
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
321 - 340 / 1,037
レーダ装置
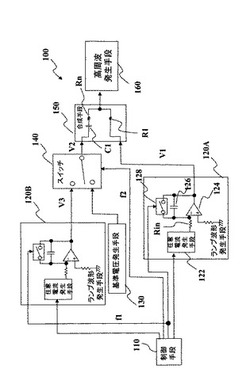
【課題】相対速度が0の物体があった場合でも、検出できるとともに、測定誤差を低減できるレーダ装置を提供することにある。
【解決手段】ランプ波形発生手段120A,120Bは、時間と共にその出力電圧が変化するランプ電圧を発生する。ランプ波形発生手段は、任意電流を発生する任意電流発生手段122と、任意電流発生手段が出力する電流を積分してランプ電圧を発生する積分手段124,126とを備える。スイッチ手段140は、ランプ波形発生手段120Bの出力と基準電圧とを交互に切り替えて出力する。合成手段150は、ランプ波形発生手段120Aの出力と、スイッチ手段140の出力とを合成する。高周波発生手段は、合成手段150の出力電圧を周波数信号に変換し、高周波信号を出力する。制御手段11は、任意電流発生手段122及びスイッチ手段140を制御する。
(もっと読む)
方位検出装置、レーダ装置

【課題】受信アンテナの面積の増加を可能な限り抑制しつつ、通常検知エリアでの方位検出に加えて、より広い角度範囲内にて、物標が存在している方位を検出可能な方位検出装置、及びその方位検出装置を用いたレーダ装置の提供。
【解決手段】物標検出処理では、第二間隔で受信アンテナが配置されたアレイアンテナからの受信信号群に基づいて、遠距離エリア内に存在している同一物標からの反射波に基づく周波数ピークの組合せを抽出して、仮物標を認識する(S170)。そして、第二間隔よりも狭い第三間隔で配置された設定アンテナ素子、及び特定アンテナ素子それぞれからの受信信号に基づいて、広角エリア内に存在している同一物標からの反射波に基づく周波数ピークの組合せを抽出して、仮物標を認識する(S180)。その後、確定物標を特定し(S200)、その確定物標についての物標情報を走行支援ECU10に送信する(S210)。
(もっと読む)
アンテナ装置とそれを用いた電子機器
【課題】
本発明は、例えば自動車(電子機器)などに装着され使用されるアンテナ装置とそれを用いた電子機器に関するものであり、小型化を図るとともに位置検出精度を高めることを目的とする物である。
【解決手段】
そしてこの目的を達成するために本発明は、前面側において、所定間隔をおいて設置された第1、第2の送受信開口11a,11bを有するアンテナ体7と、このアンテナ体7の後方において、導波路体8を介して設けた送受信体9を備え、前記導波路体8は、前記アンテナ体7の第1、第2の送受信開口11a,11bに対する導波路長を可変する構成とした。また、前記可動導波路10の固定導波路12、36と対向する面に、固定導波路12、36に向けて突出するほぼλ/4の複数の突起44を設け、この突起44を一構成要件とする位置検出手段を設けた。
(もっと読む)
車両周辺監視装置
【課題】 車両から遠くにある物体を感度良く検出しつつ、検出不要な物体を区別することができる「車両周辺監視装置」を提供する。
【解決手段】 周辺車両検出装置10は、送信波発生部20、送信信号に基づき超音波を送信しかつその反射波を受信する超音波センサ30、超音波センサ30で受信した信号を検波する受信検波部40、検波結果に基づき反射波の受信信号を検出する反射波検出部50、反射波の受信信号を増幅する反射波増幅部60、反射波増幅部60で増幅された信号を用いて警告等を発する警告部70、反射波検出部50の検出レベルを設定する検出レベル設定部80とを含む。
検出レベル設定部80は、車両から物体までの距離が遠ざかるにつれて検出レベルが小さくなるような負の傾きを持つ関数として設定する。
(もっと読む)
方位検出装置、レーダ装置
【課題】受信アンテナの面積を増大させること無く、通常検知エリアに加えて、より広い角度範囲にて、物標が存在している方位を検出可能な方位検出装置、及びその方位検出装置を用いたレーダ装置の提供。
【解決手段】物標検出処理では、第一間隔で配置されたアンテナ素子からの受信信号それぞれをFFTしてパワースペクトルを求め(S160)、さらに、そのFFTした結果(パワースペクトル)に対して処理を加えることで、第一間隔よりも広い第二間隔で配置されたアンテナ素子からの受信信号それぞれをFFTした結果に相当する特定スペクトルを求める(S170)。そして、特定スペクトル、及びパワースペクトルそれぞれから、予め規定された条件に従って、同一物標からの反射波に基づく周波数ピークの組合せを抽出し、その周波数ピークの組合せを仮物標として認識し、仮物標毎に物標情報を生成する(S170,S180)。
(もっと読む)
レーダ装置
【課題】複雑な処理をせずとも、互いに略等しい相対距離に存在する対象物の数を検出することのできるレーダ装置を提供する。
【解決手段】画像処理部10は、放射された電磁波が、カメラ101によって撮像された画像に撮像されている他車両で反射した反射波を受信するまでの受信時間を算出する。さらに、画像処理部10は他車両との相対距離を算出し、算出した相対距離と略同じ相対距離に存在する他車両の数を計数し、計数した数と算出した受信時間とを対応づける。レーダ処理部11は、放射された電磁波と反射波との相関を演算しながら、相関がピーク値を生じたときの反射波の受信時間と画像処理部10によって算出された受信時間とを比較して、略等しい受信時間に対応づけられた他車両の数を特定する。レーダ処理部11は、ピーク値を生じた相関の受信時間に基づき相対距離を算出し、特定した他車両の数を対応づける。
(もっと読む)
障害物検出装置および障害物検出システム
【課題】自車両との衝突危険度が適切に判断できるターゲット選択を行って演算負荷や通信負荷を低減することができる障害物検出装置および障害物検出システムを提供する。
【解決手段】車両の斜め方向から相対的に接近する物体を検出し、車両に対して、検出した物体の相対距離および相対速度を少なくとも算出する。そして、物体の相対距離および相対速度を用いて、当該物体が車両に衝突するまでの衝突予測時間を算出して、衝突予測時間が短い順に予め決められた数の物体を選出し、選出された物体に関する検出情報を出力する。
(もっと読む)
レーダ装置
【課題】温度・経年変化に起因する位相・振幅変化による影響をなくせるDBF方式のレーダ装置を提供する。
【解決手段】信号処理手段101は、切替手段50を分配器7側に閉じた時に得られるチャネル毎の送信信号の位相・振幅を検出する位相・振幅検出手段60と、該検出手段60が検出するデータを記憶する記憶手段70と、前記検出手段60のデータ検出期間を制御する検出期間制御手段121と、該制御手段121により設定された期間で検出された新たなデータと記憶手段70に記憶されたデータとの変化分を求める差分値検出手段80と、該検出手段80により求められた変化分を次の変化分検出期間まで記憶する記憶手段90と、記憶手段70および90に記憶されている位相・振幅データに基づいて、受信系統毎の位相、振幅誤差を補正する受信データ信号処理手段111を有する。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】周波数成分を平滑化してピーク周波数を求め、各ビート信号におけるピーク周波数のビート信号を用いて方位角を検出する場合に、誤検出を防止する。
【解決手段】 ピーク周波数検出手段が、ビート信号群の周波数成分を平滑化したときに極大値が形成されるピーク周波数を検出し、ビート信号抽出手段が、前記ビート信号群から、前記ピーク周波数を含むピーク周波数帯域における周波数成分の状態が所定の条件を満たすビート信号を抽出し、方位角検出手段が、前記抽出された抽出ビート信号のうち、第1の抽出ビート信号に含まれる前記ピーク周波数のビート信号と、第2の抽出ビート信号に含まれる前記ピーク周波数のビート信号との位相差に対応する方位角を検出するので、同一物体から得られたビート信号を用いて方位角検出ができる。よって、誤検出を防止できる。
(もっと読む)
物体検出装置
【課題】反射波信号のサンプリング時間が長い場合であっても、物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、ADコンバータ221から出力されるサンプリング時間ΔT毎の反射波信号を取得する受信信号取得部12と、周囲の物体の画像を撮像するステレオカメラ23を介して、物体との相対速度ΔVを検出する検出部13と、検出部13によって検出された相対速度ΔVから反射波のパルス間隔を求める間隔算出部15と、受信信号取得部12によって取得された反射波信号及び間隔算出部15によって求められたパルス間隔に基づいて、反射波の波形を求める波形算出部16と、求められた反射波の送信波に対する遅延時間を求める遅延時間算出部17と、求められた遅延時間に基づいて、物体との距離を求める距離算出部18と、を備える、
(もっと読む)
推定装置
【課題】前方車両の形状及び運動状態を正確に推定する。
【解決手段】推定装置は、レーダ波によって、前方車両表面の複数地点の位置座標を計測し(S110)、この複数地点を単一線分及び二線分で近似する(S120,S1300)。そして、各線分毎に、求めた線分長さ及び近似誤差に基づき、線分が車両前後面、側面を近似した線分である事前確率を算出する(S1400)。一方、過去において推定された前方車両の位置、向き、速さ、進行方向及び角速度の情報を基に、尤度を算出する(S1500)。そしてベイズ推定により、既に求めた事前確率と尤度とから、各線分毎に、線分が車両前後面、側面を近似した線分である事後確率を算出し(S1600)、前方車両のサイズ、位置及び向きを推定する(S1700)。また、これらの情報を基に、アンセンテッドカルマンフィルタにより、車両の速さ、進行方向及び角速度も合わせて推定する(S1800)。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、物体が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、反射強度のピークが3つ以上存在する場合、反射強度の高い順に、上位3つのピークを抽出する。これら3つのピークのうち、両端の2つのピークと、これら2つのピーク間の窪みのうち、最低強度に基づいて、前記対象物が車両であるか否かを判定する。また、ピークの強度に対して窪みの強度がある程度落ち込んでいる場合に停止車両であると判定する。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、対象物が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、窪みの強度の所定倍(例えば0.5倍)となる基準強度を算出し、左右端ピークから物体端部(左右端ピークの左脇および右脇)に向かって、この基準強度に相当する走査方向(左側基準方向および右側基準方向)を求め、これらの基準方向間の幅(広がり幅Ws)が車両と判定できる所定幅(例えばWs_max=5.0[m])に収まっている場合、車両らしいとして判定する。
(もっと読む)
物体検出装置
【課題】停止車両を、路面標示や路面に埋め込まれた反射物等の路面設置物と、区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、水平方向、および垂直方向にレーザ光を走査し、自車両前方に存在する物体を検出する。また、制御部2は、検出物体について、(a)停止物体である、(b)自車両からの距離が予め定めた路面設置物判定距離D1よりも短い、(c)前回の下走査で得られた反射波の強度が、前回の上走査で得られた反射波の強度の路面設置物判定係数倍(×α1)よりも大きい、および、(d)前回の下走査で得られた反射波の強度が、今回の基準走査で得られた反射波の強度よりも大きい、という、4つの条件が全て成立したときに、その検出物体を自車両の走行を妨げない路面設置物であると判定する。
(もっと読む)
車両傾斜検知装置
【課題】温度変化や風や騒音があっても傾斜角度を精度よく検知することができる車両傾斜検知装置を得ることを目的とする。また、受信信号レベルの偏位があっても傾斜角度を精度よく検知することができる車両傾斜検知装置を得ることを目的とする。
【解決手段】車両に設置され、所定の周波数、振幅、位相を持つ送信信号を送信アンテナから電波にして放射する送信手段と、地面で反射した電波を2つの受信アンテナで受信し第1の受信信号と第2の受信信号として取り出し送信手段からの送信信号と第1の受信信号で直交検波して得た信号から第1の振幅値と第1の位相値を算出し送信手段からの送信信号と第2の受信信号で直交検波して得た信号から第2の振幅値と第2の位相値を算出する受信手段と、算出された振幅値と位相値に基づいて車両の地面に対する傾斜角度を算出する傾斜角度演算手段を備えたことを特徴とする車両傾斜検知装置。
(もっと読む)
レーダ送受信機、及びレーダ装置
【課題】最小限の構成で、送受信信号の周波数差信号をサンプリングできるレーダ送受信機を提供する。
【解決手段】レーダ信号を送信信号として送信し、物体により反射された前記送信信号を受信信号として受信するアンテナ部と、前記送信信号と前記受信信号のいずれか一方をスイッチング周波数信号でスイッチングするスイッチング手段と、前記レーダ信号と前記受信信号の第1の周波数差信号を生成するミキサと、前記スイッチング周波数と同期して前記第1の周波数差信号のサンプリングを行い、前記レーダ信号と受信信号の第2の周波数差信号を検出するサンプリング部とを有するレーダ送受信機によれば、第1の周波数差信号から第2の周波数差信号を直接サンプリングできるので、第1の周波数差信号とスイッチング周波数信号との周波数差信号を生成するミキサ等を省略できる。
(もっと読む)
車両用外界認識装置、および、車両システム
【課題】複数の物体が互いに近接している場合でも、これらの物体を高精度で個体認識すること。
【解決手段】車両用外界認識装置100の衝突判定部4は、物体群の左端位置、中心位置、右端位置それぞれについて、両端横速度計算部3で計算される各位置における各横速度をもとに、相対座標系における物体群の移動軌跡を計算し、その移動軌跡が相対座標系における原点に近づくほど各位置における危険度が高いものとして、各位置における危険度を計算し、衝突回避制御部5は、衝突判定部4により計算される物体群の各位置における危険度のうち、少なくとも1つの位置における危険度が所定しきい値を超えるときに、その危険度に対応する物体群に関する衝突回避制御を実行する。
(もっと読む)
レーダ装置
【課題】他車両の数に応じて符号信号の符号長さを調節することのできるレーダ装置を提供する。
【解決手段】カメラで自車両の走行方向を撮像した画像を画像処理することにより他車両の数を計数し、計数した数に基づいて符号信号の符号長さと次数を決定する。決定した符号長さと次数で生成した符号信号を電磁波として空間に放射し、当該符号信号と受信部によって受信された信号との相関を演算することにより、他車両との相対距離などを対象物の情報として算出する。
(もっと読む)
表面処理材、レーダユニット、表面処理材製造方法
【課題】適用される金属粒子の材質に関わらず、当該金属粒子による金属調の表面を維持し、かつ通過する電磁波に影響を与えることを回避する。
【解決手段】視覚的に金属調の見栄えが必要な部材であり、かつ電磁波を通過させる必要がある場合に、金属調を出すために基材12に形成される金属微粒子14を予め透明絶縁材料16によってコーティングしておくことで、金属微粒子14同士が密集して形成されても、互いの電気的絶縁性が維持されるため、電子の移動が制限され、ミリ波の電磁波を確実に通過させることができる。また、密集度合いも大きく変わらないため、金属調としての見栄えも維持することができる。
(もっと読む)
車両の障害物検知装置
【課題】自車両の発進時に駆動輪が空転して自車両が走行できない状況を想定し、この状況下で、自車両前方の障害物が静止物であることを精度良く確実に判定できる、車両の障害物検知装置を提供する。
【解決手段】レーダユニット2により自車両Cに対して自車両前方の障害物の相対位置と相対速度とが検知され、その障害物検知情報に基づいて自車両Cの作動機器が制御されるが、更に、自車両Cの駆動輪の回転の有無と自車両Cの移動の有無が検知され、駆動輪の回転が検知された場合であって、自車両Cの移動が検知されない場合、検知された障害物の自車両に対する相対速度に変化がない障害物は静止物であると判定される。
(もっと読む)
321 - 340 / 1,037
[ Back to top ]