
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
221 - 240 / 1,037
車両制御装置
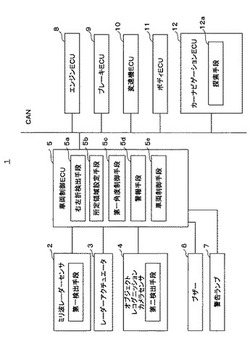
【課題】車両の安全を十分に確保することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、車両の前方の障害物との距離を検出する第一検出手段と、車両の右折又は左折の開始及び終了を検出する右左折検出手段5aと、車両の前方の所定領域を設定する所定領域設定手段5bと、右左折検出手段5aが車両の右折又は左折の開始を検出した場合に、第一検出手段が所定領域に指向するように、第一検出手段の車両の車体の前方に対する第一角度θ1を制御する第一角度制御手段5cとを含むことを特徴とする。
(もっと読む)
検出装置

【課題】レーダによる物体検知範囲を広角範囲、または狭角範囲を切り替えて使用できるようにする。
【解決手段】アンテナ37−1は、電波を照射して送信信号を送信し、第1の間隔で1列ずつのアンテナが配置されたアンテナ51−2,51−3の対は、送信信号のうち、反射されてくる電波を受信し、第1の間隔よりも広い第2の間隔で、アンテナ51−1,51−2を1本のアンテナとし、アンテナ51−3,51−4を1本のアンテナとしたときのそれらの対は、送信信号のうち、反射されてくる電波を受信し、受信部12は、アンテナ51−2,51−3の対、または、アンテナ51−1,51−2とアンテナ51−3,51−4とをそれぞれ1本のアンテナとした対により受信された電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号をサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
レーダ装置
【課題】角度推定の精度やアンテナ感度を低下させることなく、ターゲットを検知可能な角度範囲を広くすることを課題とする。
【解決手段】アレーアンテナを有するレーダ装置1に、アンテナch1、ch2、ch6の何れかを送信アンテナとして電波を送信する送信部11と、アンテナch1−ch6を受信アンテナとして反射電波を受信する受信部12と、送信アンテナとして用いられるアンテナを、送信処理単位で切り替える制御部13と、を備え、アンテナch2−ch6は、隣接するアンテナに対して間隔dをおいて配置され、アンテナch1、ch2は、隣接するアンテナに対して間隔3/2dをおいて配置されることとした。
(もっと読む)
物体検出装置
【課題】路側物近傍を走行する車両の位置を正確に検出する。
【解決手段】物体検出装置1は、車両に搭載され、レーダセンサからなる第1センサ24とは相違するセンサである第2センサ21〜23を介して、該車両の周囲に存在する物体を検出する路側物検出部11と、路側物検出部11によって路側物が検出されているか否かを判定する判定部12と、判定部12によって路側物が検出されていると判定された場合に、第2センサ21〜23を介して、前記路側物の位置情報を取得する位置取得部13と、位置取得部13によって取得された前記路側物の位置情報に基づいて、第1センサ24を介して、前記路側物の近傍を走行する他の車両を検出する車両検出部14と、を備える。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】最小限のリソースで速度の分離精度を高めることの可能なレーダ信号処理装置を提供すること。
【解決手段】受信信号に対してドプラフィルタ処理部2により粗くドプラフィルタ処理を施し、各フィルタバンクにおける信号強度を用いた重心計算により、強度分布のピーク位置を得る。そしてこのピーク位置から特定したフィルタバンクにつき最小限の周波数レンジで再度、高精細のドプラフィルタ処理を施す。
(もっと読む)
車載表示装置
【課題】ヘッドライトの点灯が必要な走行時に、安全かつ快適に車間距離の確保を運転者に促すことが可能な車載表示装置を提供する。
【解決手段】車載表示装置1では、制御部10が、各センサ及びスイッチ類2〜6からの入力情報に基づいて各種処理を実行し、ピクセルライト7を介して、自車両に対する前方側の路面上に照明光を照射し、画像デバイス8を介して、ピクセルライト7の投射領域に、安全車間距離を表す指標画像を表示する。このため、安全車間距離を表す指標画像が車両前方の道路(実像)上に表示されるため、運転者の視線が車外前方から外れずに済むと共に、運転者の焦点が実像上の指標画像に合いやすくなり、例えば夜間や夕方におけるヘッドライト6の点灯が必要な走行時に、安全かつ快適に車間距離の確保を運転者に促すことができる。
(もっと読む)
レーダ装置
【課題】各探知距離領域において探知できない方位角範囲が広くならないようにできるレーダ装置を簡易且つ低廉な構成にて実現する。
【解決手段】送信部12は、同一種類の単パルス信号同士が一定の繰り返し周期となるように、複数種類の単パルス信号を特定の順で切り替えながら送信する。受信部15は、受信データ記憶部51とパルス積分部52とを備える。受信データ記憶部51は、種類毎のパルス応答データを時間的配列が認識できるように所定回数分記憶する。この際、新たなパルス応答データが入力されると、当該新たな応答データを含む新しい側の所定回数分のパルス応答データを保持するように更新記憶する。パルス積分部52は、同一種類のパルス応答データを新しいデータ側の特定個数分だけ読み出してパルス積分する。
(もっと読む)
車両用レーダ装置
【課題】受信波形と基準波形との差分に基づいて測距を行う際に、車両周囲の環境が変化しても正確な測距を維持可能とする。
【解決手段】受信波形サンプル部51で受信波形信号を所定時間間隔でサンプリングする。この受信波形のサンプリング間隔は、車速に応じて設定されることが望ましい。サンプリングされた受信波形信号は、基準波形取得部52で所定数集められて統計処理され、この統計処理された波形信号が基準波形信号として取得される。この統計処理による基準波形の取得は、車両走行中に繰り返して実行され、最新の基準波形で現在保持している基準波形が更新される。これにより、車両周囲の環境が変化しても正確な測距を維持することが可能となる。
(もっと読む)
車両用レーダ装置
【課題】アンテナの数を抑制しながら検出範囲を拡大する。
【解決手段】統括コントローラ2は、レーダ部3,4,5を制御してレーダ波を車両側部に送信させ、ターゲットで反射して受信されるまでの往復伝播時間をレーダ部3,4,5からの距離判定情報に基いて算出し、ターゲットの位置を特定する。その際、統括コントローラ2は、スイッチ6を介してアンテナTRx1,TRx2の送受信を切換え、アンテナTx1,TRx1間の領域R1と、アンテナTRx1,TRx2間の領域R2と、アンテナTRx2,Rx2間の領域R3との3つの領域を検出範囲として、アンテナの数を抑制しながら検出範囲を拡大する。
(もっと読む)
車両用物体検知装置のエイミング構造
【課題】 レーダー装置の軸線の方向を簡単な構造で左右方向に調整可能にする。
【解決手段】 レーダー装置Rは、その左側面が車体12に固定した第1ブラケット16Lの第1支持孔21Lに嵌合する第1偏心カラー22Lの第1ボルト孔23Lを貫通する第1ボルト24Lに螺合して支持されるとともに、その右側面が車体12に固定した第2ブラケット16Rの第2支持孔21Rに嵌合する第2偏心カラー22Rの第2ボルト孔23Rを貫通する第2ボルト24Rに螺合して支持される。第1、第2偏心カラー22L,22Rは前後を入れ換えて第1、第2支持孔21L,21Rに嵌合可能であり、かつ第1、第2偏心カラー24L,24Rの第1、第2ボルト孔23L,23Rは、その中央に対して前後方向に偏心しているので、第1、第2偏心カラー22L,22Rの向きを選択するだけで、レーダー装置Rの軸線の方向を左右方向に少なくとも3種類に調整することができる。
(もっと読む)
物体検知装置
【課題】 受信レベルが異なる二つのターゲットが並走しているとき、受信レベルが低い方のターゲットがゴーストターゲットであると誤判定されるのを防止する。
【解決手段】 ゴーストターゲット候補判定手段M5は、二つのターゲットの自車からの距離が同等であって受信レベル差が所定値以上の場合に、一方のターゲットが他方のターゲットのゴーストターゲット候補であると判定し、並走ターゲット判定手段M6は、二つのターゲットの自車からの距離変化に応じた角度差および左右位置差の変化に基づき、一方のターゲットが他方のターゲットの並走ターゲットであると判定し、ゴーストターゲット判定手段M7は、ゴーストターゲット候補のうちから並走ターゲットデータを削除したものをゴーストターゲットであると判定するので、ゴーストターゲットを精度良く判定しながら、並走ターゲットをゴーストターゲットと誤認するのを未然に防止することができる。
(もっと読む)
レーダ装置
【課題】レーダビームの上下左右方向の軸ずれ量を算出することができるレーダ装置を提供する。
【解決手段】レーダ装置1は、レーダ2と、このレーダ2と接続されたECU3とを備えている。ECU3は、レーダ2によって検出されたデータに基づいて、自車両と同一のレーンの直線路において前方正面を走行する先行車両を抽出する。そして、ECU3は、その先行車両について自車両に対する先行車両の距離及び上下左右方向がレーダ2によって所定回数検出された場合に、その所定回数検出されたデータに基づいてレーダビームの上下左右方向の角度ずれ量Δθx,Δθy(軸ずれ量)を算出する。
(もっと読む)
車両用異常診断装置、車両用異常診断方法、車両用異常診断装置付き車両
【課題】 制御処理手段の搭載数を少なくし、制御処理手段の異常を監視することができる車両用異常診断装置、車両用異常診断方法、車両用異常診断装置付き車両を提供すること。
【解決手段】 距離検出手段が検出した自車両と障害物との距離に基づき、制御処理手段の第2の演算周期を用いて自車両と障害物との相対速度を推定し、相対速度検出手段が検出した自車両と障害物との相対速度と、距離推定手段が推定した自車両と障害物との相対速度と、の差が設定値より大きい場合には、制御処理手段の演算周期が異常であると判定するようにした。
(もっと読む)
レーダ画像処理装置
【課題】移動体に搭載されたレーダで所定領域を観測し、対象物を検出する時、従来は対象物の高度情報と反射強度を用いていたので、高度と反射強度が同程度の建物や車両等は区別できない。
【解決手段】所定領域内の対象物体までの距離と、そのアジマス方向とエレベーション方向の角度のデータを取得データ入力手段で取得し、取得データから3D画像作成処理手段で3次元画像を生成し、3次元画像中の所定領域を領域設定処理手段で抽出し、所定領域の画像データを用いて、高度断面図作成手段で高度断面図を作成し、高度断面図に検出対象物体が存在するかの判定を物体判定処理手段で行い、検出対象物体が存在する位置を表示手段が表示出力する。
(もっと読む)
FMCWレーダ位置決め装置の拡散損失源による感度損失を検出する方法
本発明は、
FMCWレーダ位置決め装置の、拡散損失源(30)による感度損失を検出する方法であって、送信信号がレーダ位置決め装置により発せられ、送信信号の周波数は、連続する変調ランプにおいて周期的に変調され、レーダ位置決め装置により受信される信号の少なくとも1つの周波数部分の少なくとも1つの性能特性が評価される、上記方法において、送信信号の電力が周期的に、変調ランプの終了後ごとに変更され、感度損失が、同じ変調の連続する変調ランプにおいて受信される信号の性能特性の違いを用いて決定される方法に関する。
(もっと読む)
センサ装置
【課題】人などの物体の有無をドップラセンサを用いて判定するセンサ装置の判定精度を向上することが可能な技術を提供する。
【解決手段】センサ装置100は、ドップラセンサ1と、A/D変換器2と、離散フーリエ変換部3と、算出部4と、判定部5とを備えている。A/D変換器2は、ドップラセンサ1から出力されるドップラ信号S1をディジタル信号に変換して出力する。離散フーリエ変換部3は、A/D変換器2の出力信号S2に対して離散フーリエ変換を行って、当該出力信号S2を周波数領域の信号に変換して出力する。算出部4は、離散フーリエ変換部3の出力信号S3から所定の複数の周波数成分を抽出し、当該複数の周波数成分の電力の総和を算出する。判定部5は、算出部4で算出された複数の周波数成分の電力の総和に基づいて、検出対象物の有無を判定する。
(もっと読む)
車両のための運転者支援システム内の角度分解型レーダセンサにおける着氷を検出する方法
本発明は、車両のための運転者支援システム内の角度分解型レーダセンサ(10)における着氷を検出する方法であって、それぞれが特別な角度特性を有する複数のアンテナ素子(16)の信号が、対応する角度特性と比較され、アンテナ素子の信号が所定の方位角についてどのくらい良好に角度特性と一致するかを示す角度適合度(G)を用いて、測定物体の方位角(φ)が決定される、上記方法において、着氷についてのインジケータ(I)が形成され、上記インジケータ(I)は、測定物体の角度適合度(G)の単調減少関数であり、信号対雑音比が低い物体が、インジケータ(I)に対して、最大でも、低減された重み付けにより影響を与えることを特徴とする、方法に関する。 (もっと読む)
物体検出装置
【課題】物体の向きに適応した物体の輪郭検出を行うことにより物体の検出精度を高められる物体検出装置を提供すること。
【解決手段】物体の検出を行う物体検出装置であって、LIDAR2により物体の検出点pを検出し、物体の向きをカメラ3によって検出し、物体の向きに応じて輪郭検出用のテンプレートを選択し、そのテンプレートをLIDAR2により検出された検出点pの点列Pに当てはめて物体の輪郭を検出する。これにより、物体の向きに適応した形状のテンプレートを用いて物体の輪郭を検出することができるため、物体の輪郭を適切に検出して物体の検出精度を高めることができる。
(もっと読む)
車両検出装置、車両検出方法、および車両検出プログラム
【課題】 道路上や道路側面に複数のセンサを設置して高精度に車両の検出を行う車両検出装置を提供する。
【解決手段】
本発明は、複数のセンサを融合して車両を検出する車両検出装置に関し、物体の形状を測定するのに適した第1のセンサと、物体との距離を測定するのに適した第2のセンサを用い、第2のセンサで検出された車両位置を基準として、その前後に車両の検出結果を無効とする棄却範囲が設けられた棄却範囲テーブルを参照し、第1のセンサによる検出結果の採用の可否を判定し、第1のセンサ及び第2のセンサの各検出結果を融合して出力することを特徴とする。
(もっと読む)
物体検出装置
【課題】反射強度が低い物標を精度良く移動物体として検出することが可能な物体検出装置を提供する。
【課題手段】物体検出装置1では、ミリ波レーダ2により、左側方及び右側方に電磁波が照射され、その反射強度の分布から複数の物標が検出され、レーダ用ECU1により、自車両が走行するレーンに左側及び右側のそれぞれに隣接するレーンの有無が判定され、隣接レーンの有無に応じた抽出条件により、左側及び右側のそれぞれにおいて検出された物標から移動物体を抽出する。隣接レーンの有無により移動物体の抽出条件が変更されるので、反射強度が比較的低い二輪車や反射強度が高い四輪車を精度良く抽出することが可能となる。
(もっと読む)
221 - 240 / 1,037
[ Back to top ]