
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
181 - 200 / 1,037
物体検出装置
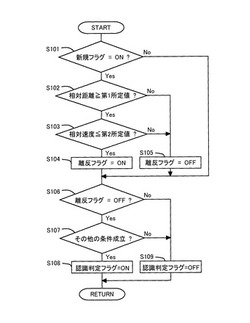
【課題】他車両が自車両に対して接近しているのか離反しているのかを精度良く検出する。
【解決手段】レーダで自車両の後側方物体を検出する物体検出装置において、前記後側方物体を継続して検出している期間中の所定の時期に検出した自車両と後側方物体との相対距離及び相対速度に基づいて前記後側方物体が自車両から離反する物体であるか否か判定する。実際に接近してくる物体と、実際には離反しているが接近してくると誤認している物体とでは、過去の所定の時期に検出した自車両と後側方物体との相対距離及び相対速度が異なることを利用する。
(もっと読む)
自己位置推定装置、自己位置推定方法及びプログラム

【課題】自己位置の推定を高精度に行うこと。
【解決手段】自己位置推定装置10は、検出領域内の物体との距離情報を検出する距離センサ11を備え、距離センサ11により検出された物体との距離情報に基づいて、自己位置を推定する。また、自己位置推定装置10は、距離センサ11の検出領域を複数の小領域に分割し、距離センサ11により検出された物体の距離情報と、地図情報とに基づいて、小領域毎に自己位置を判定する小領域判定手段と、小領域判定手段により判定された小領域毎の自己位置の判定に基づいて、自己位置が正常であるか否かを最終的に判定する自己位置判定手段と、を備えている。
(もっと読む)
信号処理装置
【課題】パワー推定に際して効率的な演算を行うことにより、アレーアンテナのアンテナ素子数Kの増加による演算量の増加を抑制する。
【解決手段】本発明のレーダ装置は、アレーアンテナを構成する各アンテナ素子の受信信号から生成した自己相関行列の固有値/固有ベクトルの内、雑音空間の固有ベクトルと到来波方位のアレー応答ベクトルとの間にある直交関係を利用することで、雑音空間を除く信号空間の固有値及び固有ベクトルを選択的に用いて、自己相関行列をESΛSESHに近似し(ΛSは、信号空間の固有値λ1,…,λMを対角成分に持つ対角行列、ESは、信号空間の固有ベクトルe1,…,eMを列とする信号部分空間行列である。)、この近似行列ESΛSESHに、到来方位θ1,…,θMのアレー応答ベクトルa(θ1),…,a(θM)を列とするアレー応答行列Vを作用させることにより、各到来方位から到来した到来波のパワーP(θ1),…,P(θM)を推定する。
(もっと読む)
物体検出装置
【課題】レーダ装置が検出した物体について、衝突判断の対象物とする必要があるか否かの判断を適切に行うことのできる物体検出装置を提供する。
【解決手段】物体検出装置は、車両の周辺の物体を検出する検出手段と、検出手段が検出した物体について、当該物体の進行方向、当該進行方向から算出される物体の存在位置、および進行方向を示す直線と車両の中心軸とがなす角である進入角度を示す車両情報を算出する処理手段と、車両から車幅方向に沿った物体までの側方距離および進行方向を示す直線と車両の中心軸とがなす角の角度に基づいて予め設定された判定範囲を示す判定情報を記憶する記憶手段と、処理手段が算出した車両情報を用いて、存在位置および進入角度が判定範囲内であるか否かに基づいて物体を車両と衝突の危険性判断の判断対象である衝突判定対象物とするか否かを判定する判定手段とを備える。
(もっと読む)
電子キーシステム
【課題】電子キーシステムにおいて、無線技術を利用した電子キーの存在する位置の偽装等を困難とすることで、よりセキュリティ性を向上させること。
【解決手段】ユーザは乗車後に車両ドア5の閉じ操作を行うところ、車両ドア5の閉じた時刻t1から一定時間T1経過後の時刻t2までの間、ユーザに他の動作はなく、静止していると想定される。そこで、車載装置20は、車両ドア5の閉じた時刻t1から時刻t2までの間におけるユーザの静止の有無に基づき、ユーザの動きの妥当性の判断を行う。このように、無線通信を通じたIDコードの照合に加え、乗車時における車両ドア5閉時のユーザ(電子キー10)の動きが適切であるかの認証を行うことで、電子キー10の存在する位置の偽装が困難となり、電子キーシステム1のセキュリティ性を向上させることができる。
(もっと読む)
電子キーシステム
【課題】電子キーシステムにおいて、無線技術を利用した電子キーの存在する位置の偽装等を困難とすることで、よりセキュリティ性を向上させること。
【解決手段】車載装置20はRSSI検出回路16が検出する要求信号Sro、Sriの信号強度の変化の態様に基づき電子キー10を携帯するユーザの動きの妥当性を判断する。ユーザの動きが妥当でないと判断した場合には、正規のユーザが実際に車両2付近にいるか否かが不明であるとして車両ドアの解錠又はエンジンの始動を許可しない。このように、IDコードの照合に加え、ユーザ(電子キー10)の動きが適切であるかの認証を行うことで、電子キー10の存在する位置の偽装が困難となり、電子キーシステム1のセキュリティ性を向上させることができる。
(もっと読む)
波形観測装置及び方法
【課題】移動体を対象とした反射パルスの波形を高精度で観測することができる波形観測装置を提供する。
【解決手段】波形観測装置1は、繰り返し周波数を発生する繰り返し周波数発生器2と、繰り返し周波数でフェムト秒パルス光を発生するパルス発生器3と、フェムト秒パルス光をテラヘルツパルス波に変換して送信するパルス送信器4と、フェムト秒パルス光を励起用パルス光21と同期検波用パルス光22に分割するハーフミラー5と、ミラー6と、パルス波の方向を走査するビーム走査機構7と、反射波を受信して電流パルスに変換するパルス受信器8と、繰り返し周波数発生器2を制御する周波数制御部9と、受信波形を取得する波形取得部15と、距離計測部16と、波形計測部17と、出力部18と、対象別送信パラメータ算出部19とを備える。
(もっと読む)
測距方法及び装置
【課題】送信波の占有周波数帯域幅が電波法で規定する76MHz以内となる条件でも、最小探知距離と距離分離分解能を短くできるようにする。
【解決手段】掃引回路18から、24.05GHz〜24.25GHzの振り幅200MHzの掃引信号を出力し、スイッチ回路20ではこの掃引信号を切取り信号を用いて周波数分割して占有周波数帯域幅50MHzの4つの信号を形成し、これを送信信号として出力する。一方、受信側では、幅50MHzの送信信号で得られた4つの受信信号を入力した位相検波器23にて、送信信号と同期した周波数帯域幅200MHzの局部発振信号で検波することで、4つのビート信号を取得する。これらのビート信号は、合成するとそれぞれの波形が連続した状態となり、占有周波数帯域幅200MHzの送信信号を用いて得られるものと同等となり、近距離の測距が可能となる。
(もっと読む)
移動体検出方法及び移動体検出装置
【課題】データ処理を複雑化することなく、また、装置構成を大規模とすることなく、複数の移動体を区別して追跡することができる移動体検出方法及び移動体検出装置を提供する。
【解決手段】検出対象となる移動体までの距離を検出する測距センサ1を用いて複数の移動体までの距離をそれぞれ検出し、各移動体までの距離に基づいて各移動体の速度を算出して記憶し、二以上の移動体までの距離が互いに等しくなりその後にこれらの距離が異なるものとなったときには、記憶されていた各移動体の速度に基づいて、各移動体を区別する。
(もっと読む)
レーダ装置
【課題】MUSIC法やEsprit法などによって到来波数の推定を行うレーダ装置において、精度良く到来波数の推定が行えるようにする。
【解決手段】到来波数を任意の初期値に固定しておき、この初期値に基づいて仮の到来波数を求めたのち、仮の到来波の各方位の受信パワーがスレッショルドを超えているか否か判定し、超えていないものを到来波から除くことで、実際の到来波数を求める。これにより、実際の到来波数を正確に求めることが可能となる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】
車載レーダ装置の受信感度の低下を正確かつ迅速に検出する。
【解決手段】
車両に搭載されるとともに前記車両周囲に送信信号を送信して物標に反射された前記送信信号を受信するレーダ送受信機の信号処理装置において、前記車両に搭載された画像認識手段が前記物標の撮像画像に基づき前記物標の種別と距離とを検出し、受信感度監視手段が受信信号のレベルまたは前記受信信号から生成される信号のレベルが前記物標の距離と種別とに対応づけられた基準レベル以上であるか否かを検出するので、受信信号や受信信号から生成される信号のレベルに適切な基準レベルを適用できる。よって、受信感度の低下を正確かつ迅速に検出できる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】 レーダ軸のずれを精度よく検出する。
【解決手段】
車両に搭載されるとともに静止物標に反射されたレーダ信号を受信するレーダ送受信機の信号処理装置は、前記静止物標における前記レーダ信号の反射点を前記受信したレーダ信号に基づき検出する物標検出手段と、前記車両に搭載された画像認識装置が前記静止物標の近傍に他の物標が存在しないことを前記静止物標を含む撮像画像に基づき検出したときに、前記反射点の分布方向と基準方向との差が基準値以上か否かを検出する軸ずれ検出手段とを有するので、軸ずれ検出に適した状況で軸ずれ検出を行い、適さない状況での軸ずれ検出を回避できる。よって、軸ずれを精度よく検出できる。
(もっと読む)
目標追尾処理器及びそれに用いる誤差共分散行列の補正方法
【課題】 観測値の入力頻度が低下した場合、または観測値の入力が無くなった場合においても、誤差共分散が過度に大きくなったり、異常な値となったりすることを防止することが可能な目標追尾処理器を提供する。
【解決手段】 目標追尾処理器は、目標の位置を観測するセンサの観測値からその目標の位置、速度及び針路を状態変数として推定するカルマンフィルタを用いた目標追尾を行う。また、目標追尾処理器は、状態変数の分散を表す誤差共分散を補正する手段(ダミー作成起動部20、ダミー観測時刻作成部21、ダミー観測値作成部22)を有する。
(もっと読む)
センサネットワークシステムおよびセンサ装置
【課題】さらに高い追尾性能を実現するセンサネットワークシステムを得ること。
【解決手段】本発明は、複数のセンサ、および複数のセンサを制御する制御装置を含んだセンサネットワークシステムであって、制御装置は、センサの各々における観測結果に基づいて、どのセンサからどのような情報を出力させるかを示す情報である優先度の暫定値をセンサ毎に決定し、センサの各々は、近隣のセンサとの間で観測動作に関する情報を交換し、得られた観測動作情報に基づいて、制御装置で決定された自センサの優先度の暫定値を調整し、制御装置は、各センサで調整された後の優先度に基づいて通信帯域制御を行う。
(もっと読む)
物体検知方法
【課題】 レーダー装置により至近距離の物体を確実に検知できる物体検知方法を提供する。
【解決手段】 検知されたターゲットと同方向で距離が2倍の位置にダミーターゲットを設定し、ダミーターゲットの位置を含む所定範囲に倍波ターゲット検知範囲を設定し、倍波ターゲット検知範囲に検知されたターゲットを倍波ターゲットとして判定し、倍波ターゲットと同方向で距離が2分の1の位置に補間ターゲットを設定し、補間ターゲットの位置を含む所定範囲に基本波ターゲット検知領域を設定し、基本波ターゲット検知領域に基本波ターゲットが検知されない場合に補間ターゲットを基本波ターゲットとして出力する。このように、検知すべき基本波ターゲットが至近距離において非検知状態になっても、依然として検知されている倍波ターゲットから算出した補間ターゲットにより基本波ターゲットのデータを推定して出力することで、基本波ターゲットを継続的に検知し続けることができる。
(もっと読む)
駐車位置探索システム
【課題】車両方向を認識できる駐車位置探索システムを得ること。
【解決手段】本発明の駐車位置探索システムにおいて、携帯電子キー1は、探索開始ボタン11と、探索開始ボタン11がONの間、車両2との間で識別可能なIDを含む無線信号を送信する無線ID送信部12と、応答信号を受信する指向性超音波センサー13と、受信レベルを探索者へ通知する受信レベル通知部14とを備え、指向性超音波センサー13は、指向性を有し、車両2方向に向けて応答信号を受信した場合に応答信号を最大受信レベルで受信し、車両2は、無線信号を受信する無線受信部21と、受信した無線信号に携帯電子キー1との間で識別可能なIDが含まれているかを判定するID判定部22と、識別可能なIDが含まれていると判定された場合に応答信号を送信する超音波送信部23とを備える。
(もっと読む)
レーダ装置
【課題】高精度に目標を観測できるレーダ装置を提供する。
【解決手段】第1送受信兼用素子と第2送受信兼用素子とに分割された送受信兼用素子11aと、第1受信専用素子と第2受信専用素子に分割された受信専用素子12aを備えたアンテナ10と、観測角度範囲を複数に分割して、アンテナの各素子により、分割した角度範囲の各々を覆うように送信ビームを形成し、受信は、アンテナの各素子のビーム指向方向を第1送受信兼用素子と第2送受信兼用素子と同じ方向にして、第1送受信兼用素子と第1受信専用素子、第2送受信兼用素子と第2受信兼用素子により、ΣとΔの位相モノパルスビームを形成して複数の角度範囲の各々を覆い、第1送受信兼用素子、第2送受信兼用素子、第1受信専用素子および第2受信専用素子により、狭ビーム幅のビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37を備える。
(もっと読む)
道路曲率見積もりシステムおよび自動車目標状態見積もりシステム
【課題】道路の曲率を見積もる。
【解決手段】第一のカルマンフィルター(52)は、ヨーレートおよび速さの測定値をホスト車両内のそれぞれのセンサー(16、18)の測定値から見積もり、第二のカルマンフィルター(54)はそれらから道路曲率のクロソイドモデルのパラメータを見積もる。レーダーシステム(14)からのレンジ、レンジレートおよびアジマス角の測定値は、目標車両36の状態の非束縛の見積もりを提供するために拡張されたカルマンフィルター(56)によって処理される。関連する道路に束縛された目標の状態の見積もりは一または二以上の道路のレーンについて発生され、独立でまたは組み合わせで非束縛の見積もりと比較される。もし束縛された目標の状態の見積もりが非束縛の見積もりに対応しているなら、目標車両の状態は非束縛及び束縛の見積もりの統合で発生され、そうでないならば、非束縛の見積もりのみで与えられる。
(もっと読む)
障害物検出装置および障害物検出方法
【課題】障害物や駐車枠などの本来反射波を得たい対象物からの反射波を適切に検出することができる障害物検出装置を提供すること。
【解決手段】車両の周辺に送信波を発信する発信手段と、前記送信波の対象物からの反射波を、受信反射波として受信する受信手段と、前記受信手段により受信した受信反射波が、一定時間連続して発生しているか否かを判断し、一定時間連続して発生している場合に、該受信反射波を路面からの反射波として検出する路面反射波検出手段と、前記路面からの反射波であると判断された受信反射波に基づいて、前記受信手段により受信した受信反射波中に含まれる路面からの反射波を検出するためのノイズ判定閾値を設定する設定手段と、前記ノイズ判定閾値を用いて、前記受信手段により受信した前記受信反射波から、路面以外の対象物の反射波を検出する対象物反射波検出手段と、を備えることを特徴とする障害物検出装置。
(もっと読む)
FM−CWレーダ装置および数値補正方法
【課題】安価なAD変換器を用いて、スプリアスの少ないFM−CWレーダ装置を得る。
【解決手段】FM−CWレーダ装置が有するAD変換器に対して正確な試験用電圧を印加した際にAD変換器より出力されたコードと印加した電圧値とを対応付けたテーブルを記憶するADコード補正手段を設ける。そして、ADコード補正手段は、AD変換器より出力されたコードを取得し、取得されたコードと対応付けられた電圧値を出力する。FM−CWレーダ装置は、ADコード補正手段より出力された電圧値を用いて、目的物の相対速度および距離等を計測する。
(もっと読む)
181 - 200 / 1,037
[ Back to top ]