
Fターム[5J070AH35]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フーリエ変換を行なうもの(DFT、FFT、IFFT) (880)
Fターム[5J070AH35]に分類される特許
861 - 880 / 880
目標検出システム
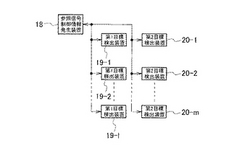
【課題】時間的に振幅が大きく変化し、振幅の大きな期間が短い受信信号のSN比を改善して目標検出性能を向上および小規模化が可能な目標検出システムを提供する。
【解決手段】目標検出装置19−1〜19−l、20−1〜20−mは、送信波の反射波を受信して得られた受信信号をデジタルビデオ信号に変換する受信機4と、受信機の出力信号から不要波成分を抑圧する不要波抑圧装置9と、不要波抑圧装置の出力信号に対し、検出対象とする目標からの受信信号のパルス毎の複素共役となり且つ積分利得を最大にできるパルス方向の長さを有する参照信号とを畳み込み演算する畳み込み演算装置10−1〜10−nと、畳み込み演算結果に基づき目標を検出する検出装置8−1〜8−nとを備え、参照信号制御情報発生装置18は、目標検出装置の畳み込み演算装置に対し畳み込み演算に使用する参照信号の種類を指示する。
(もっと読む)
物標検出装置

【課題】 割り込み物標を高速に検知することが可能な物標検出装置を提供することを目的とする。
【解決手段】 この物標検出装置は、遠距離狭角検出範囲R1を有する第1レーダ100aと、遠距離狭角検出範囲R1に部分的に重複する近距離広角検出範囲R2を有する第2レーダ100bとを備えている。範囲設定手段としてのレーダ100aは、近距離広角検出範囲R2であって且つ遠距離狭角検出範囲R1でない非重複検出範囲R2a内において、第2レーダ100bの出力のノイズレベルが上昇した場合には、このノイズレベル上昇した検出範囲R2aに隣接する遠距離狭角検出範囲R1内の領域Rxを重点的検出範囲に設定して物標検出を行う。
(もっと読む)
電波監視装置
【課題】 音声信号を高い精度で検出し、除去する電波監視装置を提供する。
【解決手段】 変換手段141が離散化された各受信信号を周波数領域の各信号に変換する。算出手段142が複数の変換された信号の大きさの最も大きい信号からm個(mは自然数:m=1,2,・・・)の信号のm個の周波数値を算出する。算出手段144が複数の変換された信号の大きさの最も大きい信号からn個(nは自然数かつn>m)の信号のn個の周波数値を算出する。統計値算出手段143、145、146がm個の周波数値を基にした第1の統計値とn個の周波数値を基にした第2の統計値を算出する。判定手段147が第2の統計値から第1の統計値を引いた値がある値よりも大きい場合に複数の変換された信号は音声信号であると判定する。分析手段が音声信号でないと判定された信号の分析を行う。
(もっと読む)
物体検出法及び装置
物体の検出方法と装置に関する。1実施例では、保護領域に進入する人物を低パワー偏光電波で照射する。人物から反射される異なる偏光波を収集する。反射信号の多様なパラメータを測定し、これらの多様な選択された相違を計算して隠蔽武器を検出する。これらの相違は時間機能としてプロットされるとパターンを創出する。訓練された人工知能ネットワークパターン認識プログラムを使用してこれらのパターンを評価し、自動的に武器の存在を判定する。 (もっと読む)
レーダ装置
【課題】目標から反射してくる、時間的に振幅が大きく変化し、振幅の大きな期間が短い受信信号のSN比を改善して目標検出性能を向上できるレーダ装置を提供する。
【解決手段】空間に送信した送信波の反射波を受信することにより得られた受信信号をデジタルビデオ信号に変換する受信機4と、デジタルビデオ信号から不要波成分を抑圧する不要波抑圧装置9と、不要波成分が抑圧された信号に対し、検出対象とする目標からの受信信号のパルス毎の複素共役となり且つ積分利得を最大にできるパルス方向の長さを有する参照信号との間で畳み込み演算を行う畳み込み演算装置10と、畳み込み演算装置10から出力される信号に基づき目標からの反射波の信号を検出する検出装置8とを備えている。
(もっと読む)
物体を評価するためのレーダーセンサ、および方法
【課題】
【解決手段】周波数変調した送信信号を送信してセンサ検知範囲内の物体に反射した部分波を受信し、その際、各周波数ランプのいずれの反射させた物体についても送信信号に対する受信信号の周波数偏移が決定され、複数のランプの周波数偏移の組合せから、その検知された物体の相対速度および距離が決定可能である方法およびレーダーセンサが提案され、この場合、前の測定サイクルで検知された該物体がメモリに記憶され、その相対速度およびその距離が将来の測定サイクルのために予測され、予想される周波数偏移が決定され、かつ複数のランプの周波数偏移の組合せが、まだメモリに記憶されていない物体についての相対速度および距離の決定のために実施される。
(もっと読む)
短いパルス/ステップ周波数のレーダシステム
短いパルス、ステップ周波数、センターライン処理を組合わせた特有のハードウェアアーキテクチャである。本発明のアーキテクチャは短いパルスを送信する送信機と、そのパルスを受信してそれに応答して出力信号を提供する受信機とを有するレーダシステムを構成しており、各パルスは周波数がステップされている。例示的な実施形態では、送信機は周波数ソースと、そのソースに結合されたRFスイッチと、RFスイッチを制御する制御装置とを含んでいる。受信機はセンターラインラフィングフィルタで構成されている信号プロセッサを含んでいる。その信号プロセッサはそれぞれ距離ゲートとデジタルフィルタを有する多数のチャンネルを有している。デジタルフィルタは距離ドップラマトリックスを出力するように構成された高速フーリエ変換を含んでいる。 (もっと読む)
インパルス無線周波数信号による3次元画像の生成
画像マトリクスの生成は、複数の点を有する空間に関する往復時間マトリクスにアクセスするステップを有する。往復時間マトリクスは、信号が送信アンテナから点へ、更に受信アンテナへ伝わる推定往復時間を表す。空間の対象から反射された信号は、受信アンテナで受信される。以下のステップは、複数の点の少なくとも一部に対して、画像マトリクスを生成するよう繰り返される:複数の点の一部から点を選択するステップ;夫々の受信アンテナに関して、受信アンテナにより受信された信号の波形を定めて、往復時間マトリクスに従って、選択された点に対応する定められた波形の波形値を確認するステップ;及び選択された点に関して画像値を得るよう、選択された点の波形値を結合するステップ。画像マトリクスは、画像値から生成される。  (もっと読む)
(もっと読む)
非接触リーダライタ
本発明の目的は、異なる周波数の搬送波を用いた複数の送信信号を送信する送信部と、前記送信部により送信した複数の送信信号に対する返信である複数の返信信号を受信する受信部と、前記返信信号に基づく返信信号の位相データを算出する位相算出部と、前記位相算出部からの位相データに基づいて前記返信信号を返信した物体との距離を算出する距離算出部および/または前記受信信号から得られたベースバンド信号に基づいて、前記ベースバンド信号の周波数成分を算出し、前記周波数成分に基づいて前記返信信号を返信した物体の速度を算出する速度算出部と、前記送信部から送信する送信信号の送信方向を制御する制御部とを備えた非接触リーダライタを提供することである。 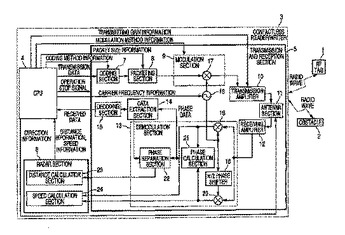 (もっと読む)
(もっと読む)
レーダ
所定の測定タイミングt−nTでの第1の突出部のピーク周波数f1[t-nT]から、今回の測定タイミングtでの第1・第2の突出部のピーク周波数の中心周波数fr[t] を予測し、(f1[t] +f2[t])/2が予測したfr[t] に近似するf1[t] 、f2[t] をペア候補として抽出する。また、ドップラシフト周波数が第1の突出部のピーク周波数f1[t-nT]および第2の突出部のピーク周波数f2[t-nT]から求まるドップラシフト周波数に略等しいf1[t],f2[t]を選択する。 (もっと読む)
車載レーダ装置およびその信号処理方法
複数のアンテナを切り替えるものにおいては、同時に検知できる範囲は1つであるため、遠距離向けのアンテナの使用時は、近距離の検知範囲が細くなり、逆に近距離向けのアンテナの使用時は、最大検知距離が低下する。また、レーダと画像センサを組み合わせるものでは、画像センサは、悪天候や光線条件(逆光,順光等)によってレーダ単体の場合と同様の検知性能になる場合がある。前方に電波を照射して反射波を受信することにより、少なくともターゲットとの相対速度又はターゲットの位置を検出する第1レーダと、該第1レーダとは検知範囲が異なる第2レーダとを備え、双方とも常時ターゲットの検知を行う。また、上記のようなレーダ装置において、ターゲットが前記第1レーダの検知範囲から外に出たときは、その直前の前記ターゲットの検知情報を前記第1レーダから前記第2レーダに引き渡す。 (もっと読む)
レーダ
バックグラウンドノイズの強度によって第1のしきい値(TH1)を定め、ピーク(P1),(P2),(P3)の各裾野部分にピーク位置から所定の近傍周波数領域にしきい値(TH21),(TH22),(TH23)を設定し、各FFTビンでこれらのしきい値のうち値の高い方を最終的なしきい値として採用し、そのしきい値を超えるピークをターゲットピークと見なして検出する。これにより、ビート信号の周波数スペクトルに含まれている物標からの反射波に起因して生じるターゲットピークを確実に検出し、物標の探知精度を高める。  (もっと読む)
(もっと読む)
レーダ
所定方位幅に広がる探知用電波のビームを送信し、物標からの反射波を受信するとともにビームの中心方位を変化させて所定単位角度毎且つ所定距離毎の受信信号の強度分布を検出し、方位変化に対する受信信号強度分布を直角座標で表した時にビームの方位幅により定まる方位幅を底辺とする二等辺三角形で近似させたときの頂点方位を物標の中心方位として検知する。これにより、探知用電波のビーム幅より高い分解能で、または方位方向のサンプリング間隔より高い分解能で物標の方位を検知できるようにし、また受信信号強度のピーク位置が物標の中心からずれる問題を解消する。  (もっと読む)
(もっと読む)
自動車用の測定装置
測定装置(10…)と少なくとも1つの物体(20)の間の距離を測定するための、および/または、測定装置と少なくとも1つの物体(20)の間の速度差分(v)を測定するための、自動車(1)用の測定装置に関する。測定装置は、信号部分(A(t)…)の2つのシーケンスと、各々が2つの一時的に変化する信号部分(Al…)を有する信号部分(A(t))の第1シーケンスおよび信号部分(B(t))の第2シーケンスとを包括する、送信信号を送信するための放出装置(35、55)を備える。信号部分(A(t)…)のシーケンスの2つの信号部分(A1…)の周波数は、それぞれ1差分周波数だけ異なり、信号部分(A(t))の第1シーケンスの差分周波数は、信号部分(B(t))の第2シーケンスの差分周波数と異なる。 (もっと読む)
レーダにおける探索用ブロードビームの使用時の効率的な仰角推定技法
コセカント2乗ビーム等の広域探索ビームを使用する時に、仰角を推定する方法及び装置が提供される。広域角度探索エリアをカバーするブロードビームによる探索中に検出される目標物のレンジが求められる。求められたレンジに基づいて、広域角度探索エリア内で、探索仰角を増加して、連続ビームが送信される。連続ビームのエコー信号を使用して、目標物についての仰角推定値が求められる。  (もっと読む)
(もっと読む)
時間領域のインパルス状の信号に基づく物体の高速な検出装置及び方法
超広帯域(UWB)RF信号を用いてターゲット領域における関心物体を検出するための方法及びシステムが開示されている。トランスミッタとアンテナアレイは、関心物体を含んでいるかもしれないターゲット領域を探査するために用いられる、超広帯域RFインパルス状信号を生成する。アンテナと信号処理手段は、ターゲット領域からの応答信号を受信し、一群の座標を生成するために応答信号を処理する。応答信号と既知の物体との間に対応が存在するか否かを決定するために、処理された応答信号の座標は、既存のデータベースにおける既知の物体の座標と比較さる。対応を示すものが存在する場合、既知の物体の存在が、システムのオペレータへ表示される。 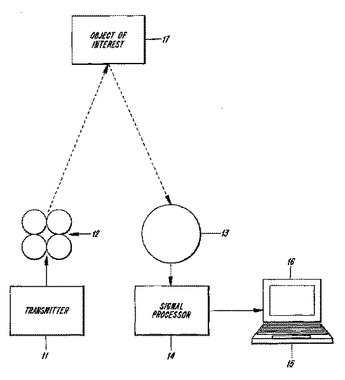 (もっと読む)
(もっと読む)
物体位置検出装置
【課題】 周波数変調したミリ波のビームを送信しかつ物体で反射した反射波を受信するミリ波モジュール1と、受信した信号を周波数分析する周波数分析手段と、周波数分析された信号に基づき物体の位置を検出する信号処理ユニット4とを備えた物体位置検出装置を低コストで構成する。
【解決手段】 周波数分析手段をその通過帯域が決定される抵抗をFETとした一つのBPF2によって構成する。BPF2のゲート電圧をゲート電圧制御部2aによってミリ波の周波数変調に同期して変更させ、BPF2の通過帯域を変更しながら反射波の信号を通過させる。
(もっと読む)
レーダ装置
【課題】 ISAR画像とレンジプロファイルの実長さを合わせて上下に並列にならべて表示することで、レンジ方向の反射強度分布とドップラ周波数の関係を明確にしてISARによる船舶目標の識別確度を向上させる。
【解決手段】 送信信号を発生する送信機1と、送信信号を放射するとともに目標からの反射信号を受信するアンテナ3と、反射信号を受信処理してビデオ信号を生成する受信機4と、ビデオ信号に対して合成開口処理を行いISAR画像信号とレンジプロファイルの画像信号を生成するISAR処理部5cと、これら画像信号を同一画面上に表示させる表示信号を生成する表示処理部5dとを備えている。
(もっと読む)
レーダ装置
【課題】 IQバランスの悪化により、偽スペクトルが発生し、距離,相対速度演算時間が増大するのを防止する。
【解決手段】 送信電磁波を出力する送信手段と、送信電磁波が目標物体で反射されて戻ってきた受信電磁波をIQ位相検波する受信手段と、この受信手段の出力信号を、FFT処理する信号変換手段と、この信号変換手段で変換されたデータの中に周波数の絶対値が同じで正負の両方に振幅レベルのピーク値を持つ一対のスペクトルがあれば、振幅レベルのピーク値の大きい方が真のスペクトルであると判定し、判定された真のスペクトルの周波数を用いて、目標物体との距離,相対速度を演算する信号処理手段とを備えたものである。
(もっと読む)
FMCWレ―ダ装置及び記録媒体
【課題】 移動物と静止物を正確に認識できるFMCWレーダ装置及び記録媒体を提供すること。
【解決手段】 ステッフ゜200では、周波数シフト量の幅を決定する。ステッフ゜210では、周波数シフトを行う。ステッフ゜220では、評価値|Vp|を算出する。ステッフ゜230では、近傍和Sum2を算出する。ステッフ゜240では、スペクトル全体和Sum1を算出する。ステッフ゜270では、全てのスペクトル全体和Sum1の値を比較して、真の周波数シフト量TSnを決定する。ステッフ゜280では、真の周波数シフト量にて周波数シフトしたスペクトルに関し、スペクトルピークの近傍和Sum2が閾値Thp以下か否かを判定する。ステッフ゜290では、移動物予測フラグがセットされているか否かを判定する。ステッフ゜300では、近傍和Sum2が閾値Thp以下で且つ移動物予測フラグがセットされていないので、そのスペクトルピークは静止物のスペクトルピークであると判断する。
(もっと読む)
861 - 880 / 880
[ Back to top ]