
Fターム[5J070AF07]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | ミサイル (61)
Fターム[5J070AF07]に分類される特許
21 - 40 / 61
レーダ信号処理装置とその目標判定方法
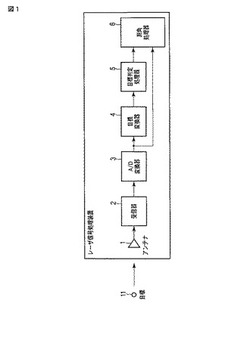
【課題】低S/N環境下においても目標を識別し距離や速度を特定することができるようにする。
【解決手段】目標11からの反射波はアンテナ1から取り込まれ、受信器2で受信される。受信された信号はA/D変換器3でデジタル信号に変換されて目標検出器4で信号処理されて、目標航跡の仮データが求められる。目標検出器4では、デジタル信号に変換された信号をフーリエ変換し、複数回分取り込んで、ハフ変換やTBDアルゴリズムなどの方法によって目標と思われる航跡を抽出し、これを目標航跡仮データとする。この目標航跡仮データは、観測毎の距離のデータ列および速度のデータ列であり、目標判定処理器5に送られる。この目標判定処理器5は、観測毎に得られる目標航跡仮データから目標の航跡を判定し、単一の目標と判定されたときはこの目標の航跡情報とすることで、真の目標航跡データを求める。
(もっと読む)
姿勢計算装置及び誘導装置及び姿勢計算装置の姿勢計算方法及び姿勢計算装置の姿勢計算プログラム

【課題】目標物周辺の地面の傾斜を正確に検出することができ、斜面に設定された目標物に対して予め想定された姿勢角で正確に到達することのできるように計算する姿勢計算装置を提供する。
【解決手段】目標座標取得部121が目標の2次元の位置座標である目標座標20を取得し、DEMデータベース122が所定の領域内における複数の点の標高情報を含む3次元位置座標を記憶し、傾斜算出部123がDEMデータベース122に記憶された3次元位置座標の中から、目標座標取得部121により取得された目標座標近傍の複数の3次元位置座標を目標周辺DEMデータ21として取得し、傾斜算出部123が複数の目標周辺DEMデータ21に基づいて、目標の周囲の領域の傾斜角22を処理装置により算出し、姿勢角計算部124が傾斜算出部123により算出された傾斜角22に基づいて、飛翔体の目標に対する姿勢を制御するための飛翔体の姿勢角23を計算する。
(もっと読む)
飛翔体
【課題】比較的近距離の計測制度を確保しつつ装置構成を小型化する。
【解決手段】目標物までの距離を計測しつつ飛翔する飛翔体であって、目標物に対して第1の距離に接近するまではFM−CW方式に基づいて目標物との距離を計測し、第1の距離から第2の距離までの間はCW方式によって得られたビート信号に基づいて目標物との距離を計測する距離計測部を備える。
(もっと読む)
電波・光波探知装置
【課題】この発明は、簡易な構成で、且つ、電波及び光波の双方の高精度な検知を実現して、探知性能の向上を図り得るようにすることにある。
【解決手段】二軸回りに回動自在に配したジンバル枠10の開口に電波検知系を形成するアンテナ12及び光波検知系を形成するリング状光学系11を同軸的に設けて、アンテナ12の背面側にリング状光学系11で取込んだ光波を集光する光学系17と共に、第1及び第2の光波検知器18,19を配し、電波及び光波の双方を検知するように構成したものである。
(もっと読む)
飛しょう体の誘導装置
【課題】飛しょう体ロール時の空間安定性の劣化を改善したAZEL切替測角方式の飛しょう体の誘導装置を提供する。
【解決手段】1回目の第1の方向の誤差角の検出と2回目の第1の方向の誤差角の検出の間に、1回目の第2の方向の誤差角の検出と2回目の第2の方向の誤差角の検出を行い、1回目に検出した第1の方向の誤差角と2回目に検出した第1の方向の誤差角との相加平均を基準時間Tにおける第1の方向の誤差角とし、1回目に検出した第2の方向の誤差角と2回目に検出した第2の方向の誤差角との相加平均を基準時間Tにおける第2の方向の誤差角とする。
(もっと読む)
全てディジタルの見通し線(LOS)プロセッサアーキテクチャ
全てディジタルの見通し線(LOS)プロセスアーキテクチャは、セミアクティブ又はアクティブなパルス化された電磁(EM)ターゲット指定システムにおいて使用する受信機の、サイズと、重量と、電力と、性能の制約に対処している。全てディジタルのアーキテクチャは、広い視野にわたる高感度のパルス検出と、適応パルス検出と、LOSの処理と、対策とに対する向上した技術のためのプラットフォームを提供する。 (もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、マルチパス環境下で安定した追尾を行うため、誘導信号に重畳するノイズ成分を、ハイパスフィルター、ピークホールド回路等による補正を実施していたが、シンチレーション等により目標のS/Nが劣化した場合、マルチパスによる虚像からの反射波が支配的となり、虚像に誤ロック及び誤追尾するという問題があった。
【解決手段】 マルチパス判定部を備え、アンテナを振りながら目標と虚像の両方を受信し、アンテナ角度とロックオンフラグをマルチパス判定部に入力する。マルチパス判定部では、下方向から受信する信号を虚像と判定し、キャンセルする。これにより、マルチパスによる虚像に誤ロックする問題点を解消する。
(もっと読む)
レーダ装置
【課題】従来のビート周波数の対応付け方法では、目標の探知状況がアップチャープ時とダウンチャープ時で異なりビート周波数のピーク数が合わない場合においては、ビート周波数の対応付けが正確に行えない状況が発生する。
【解決手段】FMCW信号を送信する送信手段1と、受信信号と送信信号とからビート信号を生成する受信手段2と、ビート信号のビート周波数分布を求めるビート周波数生成手段3と、ビート周波数の追尾処理を行うアップチャープ用ビート周波数追尾手段4とダウンチャープ用ビート周波数追尾手段5と、ビート周波数時系列データから目標の距離及び距離変化率を算出するアップチャープ用目標検出手段6とダウンチャープ用目標検出手段7とを設けた。
(もっと読む)
誘導装置
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から反射してきた信号を受信することにより目標信号を検出して追尾するが、目標信号以外に妨害機から送信されたECM信号を受信した場合には、ECM信号を目標信号であると誤認識し、目標ではなくECM信号を追尾することがあった。
【解決手段】 水平偏波及び垂直偏波を同時受信する偏波共用アンテナと偏波検出処理を有し、水平偏波及び垂直偏波の受信信号の電力レベルを比較することにより、誘導装置が目標信号を検出する際に目標からの反射信号とECM信号を識別して、安定して目標を追尾することを可能にするものである。
(もっと読む)
誘導装置
【課題】 自らは電波を放射せずにレーダなどの電波源からの電波を受信して、この受信信号に対して追尾する誘導装置において、継続的に電波を受信できるかどうかは電波源の挙動次第であり、目標が消失し追尾が継続できない場合がある。目標が消失した要因としては、電波源が周波数を変更し受信帯域幅外の周波数になった可能性や、レーダのスキャン周期の影響で受信電力が低下している可能性等が考えられるが、前者、後者を同時に捜索することが非常に困難である。
【解決手段】 SUM系受信帯域とDIF系受信帯域を別々に制御することで、異なる周波数帯域を同時に捜索することを可能とする。これにより、電波源からの電波放射状況の影響が軽減され捜索性能が向上するとともに、追尾時間が長くなることになるため、誘導性能の向上が可能となる。
(もっと読む)
ウェイト算出方法、ウェイト算出装置、アダプティブアレーアンテナ、及びレーダ装置
【課題】 パルスレーダ装置において、受信信号の位相及び振幅に対するウェイトをスライディングウィンドウ方式によって計算するための共分散行列データの導出に要する計算量を軽減する。
【解決手段】 受信データ蓄積状況を監視し(ステップS1)、iが1からLになるまで、第i番目のレンジセルの共分散行列Ri を算出して一時保存する(ステップS2〜S5)。次に、iが1からTになるまで、該当トレーニングサンプル数分の共分散行列データRi を呼び出し、足し込んで平均をとり、その平均共分散行列データR[1]rrを一時保存する(ステップS6〜S10)。続いて、iが2からLになるまで、平均化された共分散行列データR[i-1]rrを呼び出し、R[i-1]rrにRi ,Ri-4を足し込み、R[i-1]rrからRi+3 ,Ri-1を差し引いて、その結果のR[i]rrデータを一時保存し(ステップS11〜S16)、一連の処理を終了する。
(もっと読む)
走査型測距測角センサ用データ処理装置
【課題】処理能力の制約や移動体の運動や動揺に関わらず移動体と対象物間の相対距離と相対姿勢を高速,高精度に取得する。
【解決手段】開示される走査型測距測角センサ用データ処理装置は、受信強度信号10と距離計測信号11とAZ角度計測信号12を生成する2軸駆動型測距/測角センサ1と、有効強度信号14と有効距離信号18と有効AZ角度信号19と有効EL角度信号20を生成するデータ切り出し処理器2と、データインデックス信号15を生成する有効データ2値化処理器3と、データ集中度インデックス信号16を生成するデータ集中度判定処理器4と、グループ化データインデックス信号17を生成するデータグルーピング処理器5と、ターゲット距離信号21とターゲットAZ角度信号22とターゲットEL角度信号23とグループデータ個数信号24を生成するターゲット抽出/距離・角度生成器6と、その各信号を格納する測距/測角データ格納メモリ7を備える。
(もっと読む)
レーダ装置および受信レベルの補正方法およびプログラム
【課題】周囲温度の変化に影響されない、小型・軽量、低消費電力、高感度であるレーダ装置および受信レベルの補正方法を実現する。
【解決手段】送信機からアンテナを介して空中に放射されるべき電波の一部が受信機側に回り込んで発生する送信信号の漏れの強度に応じて受信信号のレベルを補正する受信レベル補正手段を備える。
(もっと読む)
目標追尾誘導装置及び方法
【課題】太陽光及び太陽クラッタ光の影響を低減して、シーカが安定した強度の反射光を検出することができ、これにより、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用上の制限を無くすことができる目標追尾誘導装置及び方法を提供する。
【解決手段】目標1に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標を捕捉し、目標方向に向けて飛翔体14を飛翔させる。飛翔体14は、赤外線シーカ16の前面に設けられた直線偏光子17(偏光フィルタ)と、直線偏光子17を透過可能な直線偏光の偏光方向を送信する送信装置18とを有する。さらに、レーザビーム照射装置12で発生するレーザビーム2の直線偏光の偏光方向をレーザビームのまわりの回転可能な偏光方向回転装置20と、回転後のレーザビーム3の偏光方向を飛翔体の偏光方向に一致させる偏光方向制御装置24とを備える。
(もっと読む)
協調型飛翔体システム
【課題】同時に複数で飛来する目標の中から対象目標を特定した上で、これら対象目標に対して効果的に対処することのできる協調型飛翔体システムを得る。
【解決手段】電波により目標を検知する電波飛翔体と、光波により目標を検知する光波飛翔体とが互いに通信可能な範囲を飛翔しながら、電波飛翔体は、探知した目標の中から対処の対象となる目標候補を抽出して光波飛翔体に通知し、光波飛翔体は、この通知に基づき目標候補を詳細に観測して対処の優先度を評価した上で自身の対処すべき目標を特定し、この目標に向けて誘導飛翔する。一方、電波飛翔体も、光波飛翔体による目標候補に対する評価結果の通知を受けて自身の対処すべき目標を特定し、この目標に向けて誘導飛翔する。
(もっと読む)
追尾装置
【課題】高精度で測角して追尾性能を向上させることができる追尾装置を提供する。
【解決手段】空中線6と、空中線からのモノパルスビームを用いて行われる通常アンテナ開口によるモノパルス測角により、目標を所定の角度範囲に追尾するモノパルス測角処理部101と、モノパルス測角処理部により所定の角度範囲に追尾された目標を、空中線からのモノパルスビームを用いて行われる合成開口によるモノパルス測角により高角度分解能で追尾する高角度分解能処理部102を備えたことを特徴とする。
(もっと読む)
合成開口レーダ装置
【課題】飛翔経路方向の3次元空間に存在する目標を高分解能かつ高精度で観測して追尾することができる合成開口レーダ装置を提供する。
【解決手段】 飛翔体に搭載される合成開口レーダ装置であって、飛翔体の飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標を含む画像を生成する合成開口レーダ処理部1〜8と、合成開口レーダ処理部により生成された画像に含まれる目標が最小になるよう飛翔経路中心を設定する飛翔経路中心設定部9と、飛翔経路中心設定部で設定された飛翔経路中心と目標の中心とが一致するように飛翔体を誘導する誘導制御部10を備えている。
(もっと読む)
移動目標検出装置
【課題】演算処理規模の増加を抑えつつ、結像度の高いSAR画像を得ることができる移動目標検出装置を提供する。
【解決手段】合成開口を分割するマルチルック処理によって得られた複数の画像間の差を用いた移動目標検出処理により移動目標存在領域を抽出し、該抽出した移動目標存在領域のマルチルック間の移動ベクトルとマルチルック間の観測時間差とにより速度ベクトルを算出し、該算出した速度ベクトルに基づきクロスレンジ方向の参照信号の補正値を算出する補正値処理部5と、補正値処理部で算出された補正値を用いて補正された参照信号を生成する参照信号処理部6と、参照信号処理部からの補正された参照信号を用いて移動目標存在領域に対する合成開口画像を算出し、この合成開口全体の合成開口画像と合成する処理部1〜4、7を備える。
(もっと読む)
アンテナ装置
【課題】広角にビーム形成する場合であっても、構造上の問題を緩和しつつ、アンテナ素子パターンによるビームの利得低下を抑えることができるアンテナ装置を提供する。
【解決手段】アンテナ素子パターンの指向性が、アンテナ開口面に垂直な方向からビームを走査する範囲内で所定角度だけ傾いた所定方向に向くように配列された複数のアンテナ素子11〜1Nと、複数のアンテナ素子から送られてくる受信信号に基づきビーム合成する合成回路2を備える。
(もっと読む)
FMCW方式合成開口レーダ、偏流角検出方法、プログラムおよび記憶媒体
【課題】GPS/INSや角度計測可能な高級なGPSシステムなどの高価な姿勢センサを併用することなく、偏流角を簡単に取得することが可能なFMCW方式合成開口レーダを提供する。
【解決手段】FMCW方式合成開口レーダを搭載した飛翔体の偏流角を検出するための偏流角検出信号として、FMCW信号の送信頻度に比して十分に低い頻度で、偏流角検出信号送信部2から予め定めた一定周波数の連続信号であるCW信号をFMCW信号の間に挿入して送信し、または、偏流角検出信号送信部2AからFMCW信号に比し十分に小さい周波数傾きを有する三角状の信号からなるUP信号・DOWN信号を送信し、ターゲットにて反射された受信信号の中から、FMCW信号の間に挿入されたCW信号またはUP信号・DOWN信号の受信信号を抽出して、偏流角算出部12、12Aにて飛翔体の偏流角を算出する。
(もっと読む)
21 - 40 / 61
[ Back to top ]