
Fターム[5J070AC20]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | その他 (52)
Fターム[5J070AC20]に分類される特許
1 - 20 / 52
イメージング装置及びイメージング方法
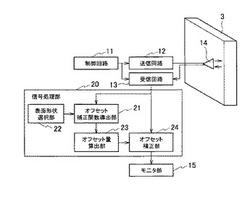
【課題】近傍界イメージングにおいて、イメージング像の高分解能化を可能とする。
【解決手段】送信回路12からミリ波を出力させて送受信アンテナ14から放射し、受信回路13により、観測対象物3の表面で反射したミリ波を送受信アンテナ14を介して測定信号として受信し、測定信号のIQ値から反射信号のIQ値を算出するオフセット補正関数の未知数を求めてオフセット補正関数を導出し、測定信号のIQ値からオフセット補正関数で算出した反射信号のIQ値を引いて散乱信号のIQ値を求める。これにより、イメージング像の高分解能化が可能となる。
(もっと読む)
電波受信装置及び電波受信方法

【課題】複数の目標を短時間で識別し得る電波受信装置及び電波受信方法を提供する。
【解決手段】指示された周波数帯域内の電波を受信する受信手段と、この受信手段の出力を時間軸信号から周波数軸信号に変換するFFT(高速フーリエ変換)手段と、このFFT手段の出力から周波数帯域内に存在する複数の目標からの受信波をそれぞれ識別する目標識別手段とを備えた電波受信装置を提供できる。
(もっと読む)
人感センサおよび空調装置
【課題】 演算コストの低い人感センサおよびこれを用いた空調装置を提供する。
【解決手段】ドップラーセンサと、信号強度を記憶する記憶部と、信号強度の少なくとも一部が第1の閾値より大きいかどうかを比較する信号強度比較部と、記憶部の少なくとも一部の分散値が第2の閾値より大きいかどうかを比較する分散値比較部と、比較結果とに基づいて設置された空間の人間の状態を推定する推定部と、を有する。
(もっと読む)
前方環境認識装置、およびそれを備えた車両誘導システム
【課題】ゲート手前に車両が並んでいる場合であっても、自車両前方の物標情報を検出して、ゲートを認識することが可能な前方環境認識装置、およびそれを備えた車両誘導システムを提供する。
【解決手段】検出された物標Pの情報に基づいて、物標Pの平面分布形状Hを算出する。前方環境認識装置1は、平面分布形状Hから、自車両側へ突出する山型分布形状Y1〜Y3を判別し、判別された山型分布形状Y1〜Y3に対応する位置に障害物C1〜C3が存在するゲートG1〜G3が有ると認識する。これにより、ゲートG1〜G3の手前に他車両C1〜C3などの障害物が存在する場合であっても、自車両前方の物標Pの情報を検出して、ゲートG1〜G3を認識することができる。
(もっと読む)
水稲作付け状況把握システム、水稲作付け状況把握方法、及び水稲作付け状況把握プログラム
【課題】SARにより撮影された画像に基づいて水稲作付け状況を把握する際に、湛水された圃場を決定する閾値の客観性の確保が難しい。
【解決手段】クラスター分析部60は、圃場に入水し苗を移植する田植え期と、入水前である圃場準備期及び移植した水稲が苗より生長した状態となる水稲生長期の少なくとも一方とを含む2時期又は3時期についての観測対象領域のSAR画像を取得し、観測対象領域の各点での画素値の組をサンプルとしてクラスター分析を行い5クラス以上に分類する。圃場判定部70は、観測対象領域に存在する注目圃場内のサンプルのクラス毎の個数がクラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が水稲圃場であるか否かを判定する。
(もっと読む)
物体の向き検出システム
【課題】簡易かつ安価で正確に物体の姿勢を検出できる物体の向き検出システムを提供することを目的とする。
【解決手段】測定対象物30の両面にはRFタグユニット20a,20bが取り付けられている。RFタグユニット20a,20bは、それぞれRFタグ21a,21bと高透磁率シート22a,22bと電磁波遮断シート23a,23bとが順に積層されている。RFタグリーダ10の送信信号生成部11で生成された送信信号は、アンテナ13から電磁波として放射される。受信信号判定部12は、RFタグ21a,21bからの応答の有無に基づいて、測定対象物30のいずれの面がRFタグリーダ10のアンテナ13側を向いているのか判定し、うつ伏せ状態を検出する。
(もっと読む)
電子情報受信機の信号識別方法
【課題】多重経路信号と意図しないMOPによる未識別または誤識別を防止して信号パラメータを抽出することができる電子情報受信機の信号識別方法を提供する。
【解決手段】本発明に係る電子情報受信機の信号識別方法は、受信した信号から直接経路信号と多重経路信号によるMOP(modulation on pulse)の開始時点および終了時点を検出するステップ;前記信号の開始時点から前記MOPの開始時点までの区間における前記信号のインフェーズ成分とクアドラチャ成分を利用して、信号強さ、周波数、位相のうちの少なくとも1つを抽出するステップ;および前記信号の開始時点から前記MOPの終了時点までの区間を前記信号のパルス幅として抽出するステップを含むことを特徴とする。
(もっと読む)
気象レーダシステムとその降水量算出方法
【課題】観測パラメータから降水粒子のカテゴリーを判定し、それぞれに適した方法で高精度の降水量算出を可能とする。
【解決手段】垂直、水平偏波によるレーダ波の同時送受信によって二重偏波観測を行い、観測パラメータとしてレーダ反射因子(Z)、差分レーダ反射因子(ZDR)、比偏波間位相差(KDP)、偏波間相関係数(ρHV)を作成する。降雨算出時には、ρHV値から降水粒子のカテゴリーが雨かそれ以外かを判定し(S1)、「雨」と判定された場合、KDPにより低い空間分解能で降水量を算出した後(S2)、Zを併用して高分解能の降水量を算出する(S3)。S1で「雨以外」と判定された場合、Z、ZDR、KDP、ρHVから「雪」、「あられ」、「融解層」を判定する(S4)。判定されたカテゴリー毎に用意した降雨算出パラメータB、βにより、降水量を算出する(S5)。最終的に、S3で算出した降水量とS4のカテゴリー別降水量を合算する(S6)。
(もっと読む)
気象レーダシステムとその降水強度算出方法
【課題】これまでは不可能であった高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を同時に送信し、その反射波を受信する送受信装置(11〜16)と、前記送受信装置の受信出力から二重偏波観測を行って複数の観測パラメータを算出する信号処理装置(17)と、前記複数の観測パラメータのうち、低空間分解能であるが降水強度との相関が高い性質を持つ観測パラメータと空間分解能が高いが降水強度との相関が低い観測パラメータそれぞれに基づいて降水強度を総合判断するデータ変換装置(18)とを備え、低空間分解能であるが降水強度との相関が高い性質を持つ比偏波間位相差(KDP)と、空間分解能が高いが降水強度の絶対値との相関は低く、その地点付近の相対的な値となるレーダ反射因子(Z)とを組み合わせて総合的に降水強度(R)を算出する。
(もっと読む)
複合機能レーダ装置
【課題】目標物体までの距離と目標物体の温度とを共に高い精度で測定できる複合機能レーダ装置を提供する。
【解決手段】高周波信号発生部8から出力される送信信号は、送信間欠停止スイッチ11で間欠停止しながら、送信信号増幅部12で増幅され、サーキュレータ部2を経由して目標物体13に放射される。送受信アンテナ部2には、送信信号が放射されている間、目標物体13からの反射波が受信信号として入力され、送信信号が放射されていない間、目標物体13からの輻射波が受信信号として入力される。受信信号は、サーキュレータ部2を経由して、受信信号増幅部3で増幅され、周波数変換部4で高周波信号分岐部10から分岐された送信信号と混合されてビート信号を発生する。信号処理部6は、ビート信号増幅部5で増幅されたビート信号に基づいて、目標物体13までの距離及び目標物体13の温度を求める。
(もっと読む)
電波センサ
【課題】センサ前方に存在する被検知体の有無や移動状態を精度良く検出する、電波ビームの放射方向を制御しS/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】送信信号を生成する発振回路9と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極2と、他方の表面に形成された、送信信号を電波ビームとして前方に放射する少なくとも1つの矩形状の送信電極3と、送信電極3a、3bから放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する伝送線路にて相互に接続された矩形状の受信電極4a、4bと、何れか一方の端子が接地電極2のみに接続され、受信電極4a、4bにて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6とを備え、検波素子5の他方の端子と出力線路6は受信電極4bの異なる位置に各々、接続される。
(もっと読む)
受信装置、移動角度推定方法、プログラム、および無線通信システム
【課題】受信装置、移動角度推定方法、プログラム、および無線通信システムを提供すること。
【解決手段】複数のアンテナと、前記複数のアンテナ間での受信信号の位相差を算出する位相差算出部と、前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部と、前記差分算出部により算出された位相差の差分から送信装置の移動角度を推定する移動角推定部と、を備える受信装置。
(もっと読む)
電波センサ
【課題】電波ビームの放射方向を制御しS/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】送信信号を生成する発振回路と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極と、他方の表面に形成された、送信信号を電波ビームとして前方に放射する矩形状の少なくとも一対の送信電極3a〜3dと、送信電極3a〜3dから放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の受信電極4と、何れか一方の端子が接地電極のみに、他方の端子が受信電極4に各々接続され、受信電極4にて受信した受信信号を検波する検波素子とを備え、一対の送信電極3a〜3dは受信電極4に対して対称で、且つ一対の送信電極3a〜3dの各中心点を結ぶ直線の中心と受信電極4の中心点が一致する位置に、受信電極4を配置する。
(もっと読む)
レーダ装置及び物標検出方法
【課題】静止物のピーク信号の裾野に埋もれてしまう物標に対応するピーク信号を検出することを可能とするレーダ装置及び物標検出方法を提供することを目的とする。
【解決手段】送信波と受信波を利用して第1のビートにおける複数の第1ピーク信号及び第2のビートにおける複数の第2ピーク信号を検出するピーク検出手段(32)と、複数の第2ピーク信号のグループ化を行って第2のビートにおけるグループ信号を得るグループ化手段(33)と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から検索する検索手段(34)と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から分離する分離手段(35)を有することを特徴とするレーダ装置(10)。
(もっと読む)
検出装置および鉄道車両
【課題】移動体の位置情報を低コストで検出することができる技術を提供する。
【解決手段】鉄道やエレベータかご等の移動体の位置情報を、電磁波の反射強度変化を利用して検出する。第1電波を放射する電波送信機SNDと、放射された第1電波からそれぞれの絶対位置において固有の反射強度およびその時間変化のパターンを生成する位置マーカーMKと、位置マーカーMKにより反射された第2電波を受信し、位置情報を取り出すための信号形式に変換し出力する電波受信機RCVと、電波受信機RCVの出力から位置を求めるマーカー認識装置LCCから構成される。これにより、設備コスト・メンテナンスコストの削減、1センチメートル以下の分解能での高精度な位置特定、車輪の空転・滑走に影響を受けない高信頼な位置特定が可能となる。
(もっと読む)
画像レーダ装置
【課題】目標の相対運動と3次元形状を推定することのできる画像レーダ装置を得る。
【解決手段】目標に対して送信電波を照射するための送信機1及び送受信アンテナ3と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用補助アンテナ4,5および受信機6〜8と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部9と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段11とを備える。
(もっと読む)
推定装置
【課題】前方車両の形状及び運動状態を正確に推定する。
【解決手段】推定装置は、レーダ波によって、前方車両表面の複数地点の位置座標を計測し(S110)、この複数地点を単一線分及び二線分で近似する(S120,S1300)。そして、各線分毎に、求めた線分長さ及び近似誤差に基づき、線分が車両前後面、側面を近似した線分である事前確率を算出する(S1400)。一方、過去において推定された前方車両の位置、向き、速さ、進行方向及び角速度の情報を基に、尤度を算出する(S1500)。そしてベイズ推定により、既に求めた事前確率と尤度とから、各線分毎に、線分が車両前後面、側面を近似した線分である事後確率を算出し(S1600)、前方車両のサイズ、位置及び向きを推定する(S1700)。また、これらの情報を基に、アンセンテッドカルマンフィルタにより、車両の速さ、進行方向及び角速度も合わせて推定する(S1800)。
(もっと読む)
波数推定装置
【課題】精度よくメインビーム内の到来波数を推定することができるようにする。
【解決手段】メインビーム方向から到来する到来波信号が存在するメインビーム部分空間を特定して、そのメインビーム部分空間を張る基底ベクトルを算出するメインビーム部分空間特定部12と、その基底ベクトルを用いて、妨害波抑圧部9により妨害波が抑圧されたベースバンド信号に対するビーム空間処理を実施するビーム空間処理部13とを設け、メインビーム内波数推定部14がビーム空間処理部13によるビーム空間処理後のベースバンド信号とメインビーム部分空間特定部12により算出された基底ベクトルから、メインビーム内の到来波数を推定する。
(もっと読む)
鋳型中のスラグ及び溶融金属の表面をモニタリングする方法及び装置
本発明は、レーダ装置を使用して連続式鋳造装置の鋳型中にあるスラグ及び溶融金属の表面をモニタリングする方法に関する。本発明により、レーダ装置は、少なくとも20 GHzの帯域幅を有する電磁波のビームを放射する。本発明は、この方法を使用するための装置にも関する。 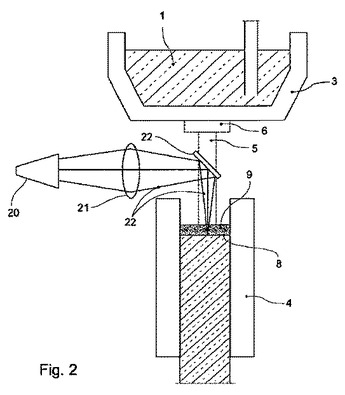 (もっと読む)
(もっと読む)
車載用レーダ装置
【課題】 間違った目標捕捉(乗り移り)の発生を回避できる車載用レーダ装置を提供する。
【解決手段】 自車(10)前方にパルス状の電磁波(12)を周期的に照射し、その反射波(13)に基づいて、少なくとも目標の水平方向の幅を測定する車載用レーダ装置(11)において、前記反射波の先回または数回前の強さと今回の強さとを比較する比較手段(17)と、今回の反射波の強さが急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに間違った目標であると判定する第1判定手段(17)とを備える。または、今回の反射波の強さが急増大したときに間違った目標であると判定する第2判定手段(17)を備える。
(もっと読む)
1 - 20 / 52
[ Back to top ]