに、出力値を算出する演算を示す命令コードを対応付けた命令テーブルを予め記憶している命令記憶部と、級選択部が選択した1回前に算出された出力値に対応する級と、入力されるスイープデータ値に対応する級との組合せに応じた命令コードを命令記憶部から読み出す命令コード読出部と、命令コード読出部が読み出した命令コードに基づいて、1回前に算出された出力値、及び入力されるスイープデータ値から出力値を算出する演算部とを備える。
(もっと読む)
モノパルス給電回路
【課題】本発明は、複数のアンテナに並行して到来した到来波の和と差とのパターンを得ることにより、その到来波の到来方向の計測等を可能とするモノパルス給電回路に関し、従来例に比べて構成が簡略化され、かつ実装上の制約の緩和が大幅に図られると共に、軽量化および小型化が可能であることを目的とする。
【解決手段】互いに貫通して交叉する導波路を形成する第一の導波管と、前記第一の導波管の側壁の内、前記導波路が交叉する部位に突設され、前記導波路を拡張する第二の導波管とを備え、前記導波路の4つの末端から前記部位までの長さは、個別に点対称に配置された2対のアンテナの個々の給電点から前記4つの末端をそれぞれ介して前記部位に至る4つの区間の伝搬路長が同じとなる値に設定される。
(もっと読む)
回転駆動装置および電波レンズアンテナ装置
【課題】 小型化と動作精度の向上との両立を図ることが可能な回転駆動装置および電波レンズアンテナ装置を提供すること。
【解決手段】 それぞれが出力端を有しており、かつ互いに独立に軸回転する外筒軸5および内筒軸4を備えており、外筒軸5の出力端の回転駆動力を駆動源として一対のルネベルグレンズ21を駆動するとともに、外筒軸5および内筒軸4の出力端の回転数差によって生じる回転駆動力によって一対のフィード22を駆動する
(もっと読む)
レーダ装置、アンテナ制御方法、及びプログラム
【課題】アンテナ開口の方位の変更動作を行う際に、消費電力を抑えつつ、追尾を継続する。
【解決手段】アンテナ開口の方位の変更のために空中線部1−3を駆動させると、空中線部1−2のビーム走査範囲の端から空中線部1−3のビーム走査範囲の端までの範囲が、走査されない範囲となる。空中駆動部1−3を駆動させている間、空中駆動部1−3の駆動によって発生する走査されない範囲をカバーし、かつ空中駆動部1−2、1−3同士のビームの走査範囲が重複しないように、空中駆動部1−2、1−3のそれぞれのビームの走査範囲を逐次変更する。
(もっと読む)
レーダ装置
【課題】多面構造を有するフェーズドアレイ方式のレーダ装置において、いずれかの放射面が故障した場合等にも対処可能な高信頼性や運用面における多機能性を備えたレーダ装置を提供する。
【解決手段】非回転のフェーズドアレイ方式により全周方向についての捜索が可能なレーダ装置であって、フェーズドアレイアンテナによる複数のアンテナ面(空中線1a,1b,1c,1d,1e,1f)が多面体を形成するとともに、所定の方角を複数のアンテナ面のうち少なくとも2つのアンテナ面が捜索可能な覆域に含む空中線部と、空中線部が有する複数のアンテナ面のいずれかを選択し、選択したアンテナ面を介して送信信号を送信するとともに受信信号を受信する1以上の送受信機2と、1以上の送受信機2の各々に対応して設けられ、送受信機2により受信された受信信号に基づいて受信ビームを形成する1以上のビーム形成部3と、ビーム形成部3により形成された受信ビームに基づいて信号処理することで目標検出を行うレーダ信号処理部4とを備える。
(もっと読む)
気象レーダ装置及び気象観測方法
【課題】突発的かつ局地的な気象現象を高精度に観測できるようにする。
【解決手段】気象レーダ装置は、複数のアンテナ素子から電波を送信し、位相制御により仰角方向にビーム走査を行って気象目標からの反射波を受信するアンテナユニット11と、前記アンテナユニット11の開口面の仰角と方位角とを駆動する駆動ユニット12と、複数の観測モードにしたがって前記アンテナユニット11及び前記駆動ユニット12により観測範囲と観測仰角とを調整する空中線調整装置5と、前記反射波の受信信号に基づいて前記観測モードを設定する監視制御装置4とを具備する。
(もっと読む)
マグネトロンの陰極加熱装置、マイクロ波発生装置、及びマグネトロンの陰極予熱方法
【課題】マグネトロンの予熱時間を良好に短縮することができる陰極加熱装置を提供する。
【解決手段】マグネトロンの陰極加熱装置は、ヒータ26と、電流検出計22と、制御部27と、を備える。ヒータ26は、マグネトロン25の陰極をジュール熱によって加熱する。電流検出計22は、ヒータ26に流れるヒータ電流の電流値を検出する。制御部27は、ヒータ電流の電流値の変化量に基づいて、マグネトロン25の予熱の完了を判断する。
(もっと読む)
レーダ情報伝送システム、レーダ情報送信装置及びレーダ情報伝送方法
【課題】簡易な構成で効率良くレーダ情報を伝送すること。
【解決手段】SSRセンサ信号処理装置1と遠隔装置2との間は、1本の高速シリアル伝送路3を介して接続される。送信回路11は、レーダによる観測情報を含むディジタルデータをシリアルデータに変換し、レーダの方位信号により発生される角度パルスに基づいて上記シリアルデータに特定の同期コードを挿入し、このシリアルデータを高速シリアル伝送路3を介して遠隔装置2に送信する。受信回路21は、高速シリアル伝送路3を介して上記シリアルデータを受信し、受信したシリアルデータから上記ディジタルデータを再生すると共に、シリアルデータに含まれる特定の同期コードをもとに上記角度パルスを再生する。
(もっと読む)
レドームのボアサイトエラー試験装置及びレドームのボアサイトエラー試験方法
【課題】レドームのボアサイトエラーをより容易に測定すること。
【解決手段】試験装置1は、電波を発生する電波発生装置11と、電波を受信するアンテナBを覆うレドームAが取り付けられ、電波に対するレドームAの角度を変更できるようにレドームAを支持するレドーム支持装置20と、アンテナBが取り付けられ、レドームAとは別にアンテナBの走査角度を変更できるようにアンテナBを支持するアンテナ支持装置30と、アンテナBが受信した電波を信号として取得する制御解析装置40と、を備える。さらに、試験装置1は、電波発生装置11からの電波を反射すると共に球面波である電波を平面波に変換し、平面波をアンテナBへと導くコンパクトレンジ12をさらに備えることが望ましい。
(もっと読む)
アンテナビーム指向装置及びアンテナビームの指向方法
【課題】デジタル演算処理のみでアンテナビームの指向精度を高めることができるアンテナビーム指向装置を提供すること。
【解決手段】参照信号(ビーコン信号)の入力時に、入力ベクトル信号と重み付け係数ベクトルとの内積がゼロとなるようにして参照信号方向にヌルビームを誤差なく指向させ、このとき、ヌルパターンを構成する重みづけ係数を算出する。入力ベクトル信号の時間変化(入力ベクトルX(t) )とヌル信号生成の重みづけ係数の時間変化(重み付け係数W(t))との内積により、受信信号出力の時間変化(Y(t))を生成し、さらに、このY(t)から、参照信号との誤差成分e(t)を算出し、最終的に、この誤差成分e(t)が零となるように制御する。
(もっと読む)
自動追尾レーダ装置および自動追尾方法
【課題】雑音帯域幅の狭い追尾ループでの追尾を可能とし、追尾限界となるS/N比を改善することが可能な自動追尾レーダ装置を提供する。
【解決手段】ロケットやスペースデブリ等の飛翔体を自動追尾する自動追尾レーダ装置として、前記飛翔体を初期捕捉して、自動追尾モードに移行した以降において、アンテナ指向追尾系ループのアンテナ指向誤差検出器16、積分器17および距離追尾系ループの距離誤差検出器23、積分器24にて検出されたアンテナ指向誤差および距離誤差に基づき、アンテナ追尾ループフィルタ18および距離追尾ループフィルタ25それぞれにて生成されるアンテナ指向角度の制御情報および受信タイミングの制御情報を、予見情報(角速度、各加速度)加算器27および予見情報(速度、加速度)加算器26にて、前記飛翔体の軌道予測値、他のレーダ装置の追跡情報または過去の追跡データに基づく予測値である予見情報を用いてさらに補正する。
(もっと読む)
レーダ装置、および、アンテナ角度調整方法
【課題】アンテナの角度調整中に生じた要因に伴う誤った角度調整を防止し、目的とする角度への正確な角度調整を行うことができる技術を提供する。
【解決手段】アンテナの傾き角度に基づいて、アンテナの角度を目的角度に調整するレーダ装置において、アンテナの角度調整手段により調整されるアンテナの目的角度への調整の判定基準となる調整予測値を算出して、この調整予測値とアンテナの角度変化に伴う計測値との誤差に基づいて調整不良を検出する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】移動する物標を固定物標と区別して表示できる機能を簡易な構成で実現できる画像処理装置を提供する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、真航跡用画像メモリ42と、移動物標判定処理部44と、を備える。移動物標判定処理部44は、真航跡用画像メモリ42に記憶される物標の絶対的な位置変化を示す真航跡データ群から、他船の航跡を示す画素情報の値であって、所定の条件を満たす画素情報の値を有するトリガ画素を探索する。そして、移動物標判定処理部44は、トリガ画素から、物標が存在することを示す所定値が画素情報として設定されている画素まで所定方向で連続する一連の画素において、画素情報の値が、トリガ画素の画素情報の値から所定値に近づく傾向を示している場合に、所定値が設定される画素を移動物標が存在する画素位置と判定する。
(もっと読む)
気象レーダ装置及び気象観測方法
【課題】突発的かつ局地的な気象現象を的確に観測できるようにする。
【解決手段】気象レーダ装置は、複数のアンテナ素子から電波を送信し、位相制御により仰角方向にビーム走査を行って気象目標からの反射波を受信するアンテナユニット11と、前記アンテナユニット11の開口面の仰角を駆動する駆動ユニット12と、前記駆動ユニット12により前記開口面を観測範囲の最大距離方向に正対させた状態で前記アンテナユニット11に前記ビーム走査を行わせ、前記反射波の受信信号をもとに前記気象目標を探知した時点で、前記駆動ユニットに前記開口面を前記気象目標に向けて正対させる監視制御装置4とを具備する。
(もっと読む)
レーダ装置、信号処理装置
【課題】
指向角度を間引いてレーダ信号を送出しても物標の角度検出精度の低下を防止する。
【解決手段】
アンテナが第1の方向に回動するときには、前記アンテナにより間欠的な第1の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第1のビート信号群を生成し、前記第1の方向と反対の第2の方向に回動するときには、前記アンテナにより前記第1の指向角度群とは異なる間欠的な第2の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第2のビート信号群を生成する。そして、前記第1のビート信号群の第1のピークと、前記第2のビート信号群の第2のピークとを検出し、前記第1のピーク形状における極大値と前記第2のピーク形状における極大値とに基づき、物標の角度を検出するので、物標の角度検出精度の低下を防止することができる。
(もっと読む)
レーダ装置
【課題】衝突危険度の高い物標を確実かつリアルタイムに把握することができるレーダ装置を提供する。
【解決手段】レーダ装置は、レーダアンテナ1と、表示器8と、速度推定部22と、データ発生部6と、を備える。レーダアンテナ1は、水平面内で回転しながらパルス状の信号の送受信を繰り返す。表示器8は、自装置周囲の物標の位置を示すレーダ映像を表示する。速度推定部22は、自装置からの電波の放射方向成分における自装置と物標との相対速度を推定する。データ発生部6は、速度推定部22が推定した前記物標の相対速度に基づいて当該物標の危険度を求める。また、速度推定部22は、レーダアンテナ1が今回受信したエコーと、当該レーダアンテナ1が直前に受信したエコーと、の間の位相変化に基づいて前記相対速度を検出する。そして、表示器8は、前記レーダ映像を表示する際に、危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
(もっと読む)
レーダ装置空中線
【課題】機能用途の異なるレーダ装置で用いる空中線を共通化したレーダ装置空中線を得る。
【解決手段】 複数の移相器が直線状に配列された一次元フェイズドアレー空中線を構成し、レーダ装置本体からの制御信号に基づき、この一次元フェイズドアレー空中線を回動させてアレーの配列方向を仰角方向または方位方向に保持する機構を備えるとともに、配列の方向には高速での走査が可能な電子走査によるビーム走査を行いつつ、方位方向には機械走査または対象方位への駆動・停止を可能にすることによって、レーダ装置本体の備える機能に応じて、方位方向、及び仰角方向の走査モードを種々に組み合わせる。
(もっと読む)
レーダ反射断面積計測装置
【課題】 レーダ反射断面積計測装置において、不要反射波を抑圧して高精度な計測を行うことを目的とする。
【解決手段】 レーダ反射断面積の予備計測で測定した振幅および位相データを周波数分析することで、反射強度分布の算出を行い、レーダ反射断面積の振幅値の強度分布をマッピングし、あらかじめ設定したスレッショルドレベル以上の振幅値をもつ領域を検出して、不要反射源の方位を判定し、不要反射源の方位にナル点ができるように、送信アレイアンテナの各素子に与える位相値を算出し、送信アレイアンテナおよび受信アレイアンテナの各移相器に設定してから、レーダ反射断面積の本計測を行う。
(もっと読む)
レーダ装置
【課題】検出した各物標のエコーの種類を正確に識別するレーダ装置を提供する。
【解決手段】挙動データ発生部11は、エコーデータが物標検出閾値以上であるかを判定し、判定結果に基づく挙動判定用データを生成するとともに、挙動判定用データを過去数スキャン分並べた挙動データPnを生成する。連続性検出部9は、エコーデータのスイープの方位方向およびスイープの回転方向である距離方向に対する連続性を検出し、連続性データAnを生成する。エコー種類判定部6は、今回のエコーデータが固定物標のエコーか移動物標のエコーか不要波のエコーかを、挙動データPnおよび連続性データAnを組み合わせて判断する。さらには、海面反射領域設定部14からの海面反射領域データBnを用いることで、海面反射のエコーであるかも判断する。
(もっと読む)
1 - 20 / 94
[ Back to top ]