
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
301 - 320 / 1,037
レーダ装置

【課題】MUSIC法を用いた方位推定に際し、不等間隔アレーアンテナを採用することによって生じる非所望ピークの影響を抑え、高精度に物標方位を推定可能にすること。
【解決手段】レーダ装置は、受信信号に基づき自己相関行列を算出すると共に(S110)、当該行列の固有値を求め(S120)、閾値より大きい固有値の数から到来波数Mを推定する(S130)。また、各固有値に対応する固有ベクトルを用いて、MUSICスペクトルを算出し(S160)、MUSICスペクトルから、推定した到来波数Mより所定量α多い数のピークを抽出する。そして、各ピークに対応する方位を、検査対象方位に設定する(S170)。そして、検査対象方位のステアリングベクトル間の相関を、高低の二段階で判定し、相関が高い場合には、電力推定対象に設定する方位の数M’を、M+αに設定し、相関が低い場合には、数M’を、推定した到来波数Mに設定する。
(もっと読む)
物体検出装置

【課題】 レーダを用いた物体検出において、物体を精確に検出する物体検出装置10を提供する。
【解決手段】 本発明に係る物体検出装置10の物体検出部4は、レーダ検出部により得られた複数の検出点データから、一つの物体に対応する複数の検出点データをグルーピングするグルーピング手段22と、上下方向に異なる高さに設定された複数のレイヤの夫々について、グルーピング手段によりグルーピングされた検出点データのうち、当該レイヤ内にある検出点データの個数を算出するレイヤ包含点数算出手段24と、レイヤ包含点数算出手段により算出された検出点データの個数が最大となるレイヤを判定し、当該レイヤに属する検出点データを抽出する検出点抽出手段26と、を有する。
(もっと読む)
物体検出装置
【課題】物体との相対速度を正確に検出する。
【解決手段】物体検出ECU1は、2つ以上のパルス個数分のパルスを含み、予め設定されたパルス間隔のパルス群からなる送信波を送出するレーダ信号送信部21と、レーダ信号受信部22によって受信される反射波の波形の候補として、パルス間隔が相異なる2つ以上の第1所定個数の波形情報を予め格納する第1波形記憶部111と、第1波形記憶部111に格納された第1所定個数の各波形と、受信信号取得部102によって取得された反射波信号との相関値を求める第1相関値算出部112と、第1波形記憶部111に格納された第1所定個数の波形の中で、算出された相関値が最も大きい波形のパルス間隔を、反射波のパルス間隔として求める第1間隔判定部113と、求められたパルス間隔に基づいて、物体との相対速度を求める相対速度算出部115と、を備える。
(もっと読む)
先行車両の位置検出方法及び位置検出装置並びにデータフィルタリング方法
【課題】先行車両の位置データの算出精度を向上することができる位置検出方法及び位置検出装置を提供する。
【解決手段】自車両1に対する先行車両2の位置を検出する方法であって、車間距離情報riと横位置情報Li,Riからなる一次データセットを取得する工程と、一次データセットの車間距離情報riに対して線形回帰処理を行い、得られた線形回帰線との差が所定の閾値以下の車間距離情報riとこれに対応する横位置情報Li,Riとからなる二次データセットを取得する線形回帰処理工程と、この二次データセットの横位置情報Li,Riに対してクラスタリング処理を行い、最大のクラスタに含まれる横位置情報Li,Riとこれに対応する車間距離情報riとからなる三次データセットを取得するクラスタリング処理工程と、この三次データセットを用いて現在時刻t0における車間距離と横位置とを算出する位置情報算出工程とを備えた。
(もっと読む)
車両探索装置および車両探索方法
【課題】装置構成を簡略化し、かつ、発信源の方向の検知精度を向上させる。
【解決手段】車両探索装置10は、トリガー信号を発信可能な携帯端末11と、トリガー信号に対する応答信号を所定時間に亘って所定パターンで発信する車載装置12とを備え、携帯端末11は、応答信号の所定反射体(操作者の人体)での反射波を所定相対位置(操作者の所定正面位置)で受信するアンテナ21aと、反射波の受信強度および受信パターンを検出する受信強度検出部23と、応答信号の車両側識別情報と所定の端末側識別情報とを比較する識別情報比較部25と、車両側識別情報が端末側識別情報と一致した場合に、所定反射体の異なる配置方向毎での受信強度を操作者に報知する報知制御部28とを備える。
(もっと読む)
物体検出装置
【課題】 レーダを用いた物体検出において物体を正確に検出する物体検出装置を提供する。
【解決手段】 本発明に係る物体検出装置1の物体検出部4は、複数の検出点データから一つの物体に対応する複数の検出点データをグルーピングするグルーピング手段41と、グルーピング手段によりグルーピングされた検出点データに対応する画像部分から、検出対象物体の所定の一部分を探索して検出する部分探索手段42と、レーダ検出部から、部分探索手段により検出された一部分の両端へ延びる2本の直線を算出する直線算出手段43と、グルーピング手段によりグルーピングされた検出点データのうち、直線算出手段により算出された2本の直線よりも内側の検出点データを、検出対象物体の一部分に対応する検出点データとして抽出する検出点抽出手段44とを有する。
(もっと読む)
レーダ装置
【課題】FMCWレーダを初めとするCWレーダ方式を用いるレーダ装置において、干渉波の発生を回避し、制約された周波数変調帯域内に同時に多くのレーダ装置を収容可能とする。
【解決手段】周波数変調を伴う基準連続波に基づく送信波を空間に放射し、外部目標に反射されたこの送信波を受信して受信信号を取得するとともに、取得した受信信号と上記基準連続波からビート信号を求め、求めたビート信号から上記外部目標の距離及び速度を算出するレーダ装置1において、上記基準連続波を上記レーダ装置に特有の間隔でパルス化してパルス送信信号を生成するパルス生成手段13と、上記パルス送信信号を上記送信波として空間に放射するアンテナ16と、干渉波の発生を検出する干渉波モニタ19とを備え、パルス生成手段13は、干渉波モニタ19が検出した干渉波のパルス間隔と異なる間隔を上記特有の間隔に選択する。
(もっと読む)
個別認識装置及び個別認識システム
【課題】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置と個別認識システムを提供する。
【解決手段】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置であって、センシング中央にセットしてセンサ周囲の環境形状を測定するレーザーレンジファインダと、各物体に貼付されたICタグに記録された情報を蓄積したデータベースと、システム中心から各物体の距離を読み取れるICタグリーダと、レーザーレンジファインダで得た環境形状変化と、ICタグリーダで得たICタグ情報と、システム中心から前記各物体までの距離変化から、データベースに蓄積した情報を元に、各ICタグが添付された対象物情報、位置、移動ベクトルを算出し、各対象物の移動予測を行ない各対象物を認識する判別器から構成した個別認識装置及び個別認識システムである。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】他のレーダ測定装置が近傍に存在するような環境においても、混信による影響を低減できるようにする。
【解決手段】送信部11は、周波数切替部32を制御して1周期ずつランダムな周波数のCW信号を発生させることで、ランダムな間隔で切替信号を発生させ、2種類の周波数の電波を、切替信号に基づいて、交互に切替えて送信する。受信部12は、送信された送信信号としての2種類の周波数の電波のうち、反射されてくる2種類の周波数の電波を、切替信号に基づいて、切替ながら受信し、受信した2種類の周波数の電波より受信信号を生成する。衝突予備動作用信号処理部13は、受信信号を、所定時間の間でサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
物体検出装置
【課題】死角を減少させて、自車両の周辺のターゲットを、簡易な構成で検出することができる物体検出装置を提供する。
【解決手段】物体検出装置は、当該車両の外部に向けた第1の検出範囲内の物体を検出する第1レーダと、上記車両における上記第1レーダと異なる位置に搭載され、当該車両の外部に向けた第2の検出範囲内の物体を検出する第2レーダと、上記第1レーダの検出結果および上記第2レーダの検出結果に基づいて、検出された物体が上記車両に衝突する危険性を判断する判断手段とを備える。また、上記第1レーダおよび上記第2レーダは、当該第1の検出範囲の中心軸と当該第2の検出範囲の中心軸とが上記車両の外部でねじれるまたは交わる位置関係で上記車両に搭載される。
(もっと読む)
偏波レーダ装置
【課題】効率的な偏波レーダ装置を提供する。
【解決手段】垂直送信アンテナ16から送信する垂直偏波または水平送信アンテナ20から送信する水平偏波の中の一方を他方に比べて遅延させる。この遅延を対象物の位置の移動が無視できる範囲内とする。垂直受信アンテナ22、水平受信アンテナ24で受信され乗算器28,30で得られたビート信号が信号処理部34で周波数解析され、遅延情報に基づいてビート信号周波数が異なることを利用して4つの偏波成分が分離して取得される。
(もっと読む)
物体識別装置及び物体識別方法
【課題】歩行者等の人物が計測対象物であっても確実に計測対象物を検出して識別することができる物体識別装置を提供する。
【解決手段】物体識別装置は、電磁波発生器101及び送信器102を用いて送信されて計測対象物OBによって反射した電磁波を受信器103によって受信すると、その受信信号の波形に基づいて、計測対象物OBに電磁波の吸収物が含まれている旨を吸収物検出部107によって検出し、吸収物検出部107によって検出された吸収物を含む計測対象物OBの種類を皮膚判別部108によって判別する。
(もっと読む)
物体検出装置
【課題】自車両の挙動が変化した場合でも適切な画像処理領域を設定することができる物体検出装置を提供することを課題とする。
【解決手段】自車両周辺を撮像した画像における特定の画像処理領域に対して画像処理を行い、自車両周辺の物体の情報を取得する物体検出装置であって、自車両周辺の物体の位置情報を取得する位置情報取得手段(S1)と、自車両周辺を撮像する撮像手段と、位置情報取得手段で取得した物体の位置情報に基づいて撮像手段で撮像した画像における画像処理領域を設定する画像処理領域設定手段(S2)と、自車両の挙動の変化を検出する車両挙動検出手段(S3)と、車両挙動検出手段で検出した自車両の挙動の変化に応じて画像処理領域設定手段で設定した画像処理領域を補正する補正手段(S5)を備えることを特徴とする。
(もっと読む)
レーダアンテナ及びレーダ装置
【課題】方位角、仰角を電気的に測定可能とすること。
【解決手段】放射素子を1方向であるz軸方向、直線状に配置したアレーアンテナ30、31、32を、z軸に垂直な方向であるy軸方向に離間して、少なくもと3本設けたレーダアンテナにおいて、各アレーアンテナのz軸方向における配設位置を異なる位置とした。複数のアレーアンテナの中から少なくとも任意の2本を選択して構成される複数の組において、アレーアンテナ間の位相差δと、仰角φ、方位角θとの関係を用いて、各組の測定された各位相差から、φ、θを求める。
(もっと読む)
信号処理装置、レーダ装置、及び信号処理方法
【課題】アップ期間とダウン期間でピーク信号のレベルが一致する場合であっても、精度良くピーク周波数のペアリングを行う。
【解決手段】
周波数変調を施した第1のレーダ信号の周波数上昇期間に前記ビート信号の周波数スペクトルが極大値を形成する第1のピーク周波数と、前記第1のレーダ信号の周波数下降期間に前記ビート信号の周波数スペクトルが極大値を形成する第2のピーク周波数とを検出するピーク周波数検出手段と、所定周波数の第2のレーダ信号の送信時と受信時の周波数差に基づいて目標物体の相対速度を検出する速度検出手段と、前記相対速度が導出されるような前記第1、第2のピーク周波数のペアを抽出するペアリング手段とを有するので、ピーク周波数におけるビート信号のレベルがそれぞれ一致(または近似する)ピーク周波数をペアリングする場合であっても、精度良くペアリングを行うことができる。
(もっと読む)
正面及び側方放射を持つレーダセンサ
自動車の周辺検出用レーダセンサであって、複数の送信アンテナにより送信信号を放射する送信手段、物体において反射される送信信号を複数の受信アンテナにより受信する受信手段、及び受信される信号を処理する信号処理手段を有するものにおいて、複数の送信アンテナ及び複数の受信アンテナがあって、平らな基板の表側及び裏側に設けられて送信又は受信を行う少なくとも1つの個別素子(以下基本放射体と称する)をそれぞれ含み、少なくとも1つの送信アンテナ及び受信アンテナがあって、平らな基板に設けられかつレーダセンサ外で基板の垂線に対して最大でも45°で傾斜するビーム円錐中心を持つ少なくとも1つの基本放射体をそれぞれ含み、少なくとも1つの送信アンテナ及び受信アンテナがあって、平らな基板に設けられかつレーダセンサ外で基板の垂線に対して45°以上で傾斜する少なくとも1つの基本放射体をそれぞれ含んでいることを特徴とする。 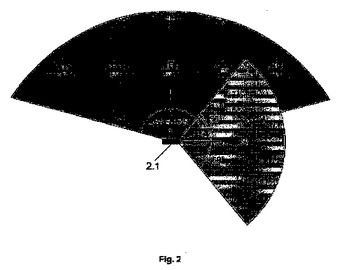 (もっと読む)
(もっと読む)
重なる送信アンテナ及び受信アンテナを有するレーダシステム
自動車の周辺検出用レーダシステムであって、1つ又は複数の送信アンテナにより送信信号を放射する送信手段、物体において反射される送信信号を1つ又は複数の受信アンテナにより受信する受信手段、及び受信した信号を処理する信号処理手段を有するものにおいて、プレーナ技術で実現されて平らな面に設けられている送信アンテナ及び受信アンテナがあり、これらの送信アンテナ及び受信アンテナがそれぞれ少なくとも近似的に同じ放射特性を持ち、これらの送信アンテナの放射特性がこれらの受信アンテナの放射特性に対して異なっていることができ、これらの送信アンテナ及び受信アンテナの異なる組み合わせから受信信号が取得され、信号処理手段においてこれらの受信信号から、物体のために空間方向Rにおけるその角度位置が評価され、その際個々の物体の受信信号が空間方向Rにおけるこの物体の角度位置に従って互いに異なる位相位置を持っていることが利用され、これらの送信アンテナ及び受信アンテナの少なくとも2つが、空間方向Rに関して一致することなく重なり、この重なりがこれらの送信アンテナ及び受信アンテナの次の配置又は構成の少なくとも1つによって実現される
a)アンテナが空間方向Rに対して直角な空間方向Sに関して互いにずれており、特に水 平な空間方向Rのために送信アンテナが受信アンテナの上に設けられている
b)送信アンテナ及び/又は受信アンテナが空間方向Rに関して斜めの形状を持っているc)アンテナが空間方向Rに関して互いにはまり合っている
d)放射するか又は受信する素子が少なくとも2つの送信アンテナ又は受信アンテナによ り共通に使用される
ことを特徴とする。 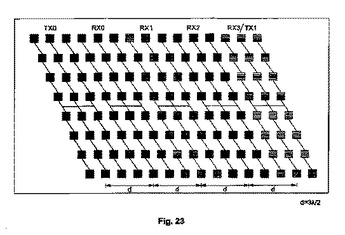 (もっと読む)
(もっと読む)
信号処理装置、レーダ装置、及び、信号処理方法
【課題】受信領域端部に実在する物体からの受信信号から検出される方位角のうち、受信領域中心部で誤検出された方位角を誤りと判定するとともに、受信領域端部において検出される方位角を正しいと判定する。
【課題を解決するための手段】
基準方向にレーダ信号を送信し、所定間隔離間したアンテナ対で受信したレーダ信号対の位相差から物体の方位角を検出する信号処理装置において、前記受信信号対の強度が、当該受信信号対から検出された前記方位角と前記距離との組合せに対応する基準値以上のときに、当該方位角が正しいと判定し、前記強度が前記基準値未満のときに当該方位角が誤りと判定する。このとき基準値は、前記距離に応じて異なるとともに、前記方位角に応じて異なるので、受信領域中心部内で誤検出された方位角を誤りと判定するとともに、受信領域端部において検出される方位角を正しいと判定することができる。
(もっと読む)
改善された角度形成を持つレーダシステム
自動車の周辺検出用レーダシステムであって、少なくとも2つの送信アンテナにより送信信号を放射する送信手段、物体において反射される送信信号を1つ又は複数の受信アンテナにより受信する受信手段、及び受信した信号を処理する信号処理手段を有するものにおいて、少なくとも1つの受信アンテナの位相中心が、空間方向Rに関してこの空間方向にずれた2つの送信アンテナの位相中心外になく、アンテナにより受信される信号が、これら2つの送信アンテナに由来する成分に従って分離されることを特徴とする。 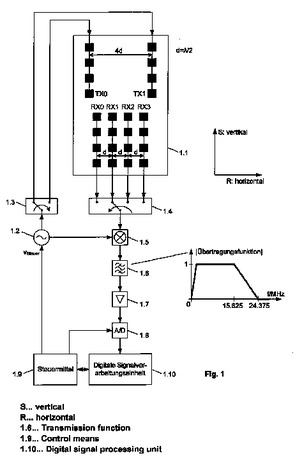 (もっと読む)
(もっと読む)
物体検出装置
【課題】複数の移動物体が近接している場合であっても、各移動物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、粗決定サーチ関数及び精決定サーチ関数に基づいて、移動物体毎に対応する遅延時間を特定できるか否かの判定を行う時間判定部106と、ステレオカメラ23を介して、複数の移動物体を含む画像を取得する画像取得部108と、遅延時間を特定できないと判定された場合に、取得された画像に基づいて、遅延時間を特定できないと判定された移動物体である特定困難物体に対応する粗決定サーチ関数及び精決定サーチ関数を補正する関数補正部112と、補正された粗決定サーチ関数及び精決定サーチ関数に基づいて、特定困難物体に対応する遅延時間を特定する遅延時間特定部113と、特定された遅延時間に基づいて、特定困難物体との距離を求める距離算出部114と、を備える。
(もっと読む)
301 - 320 / 1,037
[ Back to top ]