
Fターム[5J070AJ02]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | 座標変換 (57)
Fターム[5J070AJ02]の下位に属するFターム
r、θ←→X、Y (23)
Fターム[5J070AJ02]に分類される特許
21 - 34 / 34
空港面監視装置

【課題】空港面探知レーダによる空港面監視を、マルチラテレーションの情報を統合することで補完し、効率的で安全な空港管制を実現可能にする。
【解決手段】空港に配置された複数の地上局により、目標が発信する信号を受信し、受信信号の到達時間差から目標の3次元位置情報を算出すると共に、目標の識別情報を得るマルチラテレーションと、3次元位置情報に基づいて目標が空港上空を低高度で飛行しているか、飛行せず空港面上に在るかの判定を行う目標高度監視装置と、当該判定結果に基づいて空港面探知レーダとマルチラテレーションが算出した目標の位置情報を統合処理し、得られた位置情報に対応する識別情報を付加する統合処理装置と、統合された目標の位置情報と識別情報を、空港面を表す座標上に表示する表示装置を備えたものである。
(もっと読む)
無線ICタグの位置特定システム、並びに位置特定装置

【課題】無線ICタグの向き(指向性)をリーダ/ライタのアンテナの指向性に対して、常に最良の向きに装着されない、又は移動するなど、ばらばらなため、無線ICタグが十分な電波強度でリーダ/ライタからの読み取り電波を受信できないという問題を解消して、無線ICタグの安定した読み取りを可能にし、無線ICタグの位置を正確に特定する。
【解決手段】この位置特定システムは、読取り用の使用周波数を切替えながら、異なる偏波の方向を有する電波である垂直偏波、水平偏波、右回り円偏波、左回り円偏波などを用いて、固有IDを記憶した無線ICタグから固有IDを読み取る、複数のリーダ/ライタと、異なる偏波の方向を有する電波を用いてリーダ/ライタに固有IDの読み取りを行わせた結果、異なる偏波の方向を有する電波ごとに得られた、各固有IDについての受信信号の強度を用いて、無線ICタグの位置を算出する位置特定装置とを有する。
(もっと読む)
無線発信機の三次元位置を推定する方法、プログラムおよびシステム
【課題】無線発信機の三次元位置を精度良くかつ高速に推定することができる方法を提供することを目的とする。
【解決手段】本発明は、無線発信機の三次元位置を推定する方法を提供する。この方法は、無線受信機が無線発信機からの無線信号を受信する位置まで、無線受信機を備えた移動体を作業空間内で移動させるステップと、無線受信機が前記無線信号を受信したとき、移動体が所定の動作を行い、無線信号の受信状況を記憶するステップと、受信状況に基づいて無線発信機の三次元位置を求めるステップと、を有する。
(もっと読む)
相手船動静監視装置
【課題】 Bスコープ座標で示される相手船妨害ゾーンの映像と平面座標で示されるレーダ映像との関係が容易に理解できるようにする。
【解決手段】
相手船妨害ゾーンを示す船舶航行支援装置の表示画面1とレーダ装置の表示画面9とは近接して配置される。それらの画面1,9は、VRMとEBLとにより相互に連動するようにされている。
(もっと読む)
合成開口レーダ画像のオルソ補正装置及びオルソ補正方法
【課題】 従来、オルソ補正画像を等間隔の格子でブロック分割し、ブロック毎に、かつ複数の標高の基準面毎に、歪みのモデル式を求めていたため、各格子点で、オルソ補正画像とSAR画像の対応関係を複数の基準面毎に算出する必要があった。又、SARでは、衛星方向に向いた斜面は明るく、逆方向の斜面は暗く撮像される。オルソ補正画像ではこの縮まった明領域は引き伸ばされ、暗領域は縮められるため、SAR画像とオルソ補正画像を比較すると、画像全体の輝度値が保存されなかった。
【解決手段】 オルソ補正画像を等間隔の格子でブロックに分割し、ブロックの各格子点において、オルソ補正画像とSAR画像の対応関係の算出を1回に減らすことにより、処理時間の短縮を実現するとともに、輝度の補正を行い、画像全体の輝度値を保存する様にした。
(もっと読む)
レーダー画像表示方法およびレーダー画像表示装置
【課題】分解能を上げることなく簡易な構成により画素抜けを防止するとともに、画素抜けが連続2画素分以上発生する場合やレーダー情報の解像度を下げた場合にも容易に対応することができるレーダー画像表示方法およびレーダー画像表示装置を実現する。
【解決手段】極座標形式で与えられるレーダー情報を直交座標に座標変換して画像表示するレーダー画像表示装置において、描画空間を任意の象限に分割するとともに、この描画空間においてスイープラインが存在する象限およびスイープ方向を判断し、スイープラインの存在する象限およびスイープ方向に応じて、本来の描画画素に隣接する画素に描画点を追加することを特徴とする。
(もっと読む)
レーダ装置および類似装置
【課題】
複数のレーダアンテナから得られる探知データを正確に合成して表示するレーダ装置を提供する。
【解決手段】
レーダアンテナ11から得られた探知データは相関処理部91Aで相関処理される。レーダアンテナ21から得られた探知データは相関処理部91Bで相関処理される。レーダアンテナ21からの相関処理データと同じアドレスを指定するマスク画像は、マスク領域発生部32により設定されてマスク用画像メモリ62に書き込まれる。これら相関処理部91A,91Bの各相関処理データはレーダアンテナ11,21の設置位置に応じたアドレス設定がされており、相関処理部91Bの処理用画像メモリ902B、マスク用画像メモリ62は共通のアドレスが設定されている。表示用画像メモリ61は、マスクデータに従って入力された相関処理データを表示画面に設定されたアドレスに従って記憶するとともに表示器10に出力する。
(もっと読む)
車載レーダ装置
【課題】 電波をレーダ波とするレーダ装置において、路側物の検出を精度を向上させる。
【解決手段】 信号解析処理でのFFT処理結果に基づいて生成した受信ベクトルX(k)をユニタリ変換し、そのユニタリ変換された受信ベクトルY(k)に基づき、次式を用いて、過去の受信ベクトルを反映し、且つユニタリ変換された相関行列Ryy(k)を生成する(S210〜S240)。
Ryy(k)=α・Ryy(k−1)+(1−α)・Y(k)YH(k)
この相関行列Ryy(k)に基づいて生成したMUSICスペクトラムから静止物標に対応する候補点を抽出し、この候補点と、虚像を発生させる原因となった物標に対応する重要候補点とを用いてハフ変換を行うことで、路側物の配列状態を検出する(S250〜S320)。
(もっと読む)
レーダー装置
【要 約】
【課 題】本発明は、簡易な構成で対象物までの距離及び方向を検出することを目的とする。
【解決手段】送信波を送信し対象物で反射された受信波を受信する第1及び第2の送受信回路を有し、前記第1の送受信回路は第1の送受信回路の送信した送信波が対象物で反射された受信波を受信すると共に前記第2の送受信回路が送信した送信波が対象物で反射された受信波を受信し、第2の送受信回路は当該第2の送受信回路の送信した送信波が対象物で反射された受信波を受信することを特徴とする。前記第1及び第2の送受信回路を用いて前記第1及び第2の送受信回路から対象物までの距離を算出し、算出した対象物までの距離に余弦定理を適用することで、送受信回路及び対象物を結ぶ直線と、2つの送受信回路を相互に結ぶ直線との成す角度を算出する。
(もっと読む)
レーダの設置情報の確認画面と調整画面の表示方法
【課題】
道路付近に設置したレーダの設置位置や設置方向の確認や調整を容易に行う。
【解決手段】
レーダの傍らにカメラを設置してレーダとカメラの相対位置と相対方向を冶具により所定値に保持しておき、カメラの画像中の所定物標を空間の座標系により点もしくは直線で定義し、所定の幾何式で計算した上記点あるいは直線の投影をカメラの画像上に描画したオーバレイ画面を合成して表示する。
オーバレイ画面中においての物標と描画物が一致していない場合、物標と描画物との表示位置が一致するように処理装置内のデータを調整するユーザインタフェース画面を表示して処理装置内のデータを調整することで、道路中と処理端末内のレーダの設置位置や設置方向が一致するよう画面上で調整できる。
(もっと読む)
移動体の周囲物体検出装置及び移動体の周囲物体検出方法
【課題】検出精度を向上させることのできる移動体の周囲物体検出装置及び方法を提供する。
【解決手段】複数の検出手段X(i),X(i+1)・・を有し、各検出手段は、自車両の周囲に存在する物体を検出するセンサ部13と、センサ部13で検出された物体と自車両との間の相対位置データを求める位置算出手段14と、センサ部13の検出データに基づいて、自車両と物体との間の相対位置データの確信度データを求める確信度演算手段15とを有する。そして、各検出手段で求められた確信度データに基づいて、この検出手段で求められた相対位置データを重み付け処理し、重み付け処理された各相対位置データに基づいて、自車両と物体との相対位置を求める統合座標算出手段11を備えたことを特徴とする。
(もっと読む)
発射された発射体の実際の方向と、所定の方向と、の間の偏差を、測定する方法及び装置
所定の進路から発射体の進路の偏差を測定する方法。前記方法は、所望された進路又は方向が指摘された、ターゲット領域における画像を用いる。その後、実際の方向又は進路が測定され、偏差が測定される。  (もっと読む)
(もっと読む)
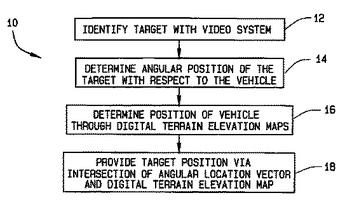
ターゲット位置特定のためのシステムおよび方法
ビークル(102)からターゲット位置を決定する方法が説明される。この方法は、ビデオシステム(124)を使用してターゲット(100)を識別するステップ(12)、ビークルに関するターゲットに対する角度位置ベクトル(104)を決定するステップ(14)、デジタル地勢高度図(122)および精密レーダ高度計(30)を使用してビークルの位置(108)を決定するステップ(16)、角度位置ベクトルがデジタル地勢高度図と交差する位置を計算するステップ、およびビークル位置ならびに角度位置ベクトルとデジタル地勢高度図との交点の位置に基づいてターゲット位置(112)を生成するステップ(18)を含む。
 (もっと読む)
(もっと読む)
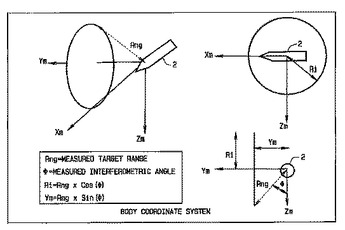
レーダ戻りデータを重み付ける方法および装置
前記レーダターゲット(48)の位置を決定することにおいて位相レーダエコーからの加算による地勢エコーフェーディングの影響を減少する方法が提供される。この方法は、レーダターゲットの地勢特徴から生じるレーダエコーフェーディングの程度に比例する、干渉角Φへ寄与する地勢特徴の影響を調整することにより、少なくともひとつのレーダエコーに基づきレーダターゲットへの干渉角Φを決定するステップと、干渉角Φをフィルタリングするステップとを含む。訂正された干渉角Φは、フィルタリングの少なくとも一部に基づいて提供される。
 (もっと読む)
(もっと読む)
21 - 34 / 34
[ Back to top ]