
Fターム[5J070AF06]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 航空機 (279)
Fターム[5J070AF06]に分類される特許
81 - 100 / 279
画像処理装置及び無線通信装置及び画像処理方法及び画像処理プログラム
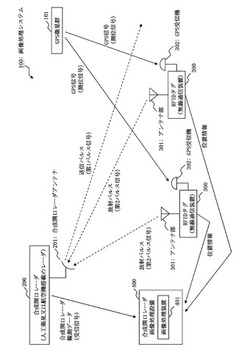
【課題】能動的に電波を放射する無線通信装置を利用しつつ、無線通信装置を利用しない場合と同様の地上のレーダ画像を得て、無線通信装置の位置に基づき、レーダ画像を高精度で補正する。
【解決手段】合成開口レーダ200はチャープ変調した送信パルスをパルス繰り返し間隔PRIごとに送信し、地上で反射した信号を受信信号として受信する。RFIDタグ300はチャープ変調した放射パルスを別のパルス繰り返し間隔PRI’ごとに送信し、受信信号の一部として合成開口レーダ200に受信させる。画像処理装置401は、受信信号をパルス繰り返し間隔PRIごとにレンジ圧縮する等により通常の地上のレーダ画像を再生する。また、受信信号をパルス繰り返し間隔PRI’ごとにレンジ圧縮する等によりRFIDタグ300が映った画像を再生し、この画像とRFIDタグ300の位置情報とに基づいて地上のレーダ画像を補正する。
(もっと読む)
ポラリメトリSAR装置及びポラリメトリSARデータを用いる目標物同定方法

【課題】地物の向き及び撮像方向による影響を軽減させながら、撮像された地物を任意の形状のものと定量的に同定する。
【解決手段】提供されるポラリメトリSAR装置は、第1の基底変換処理部19が撮像された地物のフルポラリメトリデータに基づいて第1のフルポラリメトリ複素画像を算出し、第2の基底変換処理部20が既知の地物のフルポラリメトリデータに基づいて第2のフルポラリメトリ複素画像を算出する。強度変換処理部23とフィルタ処理部27を経由した第1のフルポラリメトリ複素画像と、強度変換処理部24とフィルタ処理部28を経由した第2のフルポラリメトリ複素画像は、類似度算出処理部31によって類似度が算出される。類似度算出処理部31は、算出された類似度rの値が所定値より高いときに撮像された地物を既知の地物によって定量的に同定する。
(もっと読む)
車両速度計算装置及び車両速度計算方法及び車両速度計算プログラム
【課題】レーダの観測データから車両の速度を高精度で求める。
【解決手段】車両速度計算装置100において、車両検出部103は、合成開口レーダ(SAR)によって、道路が敷設された地域を観測し、その結果として得られたレーダ画像201から、道路の近傍に存在する車両を検出する。ドップラシフト量推定部104は、道路301の位置と車両検出部103が検出した車両のレーダ画像201における位置との間の距離に基づいてドップラシフト量を推定する。速度計算部105は、ドップラシフト量推定部104が推定したドップラシフト量を車両検出部103が検出した車両の速度へ換算する。
(もっと読む)
画像レーダ装置及び信号処理装置
【課題】レーダの移動に伴いレーダビームの照射方向を変化させる複数ビーム観測方式を実現する画像レーダ装置及び信号処理装置を得る。
【解決手段】同一または異なるプラットフォームに送信アンテナ及び複数の受信アンテナを搭載する画像レーダ装置であって、前記送信アンテナ及び複数の受信アンテナは、レーダの移動に伴いレーダビームの指向方向を変化させながら観測する。また、送受信アンテナ間隔の2乗をレーダ波長と観測対象領域のレンジとの積の2倍で割ったものに円周率を乗じた位相を持つ複素関数が1とみなせるように、送受信アンテナ間隔、レーダ波長、観測対象領域までのレンジを設計する。
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム
【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分と体積散乱成分とヘリックス散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分と体積散乱成分とヘリックス散乱成分とのうち1種類以上の散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
レーダ装置
【課題】複数の異なる観測形態について同時に観測することを可能にしたレーダ装置を提供する。
【解決手段】相関処理のための観測モード毎に異なる信号系列情報を生成する制御手段(1)と、各観測モード毎に前記信号系列情報に従ってパルス毎に位相を0またはπに切替えたパルスのチャープ信号による照射波を生成し、観測方向に照射し、対象物からの反射波を受信するアンテナ手段(2,3,4,5,6)と、前記アンテナ手段で受信された信号を各観測モード毎にそれぞれの前記信号系列情報で相関処理を行いそれぞれの信号のみを圧縮する相関処理手段(7)と、各観測モード毎の相関処理の施された信号に画像処理を行ってそれぞれの観測モードの画像を生成する画像処理手段(8)と、を備えた。
(もっと読む)
レーダ画像処理装置
【課題】移動体に搭載されたレーダで所定領域を観測し、対象物を検出する時、従来は対象物の高度情報と反射強度を用いていたので、高度と反射強度が同程度の建物や車両等は区別できない。
【解決手段】所定領域内の対象物体までの距離と、そのアジマス方向とエレベーション方向の角度のデータを取得データ入力手段で取得し、取得データから3D画像作成処理手段で3次元画像を生成し、3次元画像中の所定領域を領域設定処理手段で抽出し、所定領域の画像データを用いて、高度断面図作成手段で高度断面図を作成し、高度断面図に検出対象物体が存在するかの判定を物体判定処理手段で行い、検出対象物体が存在する位置を表示手段が表示出力する。
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム
【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた2偏波観測あるいは4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
レーダシステム
【課題】単体で方位の異なる複数目標の同時観測を行い、各目標の高分解能画像を取得できるレーダシステムおよび信号処理方法を提供する。
【解決手段】航空機11が観測目標4を追尾し画像化するシステムにおいて、ビーム12を次々に切替えながらLPRF以上のパルスを送信する。すなわち、現状では送信した後ずっと目標方向を見ていたビーム12を、他方位の観測目標にも向けて観測を行う。ISAR画像解析において、本当に必要なのは観測目標4からの反射波だけであるので、受信ゲート14を開くタイミングを制御することで、受信ゲート14を従来の1目標あたりのPRI17よりも十分に小さくすることができる。このように、ビーム制御機能とタイミング制御機能を付加することで、多方位の複数の目標を同時に観測することができる。
(もっと読む)
レーダ信号処理装置とその目標判定方法
【課題】低S/N環境下においても目標を識別し距離や速度を特定することができるようにする。
【解決手段】目標11からの反射波はアンテナ1から取り込まれ、受信器2で受信される。受信された信号はA/D変換器3でデジタル信号に変換されて目標検出器4で信号処理されて、目標航跡の仮データが求められる。目標検出器4では、デジタル信号に変換された信号をフーリエ変換し、複数回分取り込んで、ハフ変換やTBDアルゴリズムなどの方法によって目標と思われる航跡を抽出し、これを目標航跡仮データとする。この目標航跡仮データは、観測毎の距離のデータ列および速度のデータ列であり、目標判定処理器5に送られる。この目標判定処理器5は、観測毎に得られる目標航跡仮データから目標の航跡を判定し、単一の目標と判定されたときはこの目標の航跡情報とすることで、真の目標航跡データを求める。
(もっと読む)
レーダ信号処理装置
【課題】目標物の検出状況に応じて目標物の検出能力を可変とし、通常の検出処理では検出できない、より小さな目標物を検出できるレーダ信号処理装置を得る。
【解決手段】目標物で反射した受信信号を受信し、受信データを出力する受信部2と、受信データに対して積分処理を実行し、積分データを出力するFFT部31、積分データを記憶する現結果保持部32および前結果保持部33、並びに追加積分要求に応じて、新たな積分データを算出する位相整合部34および合算部35を有する積分部3と、積分データのピーク位置を検出し、積分データとともに出力する検出部4と、ピーク位置および積分データに基づいて、目標物までの距離および目標物との相対速度の少なくとも一方を算出する状態算出部5と、検出部4で検出されたピーク位置の数が所定値よりも少ない場合に、積分部3に対して追加積分要求を出力する追加積分判定部6とを備えている。
(もっと読む)
レーダによって測定された乱流強度を垂直ディスプレイ上に表示するためのシステムおよび方法
【課題】レーダによって測定された乱流強度を垂直ディスプレイ上に表示するためのシステムおよび方法を提示すること。
【解決手段】気象レーダ検出システムおよび方法は、乱流領域(112、114、116)の強度の垂直図(602)を表示するように動作可能である。一例示的実施形態は、乱流を検出するように動作可能なレーダ(210)と、検出された乱流の位置および強度を決定するように動作可能な処理システム(212)と、航空機(104)に対する固有の地理位置と結合した複数のボクセルからなる三次元(3−D)気象情報データベース(236)であって、乱流強度に対応する情報が記憶されている三次元(3−D)気象情報データベース(236)と、選択された垂直スライス(306)の垂直図を表示するように動作可能なディスプレイ(222)であって、決定された乱流強度および決定された乱流の位置がこの表示される垂直図(602)によって表示されるディスプレイ(222)とを有している。
(もっと読む)
フィードスルー補償装置、フィードスルー補償型アンテナ、レーダ装置およびフィードスルー補償値計測方法
【目的】本発明は、フィードスルー補償装置、フィードスルー補償型アンテナ、レーダ装置およびフィードスルー補償値計測方法とに関し、広い温度範囲に亘って、容易かつ安定にフィールドスルー量を十分に小さな値に維持できることを目的とする。
【解決手段】送信系および受信系に接続され、かつ送信系から受信系に送信波の一部を直接伝達するパスを有する系において、パスに並設され、かつ送信波の一部が受信系に入力されるレベルを抑圧する伝達特性を有する並設パスと、並設パスの温度を計測する温度計測手段と、送信波の周波数帯でパスの減衰量が所定の閾値以上となるために、伝達特性が補償されるべき量を含むパラメータが並設パスが作動し得る温度に対応づけられて予め記憶された記憶手段と、温度計測手段によって計測された温度に対応づけられて記憶手段に記憶されているパラメータを用いて伝達特性の偏差を補償する制御手段とを備える。
(もっと読む)
目標検出装置及び目標検出方法
【課題】目標検出精度を向上させることができる目標検出装置を得る。
【解決手段】赤外線カメラ8の画像データを温度領域毎に分割し、レーザ測距器9の距離から各温度領域の角度と距離を求める画像処理器10と、互いに直交する偏波特性を有する二つのアンテナ1、2のうち、送信ではいずれか一方、受信では双方を駆動させ、観測対象のレーダ信号を収集する偏波切替器3と、レーダ信号を分解能セル毎に散乱ベクトルとして格納する観測散乱ベクトル蓄積器7と、求めた温度領域毎の角度と距離を用いて、対応する散乱ベクトルの分解能セルを抽出し、散乱ベクトルを温度領域毎に分割するレーダ信号分割器11と、温度領域毎に分割された散乱ベクトルからフィルタの生成を行い、フィルタを温度領域内の各分解能セルに適用処理を行い、温度領域毎に電力を出力するノッチフィルタ回路12と、電力を閾値と比較して目標とクラッタの判別を行う閾値回路13とを設けた。
(もっと読む)
レーダー画像を使用して航空機の位置を求めるシステム及び方法
【課題】GPS信号を使用して正確に位置を求めることができない状況、又はGPS信号が利用可能でない状況において、航空機の位置を求める代替的なシステム及び方法を提供する。
【解決手段】航空機の位置を求めるように動作可能な測位システム及び測位方法。例示的な一実施の形態は、搭載メモリ116内に格納される事前捕捉画像202内の、既知の位置によって規定される少なくとも1つの物体を特定し、現在のレーダー画像302内の少なくとも1つの地上物体を特定し、現在のレーダー画像302内で特定された地上物体を、事前捕捉画像202内で特定された物体と相関付け、設置車両と事前捕捉画像202内の特定された物体との間の相対位置を求め、且つ事前捕捉画像202内の特定された物体の既知の位置と、求められた相対位置とに基づいて設置車両の位置を求める。
(もっと読む)
ネットワークレーダシステム
【課題】 より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ること。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
(もっと読む)
二次監視レーダ装置及び二次監視レーダ装置によるモノパルス測角方法
【課題】構成を簡略化することができる二次監視レーダ装置を提供する。
【解決手段】二次監視レーダ装置1は、受信した信号から生成されるΣ信号SΣを振幅情報Σa及び位相情報Σpを含むLog増幅信号SΣLogに増幅するLog増幅器41と、Log増幅信号SΣLogをデジタル信号SΣdにデジタル変換するA/D変換器42とを有するΣ信号処理部32と、受信した信号から生成されるΔ信号SΔを振幅情報Δa及び位相情報Δpを含むLog増幅信号SΔLogに増幅するLog増幅器51と、Log増幅信号SΔLogをデジタル信号SΔdにデジタル変換するA/D変換器52とを有するΔ信号処理部33と、振幅情報Σa、位相情報Σp、振幅情報Δa及び位相情報Δpから航空機91の方位角度θを演算するモノパルス演算部37とを備えている。
(もっと読む)
パルス圧縮レーダ装置
【課題】 従来のパルス圧縮レーダ装置では、HPRFモードとMPRFモードにおいてレンジのアンビギュイティが存在するため、マルチPRFレンジングやFMレンジングを適用していたが、スキャン速度の低下やレンジ精度の限界といった問題があった。
【解決手段】 HPRFモードとMPRFモードにおいて、パルス圧縮用のパルス内位相変調と同時に、符号変調によりパルス間位相変調を施すことにより、一意にレンジを特定することができる。
(もっと読む)
アクティブフェーズドアレイレーダ
【課題】空中線モジュールにおける出力の制約を解消してより高い電力の出力を可能にすることで、状況に応じてより有効なアンテナビームを形成できるアクティブフェーズドアレイレーダを提供する。
【解決手段】空中線モジュール20において送信用可変減衰器6aを電力増幅器7の入力側に配置することで出力の制約を解消しより高い電力の出力を可能にし、制御装置8が、各空中線モジュール20の電力増幅器7、可変減衰器6a,6bおよび回路切換え機構2〜4を制御してアンテナ開口面での波源分布特性を、送信時には均一分布特性又は密度テーパ分布特性に切換え、受信時には均一分布特性又は振幅テーパ分布特性に切換える。
(もっと読む)
目標検出装置
【課題】変調パルス信号による受信障害を回避することができる目標検出装置を提供すること。
【解決手段】レーダ装置10は、電界強度マップを生成する電界強度マップ生成部17と、電界強度閾値のデータを保持する閾値データ保持部18と、電界強度マップのデータと電界強度閾値のデータとを比較して受信障害の可能性の有無を示す受信障害マップを生成する受信障害マップ生成部19と、受信障害マップに基づき、変調パルス信号の進行方向が受信障害の発生の可能性が有る領域と重なった場合、今次の変調パルス信号の発射において受信障害が発生する可能性が有る旨を示す信号を出力する受信障害判定部20と、レーダ装置10から目標までの距離に応じて変調パルス信号の送信電力を設定するための指示を行う変調諸元指示部21とを備える。
(もっと読む)
81 - 100 / 279
[ Back to top ]