
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
401 - 420 / 1,037
車両の接触回避支援装置

【課題】障害物の周囲に道路構造物などの多くの物体が存在するときも、それらと区別して障害物を早期に認識して迅速に回避するようにした車両の接触回避支援装置を提供する。
【解決手段】自車の周囲に存在する物体からの反射波が連続してm回あるいは通算してn回受信したとき、その物体を検出する物体検出手段(レーダ装置)と、自車の運動状態を検出して自車の進路を予測すると共に、進路上に物体が存在するとき、障害物と認識して自車との接触の可能性を判定し、t回接触の可能性があると判定される場合、物体との接触回避を支援する接触回避支援動作を実行する接触可能性判定手段を備えた車両の接触回避支援装置において、障害物の認識が困難な環境か否か判定し(S100)、肯定されるとき、m,n,tを減少補正して物体検出手段と接触可能性判定手段の応答性を向上させる(S102)。
(もっと読む)
物体速度検出装置

【課題】 対象物の移動速度を高精度に求めることができる物体速度検出装置を提供する。
【解決手段】 物体速度検出装置は、まずミリ波レーダの計測データから得られた相手車の位置情報について、αβフィルタを用いた位置微分を行って、相手車の車速を算出し(手順S104)、更にその車速に対して相手車予測軌道による速度上下限カットフィルタをかけることで、相手車の速度下限値及び速度上限値を決定する(手順S105)。また、物体速度検出装置は、相手車の位置情報に基づいた相手車の車速とは別に、ミリ波レーダの計測データから得られた自車と相手車との相対速度情報に基づいた相手車の速度を算出する(手順S106)。そして、物体速度検出装置は、位置情報から得られた相手車の車速と相対速度情報から得られた相手車の車速とを組み合わせて、最終的な相手車の車速を求める(手順S107)。
(もっと読む)
レーダ装置
【課題】
高誘電率ブロックの共振器を用いる方法では、マイクロストリップ線路に高誘電率ブロックを結合させて共振器を構成する方法が良く用いられるが、最適な発振条件を得るためには、マイクロストリップ線路と高誘電率ブロックの相対位置を調整する必要がある。PLL回路を構成する方法は、構成する部品数が多くなるため、コスト高になるとともに、部品面積が大きくなり小型化が難しくなる。
【解決手段】
本レーダ装置は、送信波を発生する発振器と、発振器から伝播された送信波と、当該送信波が物体に反射して戻ってきた受信波を混合するミキサを備え、発振器は、遅延回路を介して、ミキサに送信波を伝播する。遅延回路の遅延量が可変制御可能でもよい。又、遅延回路を介さずにミキサへ送信波を伝播する経路を備えてもよい。
(もっと読む)
走行制御システム
【課題】先行車を捕捉して車間距離を計測するレーダ装置と、その車間距離を目標値と一致させるべく追従制御を行う手段と、を備える走行制御システムにおいて、何らかの原因により、先行車を捕捉できなくなることがあるので、追従制御を不必要に解除するのを避けつつ、自車の車線変更時に十分な加速性を確保できるようにする。
【解決手段】先行車を捕捉できなくなるとその直前の計測データに基づいて追従制御を続行しつつ、先行車を捕捉できなくなってから所定時間の間、先行車を捕捉できない場合に先行車を見失ったと判定する手段(図1のS1→S4→図2のS11〜S14→図2のS2〜S3→図3のS11およびS12→S15)、自車の車線変更を検出すると先行車を捕捉できなくなったときの計測データに基づく追従制御を停止して設定車速を目標とする定速制御を開始する手段(図1のS1→S4→図2のS11〜S14→図2のS2〜S3→図3のS11〜S13→S15)と、を備える。
(もっと読む)
レ−ダ装置
【課題】レーダ装置において、所定間隔離間した送信アンテナ対に送信信号を伝送する伝送経路対や、伝送経路対に送信信号を分配するスイッチを備えた構成であっても、探知性能の低下を防止する。
【解決手段】レーダ装置は、前記所定周波数より低い周波数のレ−ダ信号を出力する発振器と、前記発振器が出力するレ−ダ信号を、送信アンテナ対への伝送経路対に分配するスイッチと、伝送経路対にそれぞれ接続され、前記レ−ダ信号の周波数を前記所定周波数に変換してから送信アンテナ対に出力する逓倍器対を有するので、スイッチや伝送経路を通過する送信信号の周波数を小さくすることで、スイッチの挿入損失や伝送経路の伝送損失を抑えることができ、送信信号の強度低下による探知性能低下を防止できる。
(もっと読む)
受信機ネットワークを用いた複数の物体の位置特定
送信機によって放出され、物体によって複数の受信機に反射される信号を処理することによって複数の物体の正しいロケーションを求めるための技法を説明する。角度情報も高度情報も使用されない。物体−受信機対の到達時間差測定値を作成して、各物体から各受信機−受信機対において受信された信号間の到達時間差を計算する。次に、双曲線の位置特定を実施して、物体毎の可能なロケーションを識別する。受信機−物体対毎に直接・反射信号受信時間測定値を作成して、送信機からの直接信号の受信機による受信と、物体によって反射された信号の受信機による受信との時間差を計算する。直接・反射信号受信時間測定値は、物体−受信機対の到達時間差測定値に関連付けられ、その結果を使用して、双曲線の位置特定によって求められたロケーションを直接・反射信号受信時間測定値に関連付けることによって、正しい物体位置を識別する。 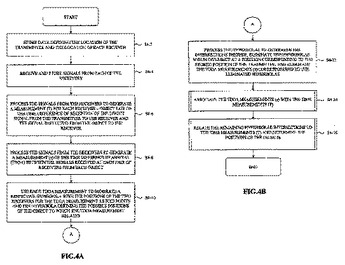 (もっと読む)
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】過去の相関行列を単独使用し、簡易演算により高い精度で受信波の到来方向検出を行う電子走査型レーダ装置を提供する。
【解決手段】本発明の電子走査型レーダ装置は送信波を送信する送信部と、ターゲットからの反射波を受信する受信部と、送信波・反射波からビート信号を生成するビート信号生成部と、ビート信号を周波数分解して複素数データを求める周波数分解処理部と、ビート周波数の強度値からターゲットを検知するターゲット検知部と、ターゲットが検出されたビート周波数の複素数データから相関行列を求める相関行列算出部と、現在及び過去検知サイクルのターゲットを距離・相対速度で関連付けるターゲット連結処理部と、現検知サイクルのターゲットの相関行列と、関連する過去検知サイクルのターゲットの相関行列とを重付け平均した平均相関行列を生成する相関行列フィルタ部と、平均相関行列から受信波の到来方向を求める方位検出部とを有する。
(もっと読む)
物体検知装置
【課題】物体の二次元の位置情報が得られる物体検知装置を提供する。
【解決手段】伝搬速度が異なる複数の信号を伝搬する出射用線状アンテナと入射用アンテナを対象空間Pの一辺に布設し、対象空間P中に複数箇所設定された各被検出点における電波の反射係数を複数の受信信号とあらかじめ知られた各被検出点における電波の結合損失とから算出する。
(もっと読む)
車載レーダ装置の被覆構造
【課題】レーダ装置の性能低下を抑えつつレーダ装置を車両外板に対して斜めに設置する。
【解決手段】車載レーダ装置の被覆構造は、車両に搭載されるレーダ装置と、当該レーダ装置よりも車両の外側に配置される車両外板とを備える。レーダ装置は、ビーム軸が車両外板に垂直な線に対して10°以上42°以下、より好ましくは、10°以上35°以下の角度となるように取り付けられる。これにより、レーダ装置の角度検出性能および電波透過減衰性能の低下を抑えて、レーダ装置を車両および車両外板に対して斜めに設置することができる。
(もっと読む)
レーダ装置
【課題】目標までの距離に応じて最適な距離分解能・相対速度分解能を設定可能なレーダ装置を提供する。
【解決手段】周波数変調すると共にパルス化した電波を送受信して目標203までの距離と相対速度を求めるFMパルス方式のレーダ装置において、送信タイミングから一定時間毎にサンプリングタイミングを定めるレンジゲート手段205と、レンジゲート毎に、周波数上昇区間あるいは周波数下降区間においてサンプリングを行うサンプリング手段206と、サンプリング手段206で得られたサンプリングデータをもとに、フーリエ変換の入力として用いる計測用データを設定し、計測用データの初めから終わりまでのサンプリングに要した時間を計測時間とした時、レンジゲート毎に計測時間を変更する計測時間変更手段207を備える。
(もっと読む)
ソーラー電池式移動障害物遠隔感知機
【課題】
従来から山間部やビルの間での視界不良のカーブや交差点で、反対側から来る車などの移動物の早期発見が困難であった。これは電源がないのと、レーダーやセンサの応用がなされていなかった為で、これらを可能とした装置を提供するものである。
【解決手段】
電源にソーラー電池を利用、主柱パイプにレーダー及センサを装着、それに点滅ライトを連結させ、移動する障害物をレーダーとセンサが感知し、自動的に必要な方向のライトを点灯、更に自動的にLED文字板の文字を表示、大型設置工事を必要とする事なく、種類も目的に応じ置床用か壁掛用かを選定して使用でき、設置も容易な構造を特徴とする、ソーラー電池式移動障害物遠隔感知機が完成できた。
(もっと読む)
レーダ装置及びターゲットの方位角計測方法
【課題】レーダの検出視野内に相対速度が同一となる複数の物体が存在する場合でも、ターゲットの位置を精度良く求めることが可能なレーダ装置を提供する。
【解決手段】同じアンテナが僅かに異なる場所(T1)に位置していたときの過去のデータと、現在(T1+ΔT)の位置におけるデータとを単位のデータセットとして使用し受信信号の強度変化を求めることで、仮想的にアンテナ数をレーダの移動方向に沿って増やすのと類似の効果を得る信号処理を用いる。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段2で今回検出された検出点をグルーピングするグルーピング手段3と、前回の複数のグループに基づいてグルーピング手段3で今回グルーピングされたグループを複数のグループに分割する分割手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
FMCWレーダ装置
【課題】レーダの送信信号に三角波状の周波数変調を行い、送受信信号から抽出されたUP周波数とDOWN周波数のペアリング処理を行うことにより、目標ターゲットの距離、速度等を計算するための技術に関し、複数の移動対象物体が存在した場合における、複数のUP周波数とDOWN周波数のミスペアリングをなくすことにある。
【解決手段】速度全組合せ算出部111は、検出された複数のUP周波数と複数のDOWN周波数の全組合せに対応する速度値を算出する。速度出現頻度算出部112は、上記全組合せに対応する速度値について、その出現頻度を集計算出する。UP/DOWN周波数ペアリング部113は、上記出現頻度に基づいて、UP周波数とDOWN周波数の適切なペアを決定する。この場合、各組合せに対応する速度値又は距離値が所定の閾値を超えるものについては、ペアから除外される。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段で今回検出された各検出点をグルーピングするグルーピング手段3と、前回のグループに基づいてグルーピング手段3で今回グルーピングされた複数のグループを統合する統合手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段2で検出された各検出点の位置におけるレーダ検出手段2の距離分解能に応じてグルーピングの閾値を設定する閾値設定手段3と、レーダ検出手段2で検出された各検出点を閾値設定手段3で設定された閾値に基づいてグルーピングするグルーピング手段3と、グルーピング手段3でグルーピングされたグループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
車両の障害物検知装置
【課題】車両前方の物体が障害物であるか否かを早期に且つ的確に判定する。
【解決手段】物体検出センサ4が車両1に対する物体の位置情報を検出する度に、その位置情報をECU5が逐次記憶する。物体検出センサ4が物体を検知すると、ECU5は、車速センサ2が検出した車速及び回転角速度センサ3が検出したヨーレイトから車両1の予想進路を推定するとともに、その物体の過去の位置情報が記憶されているか否かを判定し、物体の過去の位置情報が記憶されていると判定した場合、過去の位置情報が示す物体の過去の位置と推定した予想進路とに基づいて、物体が車両1と衝突する可能性がある障害物であるか否かを判定する。
(もっと読む)
車載レーダ装置及び車載レーダ管制システム
【課題】他のレーダ装置との干渉を確実に避けるように一定の規則に従って観測信号の送信制御を行う車載レーダ装置を提供する。
【解決手段】所定の周波数帯域で観測信号を送受信する送受信部と,前記周波数帯域内の周波数で優先順位の信号を送信する優先順位送信部とを備えた車載レーダ装置において,前記送受信部は他の車載レーダ装置の優先順位の信号を受信し,他の車載レーダ装置の信号との干渉が検知された場合は,当該他装置の優先順位と前記自装置の優先順位とに基づき,前記送受信部が送信する観測信号の周波数帯域を所定の周波数分ずらす。
(もっと読む)
車両の障害物検知装置
【課題】車両の進行方向前上方や前下方に存在する物体が障害物であるか否かを的確に判定する。
【解決手段】ECU5は、RAMに記憶された前回の位置情報のうち今回の検出時に関連付けが行われなかった未検知物体に対し、推定位置を補間してその位置情報を当該未検知物体の前回の位置情報に関連付けて記憶する。ECU5は、予想進路を推定し、各物体にそれぞれ関連付けて記憶された位置情報と推定した予想進路とに基づいて、物体が車両1と衝突する可能性がある障害物であるか否かを判定する。ECU5は、同一の物体に対して実行した補間の回数を計数し、計数した補間回数に基づいて、当該物体に対する補間処理が有効であるか否かを判定する。ECU5は、補間処理が有効ではないと判定した物体を障害物ではないと判定する。
(もっと読む)
ミリ波レーダ用リフレクタ
【課題】雨や雪による反射率の変動が少ないミリ波レーダ用リフレクタ装置を提供する。
【解決手段】ミリ波レーダ用リフレクタ3は、ベース部16を有するポール15と、リフレクタ10と、リフレクタ固定ネジ12によってリフレクタ10が支持部11に固定され、リフレクタ10が支持される支持部11と、支持部11をポール15に固定する固定具13と、固定具13をポールに固定するための固定ネジ14と、を有し、また、リフレクタの材質としては、アルミ材やステンレス材等を用い、表面をテフロン(登録商標)加工、酸化チタン塗布、ウレタン塗装などで雨や雪の付着を防止すると共に、雨や雪が付着しにくいようにリフレクタ10を単純なリング形状とし、空隙を設ける。
(もっと読む)
401 - 420 / 1,037
[ Back to top ]