
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
261 - 280 / 1,037
検出装置および方法、並びにプログラム
【課題】ランダムに検出される検出位置情報に基づいて、正確に物体の進行方向および速度を検出できるようにする。
【解決手段】検出位置特定部81は、検出された物体の検出位置における速度、距離、および角度に基づいて、物体の相対的な検出位置を特定し、含有数カウント部86は、物体の相対的な検出位置を時刻に対応付けて、水平方向の検出位置を示す軸と進行方向の検出位置までの距離を示す軸とで設定される2次元の平面上にプロットし、物体の進行方向の先頭部分が所定時間内に通過すると予想される平面上の形状からなるフレームを所定の回転角度で回転させながら、回転角度毎にフレーム内に含まれるプロットされた検出位置の数をカウントし、方向決定部87は、カウントされたプロット数が最大となるフレームの回転角度に基づいて、物体の存在する存在位置、および進行方向を決定する。本発明は、車両安全装置に適用することができる。
(もっと読む)
レーダ送受信機、及びレーダ装置

【課題】 ビート信号のレベルに基づきアップビート周波数とダウンビート周波数のペアリングを確度良く行う。
【解決手段】 レーダ送受信機は、変調期間ごとに所定の周波数変調幅で周波数が上昇する第1の送信信号と、前記変調期間ごとに前記所定の周波数変調幅で周波数が下降する第2の送信信号とを前記変調期間より短いスイッチング周期で交互に切替えて送信し、前記変調期間における前記第1の送信信号とこれに対応する受信信号との周波数差を有する第1のビート信号と、前記第2の送信信号とこれに対応する受信信号との周波数差を有する第2のビート信号とを生成するので、従来、異なる時間帯で生成されていたビート信号を同一の変調期間内にほぼ同時に生成できる。よって、時間差に起因してペアリングすべきアップ/ダウンビート周波数のビート信号にレベル差が生じることがなくなり、ペアリングを確度よく行うことができる。
(もっと読む)
レーダ装置
【課題】軽い演算負荷で干渉信号の影響を低減できるレーダ装置を提供する。
【解決手段】制御演算部は、送信信号と反射信号とを混合部で混合したビート信号を逐次サンプリングして取得する。制御演算部は、取得したビート信号に基づき、ビート信号に干渉信号が含まれる干渉期間を特定する。干渉期間を特定すると、制御演算部は、特定した干渉期間を除く期間で取得したビート信号に対してFFT処理をした結果に基づき、対象物との相対距離、及び相対速度を測定する。
(もっと読む)
三角波信号生成回路、及びレーダ装置
【課題】D/A変換器の調整幅の数を変更せずに、異なる所望の振幅を有する複数の矩形波信号を精度よく生成する。
【解決手段】
入力される矩形波信号を積分して三角波信号を生成する積分回路と、基準電圧を所定数で等分した調整幅で前記基準電圧を低下させ、当該低下させた基準電圧を振幅とする矩形波信号を生成して前記積分回路に入力するD/A変換器とを有する三角波信号生成回路であって、前記D/A変換器は、複数の基準電圧ごとに、前記積分回路にてそれぞれ所望の振幅の三角波信号が生成されるような振幅が異なる矩形波信号を生成するので、小さい振幅の矩形波信号を生成するときには小さい基準電圧を小さい調整幅で調整し、大きい振幅の矩形波信号を生成するときには大きい基準電圧を大きい調整幅で調整でき、調整幅の数を変更することなく異なる所望の振幅の矩形波信号を精度よく生成できる。
(もっと読む)
レーダ装置
【課題】不要電波の送信を抑制するとともに、車両が停車時でも先行車両を検出する。
【解決手段】車両に搭載され所定の走査範囲をレーダ波で走査するレーダ装置は、前記車両の走行速度が第1の速度のときには、前記走査範囲内で第1の単位角度ごとにレーダ波を送信し、前記走行速度が前記第1の速度より遅い第2の速度のときには、前記走査範囲内で前記第1の単位角度より広い第2の単位角度ごとに前記レーダ波を送信する送信制御手段と、前記送信されたレーダ波の目標物体による反射波に基づいて前記目標物体を検出する目標物体検出手段とを有するので、レーダ装置全体としては不要なレーダ波の送信を抑制できるとともに、近距離の目標物体に対してはこれを検出するために必要なレーダ波の反射点を得ることができる。
(もっと読む)
車両周辺監視装置
【課題】レーダからの反射波を受信して物標を検出する場合に、物標の検出精度を向上させる。
【解決手段】車両周辺監視装置1のECU30に、レーダ10が取得した他車両からの反射波の反射ピークに基づいて物標を検出するとともに、所定のグルーピング条件を満たす複数の物標をグルーピングし、この物標が所定の確定条件を満たす場合に、この物標の検出を確定して追跡するトラッキング部31と、物標が確定条件を満たさない場合に、前回の予測値に基づいて物標の補間処理を行う補間処理部32と、警報を発生させる警報処理部33とを備える。そして、補間処理部32は、物標が確定条件を満たさない回数が所定回数を超えると、物標の予測周波数範囲f’における反射ピークの数が所定の閾値以上であって、予測周波数範囲f’における反射ピークのパワー平均値が所定の閾値以上であった場合に限り、補間処理を延長する。
(もっと読む)
平面アンテナ、及びレーダ装置
【課題】傾動機構を用いずにレーダ装置筐体に対する平面アンテナの角度を変化させる。
【解決手段】平面状のベース板と前記基板上に設けられたアンテナ素子とを有するとともに前記ベース板がレーダ装置の筐体に固定される平面アンテナにおいて、前記ベース板は、前記アンテナ素子が配置されない第1の領域と、前記アンテナ素子が配置された第2の領域とを有し、前記第1の領域が前記筐体に固定された状態で前記第2の領域が前記筐体に備えられる駆動手段により駆動されるときに、前記第2の領域が前記筐体に対し所定の角度になるように前記第1、第2の領域の間で折り曲げられるので、平面アンテナを傾動させる傾動機構を用いなくてもレーダ装置の筐体に対する平面アンテナの取り付け角度を変化させることができ、ビーム軸を調整できる。
(もっと読む)
レーダ装置
【課題】アンテナから放射された電磁波ビームの地面反射波の受信を回避しながら、地上高さの低い物体を検知できるレーダ装置を提供すること。
【解決手段】アンテナ11〜13のそれぞれは、扇形の広がりをもつ電磁波ビームB1〜B3を放射し、被検知物3によって反射された電磁波ビームの反射波を受信するものであって、順次に縦積みされて地面4から所定高さh1〜h3にある。地面4からの被検知物3の地上高さをH(m)とし、アンテナ11〜13から被検知物3までの距離をR(m)としたとき、アンテナ11〜13の何れも、自己の放射する電磁波ビームB1〜B3の扇形最下縁が、距離Rの範囲内において、地上高さHを超えず、かつ、受信反射波に地面4で反射された反射波が含まれない仰角θ1〜θ3を持つ。
(もっと読む)
踏切障害物検知装置
【課題】故障検出の信頼性を向上させた、低コストで設置容易な踏切障害物検知装置を提供する。
【解決手段】送信部12は、アンテナATN1によって、検知領域Sに電波W1を送信する。電波検出部14は、電波W1を受信して、所定時間遅延させた後、検査用電波W3として受信部13に向けて送信する。受信部13は、アンテナATN2によって、この電波W1に対する反射波W2と検査用電波W3とを受信し、電気信号E2に変換して信号処理部11に出力する。信号処理部11は、電気信号E2を解析し、反射波W2の検出結果に基づいて検知領域S内の障害物5,6を検知するとともに、検査用電波W3の検出結果に基づいて故障を検知する。
(もっと読む)
レーダ装置の制御方法、レーダ装置、プログラム
【課題】レーダ装置において、対象物の測定精度を向上させる。
【解決手段】FM−CWレーダ機能とパルスレーダ機能とを併せ備えたレーダ装置において、FM−CWレーダ機能による対象物の測定(ステップ121)と、FM−CWレーダ機能で得られた距離データの部分だけでのパルスレーダ機能による測定と、これらの測定結果の比較(ステップ122)と、パルスレーダ機能で、FM−CWレーダ機能の測定結果の距離に対象物を検知できない場合、矛盾があった距離データの電力ピーク値の近傍のスライス値(Th1)を下げて行う再度のピーク探索と再ペアリング(ステップ124)とにより、レーダ装置による対象物の距離や速度の測定精度を向上させる。
(もっと読む)
信号処理装置、レーダ装置、及び信号処理方法
【課題】複数の目標物体のピーク周波数が近似することによる方位角の検出精度低下を防ぐ。
【解決手段】周波数変調を施した送信信号の反射信号をアンテナ群により受信信号として受信し、前記アンテナごとに前記送信信号と受信信号の周波数差に対応する周波数を有するビート信号を生成するレーダ送受信機の信号処理装置は、前記アンテナの対ごとに共通の周波数における前記ビート信号の位相差に基づいて目標物体の方位角候補を検出し、前記方位角候補群のうち、過去に検出された検出方位角の変化量から予測される予測方位角と所定誤差範囲内で一致する方位角候補を抽出し、前記予測方位角と前記抽出された方位角候補とに基づいて当該目標物体の方位角を検出するので、複数の目標物体のピーク周波数が近似することにより方位角候補の検出精度が低下しても、予測方位角を用いることで検出方位角の精度低下を防ぐことができる。
(もっと読む)
レーダ装置
【課題】車両前方の障害物の誤測定を低減するレーダ装置を提供する。
【解決手段】レーダにより測定された障害物との相対速度及び距離に基づいて、障害物が対向車でないと判定すると(S1,S2)、相対速度及び距離に基づいて、障害物が停止してるか否かを判定する(S3)。障害物が停止してれば(S3 Yes)、レーダの測定結果に基づき障害物が車両進行方向に対し所定幅を有する仮想的な自車線内に所定時間存在し続けるか否かを判定する(S4〜S7)。そして、障害物が所定時間存在し続ければ(S7 Yes)、又は、障害物が停止してなければ(S3 No)、測定された距離が自車線内に存在する各障害物までの距離のうち最も短いか否かを判定し(S8)、最も短ければ、測定された距離並びに相対速度を出力する(S9)。
(もっと読む)
物体検出装置
【課題】高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、物体10を、ある程度離れた距離で検出したときの反射光量を基準反射光量とする。また、物体10を検出する毎に、この物体を障害物であると仮定し、基準反射光量を用いて、今回算出した距離での反射光量を推定する。推定した反射光量に対して、今回検出した反射光量が所定の割合未満であるかどうかによって、障害物であるかどうかを判定する。
(もっと読む)
一体型レーダー−カメラセンサ
【課題】一体型レーダー−カメラセンサモジュールを提供する。
【解決手段】本発明による一体型レーダー−カメラセンサモジュールは、カメラセンサ要素及びレーダーセンサ要素を含み、これらの要素は、両方とも、共通の単一のモジュールハウジングに収容されている。センサモジュールは、更に、レーダーセンサ及びカメラの出力を演算処理するための演算処理回路を含む。このセンサモジュールは、車両のフロントガラスの後方に配置され、グレアシールド及び/又はEMIシールドを備えていてもよい。
(もっと読む)
回路装置及びレーダ装置
【課題】不要輻射を効率良く抑制することが可能な回路装置及びレーダ装置を提供することを目的とする。
【解決手段】高周波送受信回路(141、151)が実装された基板(140、150)と、基板が載置されるシャーシ(160)と、高周波送受信回路を覆い且つシャーシと係合する弾性力を調節するための複数のスリット(130〜139)が設けられているカバー(120)を有することを特徴とする回路装置(100)及びその様な回路装置を含むレーダ装置(10)。
(もっと読む)
広帯域レーダ装置
【課題】レーダ装置に関し、特に、超広帯域の電波を送受信して移動物体等の目標の位置を高精度で検出する広帯域レーダ装置に関し、複数の受信波を合成して目標物体の距離や方位等を検出するレーダ装置において、送信及び受信アンテナ間の距離が小さく、目標物体が広帯域レーダ装置から距離が離れた場合でも、目標物体の方位精度を高めた小型かつ超広帯域レーダ装置を得る。
【解決手段】2つの受信アンテナ部で受信した2つの受信パルス信号が、サンプリング積分検波されて2つのデジタル信号に変換された後、移動物体を検出した2つの応答差分信号が得られる。2つの信号から、任意の距離離れた第1の仮想受信アンテナ部及び第2の仮想受信アンテナ部で受信する擬似応答差分信号が算出される。この信号を用いて移動目標の距離と方位を検出することで、目標物体の距離がある程度離れても、方位精度を高めることができる。
(もっと読む)
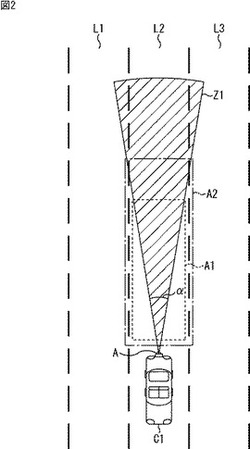
物体検出装置
【課題】複数の物体が近接している場合であっても各物体を精度良く検出することができる物体検出装置を提供する。
【解決手段】歩行者検出装置1は、レーザレーダ2、カメラ3、運転支援ECU4及び制動部5を備える。歩行者検出装置1は、第1の歩行者候補点群L1に対し、第1の歩行者候補点群L1の分布幅より小さい幅を有する第1の検出領域Tを設定し、第1の検出領域T内に位置する検出点P1〜P3を抽出することにより、歩行者M1の検出を行う。第1の検出領域T内に位置しない検出点P4〜P9は、第2、第3の歩行者候補点群L2,L3として順次抽出され、第1の歩行者候補点群L1と同様な処理が行われる。これにより、複数の歩行者が近接している場合であっても各歩行者を精度良く検出できる。
(もっと読む)
レーダ装置
【課題】物標に関する情報の算出を精度良く行う。
【解決手段】レーダ装置は、送受信手段と、物標検出手段とを備える。送受信手段は、レーダ波を送信するとともに、物標により反射されたレーダ波を逐次受信する。物標検出手段は、送受信手段が受信した受信信号のスペクトルにおけるピークに基づいて物標を検出し、当該ピークから物標を検出できない場合に物標を外挿状態と判断する。また、物標検出手段は、スペクトルにおけるピークの状態に基づいて外挿状態の種類を決定する。
(もっと読む)
信号処理装置、及びレーダ装置。
【課題】 電子スキャン方式のレーダ装置においてアンテナ間隔をある程度離間させた状態であっても、方位角検出範囲を広角化する。
【解決手段】 目標物体に反射された送信信号を複数のアンテナで受信して前記アンテナごとのビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号を合成して合成ビート信号を生成する合成手段と、前記ビート信号のいずれかと前記合成ビート信号に基づいて前記目標物体の方位角を検出する方位角検出手段とを有するので、アンテナ対の間に仮想アンテナを配置した場合にこの仮想アンテナにより得られるビート信号と同じ位相の合成ビート信号を得ることができ、ビート信号と合成ビート信号とに基づき方位角を検出することで、アンテナ間隔をある程度離間させたままで位相折り返しが発生しない方位角検出範囲を広角化できる。
(もっと読む)
信号処理装置、及びレーダ装置。
【課題】 機械走査方式のレーダ装置においてアンテナが所期の反転位置からずれた位置で反転したときでも精度よく回動角度を検出する。
【解決手段】所定の角度範囲内で往復回動する回動部が単位角度回動するときに角度信号が入力される信号処理装置であって、前記角度信号の状態遷移に基づいて前記回動部の回動方向の反転を検出する反転検出手段と、前記反転を検出した後に入力される前記角度信号に基づき前記回動部の回動角度を検出する回動角度検出手段とを有し、前記回動角度検出手段は、前記反転検出手段により前記回動部の第1の反転が検出された後第2の反転が検出されるまでに入力された前記角度信号に基づき、前記第2の反転が検出された後に入力される角度信号に基づく回動角度を補正するので、所期の反転位置からの角度信号に基づく回動角度を検出できる。
(もっと読む)
261 - 280 / 1,037
[ Back to top ]