
Fターム[5J070AK13]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833)
Fターム[5J070AK13]の下位に属するFターム
Fターム[5J070AK13]に分類される特許
261 - 280 / 392
応答器
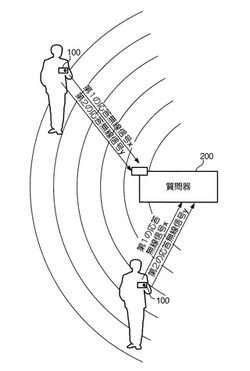
【課題】応答信号強度の低下を抑止しつつ2種類以上の応答信号を生成させる。
【解決手段】質問器200からユーザの所在を問合せる無線信号が発信された時に、応答器100のスイッチをオフ状態にすると、応答器は第1の応答無線信号xをその発信元の質問器に返信する。一方、応答器のスイッチをオン状態にすると、応答器は第2の応答無線信号yをその発信元の質問器に返信する。すなわち、この応答器は、スイッチのオン/オフに応じて、バッテリレスで2種類の応答無線信号を切り替えて返信することができる。
(もっと読む)
地中に埋設された又は土木建造物中に埋込された埋設パイプ又は他の物体を識別及び追跡するのに適する検出システム
本発明は、地中に埋設された又は土木建造物に埋込されたパイプ及びコンジット又は他の物体を識別及び追跡するよう設計された検出システムに関し、物体(1)に取付、又は一体化され、又は物体(1)から所定の距離をおかれて配置されたコーディング要素であって、所定の厚さの一連のコーディング要素群(3)の形をとり、それぞれが所定の寸法を持つ表面を形成し、前記要素群は互いに離れており、前記要素群の配置によってコードを定義する、コーディング要素と、少なくとも1つの送信コイル(5)、少なくとも1つの受信コイル(6)を備える検出装置と、前記コイル(5,6)からの信号を処理する装置とを備え、コーディング要素(3)の少なくともいくつかは、磁性材料からできており、前記検出装置は、前記コーディング要素(3)の動作点をその動作サイクル内で飽和又は変化させるよう構成され、基本周波数の電波及び前記基本周波数の複数倍の周波数を持つ高調波である電波からなる複数の周波数を含む信号を放射することによって、前記要素(3)からの前記信号を受信及び処理し、前記物体(1)の前記コードを再構築する。  (もっと読む)
(もっと読む)
物体検知装置および方法

【課題】単一の距離センサのみで簡易な構成および効率的な処理によって、測距領域に侵入した検知物体の種類の正確な検出を行なうことができる物体検知装置および方法を提供すること。
【解決手段】警備装置100において、測距領域における物体を検知する測距センサ101と、検知された検知物体までの距離を算出するセンサ制御部102と、検知物体までの距離に基づいて検知物体の高さを算出する物体高算出部103と、検知物体の高さと測距領域における検知物体の幅とに基づいて検知物体の断面積を算出する断面積算出部104と、検知物体の断面積に基づいて検知物体の種類を判断する物体判断部105とを備えた。
(もっと読む)
物体検出方法および物体検出装置
【課題】初期設定が容易でありながら、高い検出精度を得ることができる物体検出方法および物体検出装置を提供すること。
【解決手段】カメラ1とレーダ2からの入力に基づいて得られる外界に存在する物体に関する情報に基づいて物体の検出を行うコントロールユニットCUが、前記情報を、あらかじめ設定された物体の種類とその判定に用いる情報ごとの重要度とに基づいて設定された重要度特性と照合することで物体の種類を判定する物体判定処理と、この物体判定処理における判定結果が正しい場合、前記重要度特性におけるその物体の種類判定に用いられた情報の重要度を増加させる更新処理と、を行うようにした。
(もっと読む)
録音支援装置
【課題】音の歪みを防ぐとともに収音される音声に忠実な録音を容易に行わせる。
【解決手段】サーバ装置3の記憶部には、楽器の機種毎の録音の制御に関わる制御情報と楽器の演奏音を録音する際の録音機の設置の態様を示す設置態様情報とが、楽器の機種を示す機種情報に関連付けて記憶されている。録音機2の読取部28は、楽器1に付与されたRFIDタグに記憶されている機種情報を読み取り、CPUに供給する。録音機2のCPUは、供給された機種情報をサーバ装置3に送信し、サーバ装置3は、受信した機種情報に対応する制御情報と設置態様情報とを、機種情報の応答情報として録音機2に送信する。録音機2の音声処理部26は、受信された制御情報に基づいてオーディオ信号の録音レベルを制御し、また、録音機2のCPU21は、受信された設置態様情報の示す内容を表示部23に表示させる。
(もっと読む)
位置算出システム
【課題】本発明は、固定型の位置検出装置と移動型の位置検出装置とが混在する場合であっても、ある位置検出装置で検出されたユーザの位置情報を正確に自己の座標系で表現することのできる位置算出システムを提供する。
【解決手段】本発明は、固定型の位置検出装置と移動型の位置検出装置を含む位置算出システムにおいて、ある位置検出装置が、ある時刻における自己の座標系における位置検出対象の位置を要求すると(S11)、当該時刻付近において他の位置検出装置において検出された位置検出対象の当該他の位置検出装置における座標系で検出された検出対象の位置情報を経路コストなどを考慮して座標変換順を決定し、この決定された座標変換順にしたがって座標変換することにより(S16)、自己の座標系における位置を得る。
(もっと読む)
位置推定システム
【課題】ユーザが移動しても確率モデルを変更することなくユーザ位置を推定する。
【解決手段】本発明は、タグリーダを有するユーザの位置の確率を、固定タグからの電波強度を使用して推定し(S1〜S4)、移動可能タグからの電波強度を使用して、推定された確率に対する重み付けを算出(S5、S6)することによりユーザの位置を推定するユーザ位置推定システムである。
(もっと読む)
超広帯域探測信号の支援により移動物体を検出するセンサ
【課題】モニタされる領域内で移動物体、例えば人間を検出するために使用することができるセンサを提供する。
【解決手段】第1の実施形態では、本発明のセンサは、第1及び第2のアンテナと、2つの出力部が設けられ、その第1の出力部が第1のアンテナの入力部/出力部に接続され、第2の出力部が第2のアンテナの入力部/出力部に接続されたパルス発生器とを含む。センサの出力回路は、2つの検出器から成り、第1の検出器の入力部は、第1のアンテナの入力部/出力部に接続され、第2の検出器の入力部は、第2のアンテナの入力部/出力部に接続される。第1の検出器の出力部は、差動増幅器の第1の入力部に接続される一方、第2の検出器の出力部は、その第2の入力部に接続される。差動増幅器の出力部は、低周波フィルタと、出力部が差動増幅器の入力部の一方に接続されたフィードバック装置とに接続される。低周波フィルタの出力部は、コンパレータ入力部に接続される。第2の変形では、センサの入力回路は、各々に2つの入力部が設けられた2つの検出器から成る。パルス発生器の第1の出力部は、第1のアンテナの入力部/出力部と第1の検出器の第2の入力部とに接続される。第1のアンテナの入力部/出力部は、第2の検出器の第1の入力部に接続される一方、パルス発生器の第2の出力部は、遅延を通じて第2の検出器の第2の入力部に接続される。
(もっと読む)
車両の周辺監視装置、車両、車両の周辺監視方法、および車両の周辺監視用プログラム
【課題】撮像装置の撮像画像から抽出された対象物の種別の判断処理の演算処理負荷を軽減することができる車両の周辺監視装置を提供する。
【解決手段】撮像装置2R,2Lの撮像領域に存在する対象物を検出するミリ波レーダ装置20を車両10に備える。ミリ波レーダ装置20は、送信したミリ波の反射波のうち、所定強度以上の強度を有する反射波を受信し、その反射波に基づき、対象物を検出する。検出される対象物は、人などの生体以外の物体となる。撮像装置2R,2Lの撮像画像からの対象物の抽出結果と、ミリ波レーダ装置20の検出結果とを基に、対象物の種別を判断する。
(もっと読む)
レーダ装置
【課題】先行車と自車の距離が急激に変化した場合においても、先行車を見失うことなく、光軸の補正を行うことができるレーダ装置を提供する。
【解決手段】レーザレーダ装置100は、先行車との距離Lを測定する。レーザ光は、リフレクタ200での反射光が最大となる。レーザレーダ装置100は、受光量が最大となるレーザ照射角度と、水平照射角度の差θを算出する。距離Lとθから、レーザレーダ装置100とリフレクタ200の設置位置の高差hを求める。先行車との距離が所定値未満、かつ相対速度(の絶対値)が所定値以上となった場合、高差hに基づいて、理想的光軸ずれ補正量を算出する。
(もっと読む)
周辺物体識別装置
【課題】適正に路側固定物と他車とを弁別できる「周辺物体識別装置」を提供する。
【解決手段】自車300がガードレール310の右側を走行していたり(a1)、自車300の左方に併走している他車320が存在するために(b1)、自車位置301の左側部に位置する自車との距離が変化しない追尾中物体311/321が発生した場合(a2、b2)、当該追尾中物体311/321に加え、自車の左前方にあって当該追尾中物体311/321と一列を成す、自車進行方向と逆方向の自車速度V0と同じ大きさの相対速度-V0を持つ追尾中物体が存在するかどうかを調べ、そのような追尾中物体312存在する場合には(a1、a2)、追尾中物体311は、路側固定物であると識別する。
(もっと読む)
車両位置演算装置、車両選定方法
【課題】車車間通信している他車両の位置を高精度に検出可能な車両位置演算装置、車両選定方法を提供すること。
【解決手段】自車に搭載された他車の位置を検出する他車位置検出手段11と、外部から他車の位置情報を取得する他車位置情報取得手段14と、他車位置検出手段11により検出された他車の位置に対応する位置情報の他車を選定する他車選定手段10と、を有することを特徴とする車両位置演算装置、車両選定方法を提供する。
(もっと読む)
車両の障害物検知装置
【課題】レーダ装置1を備えた車両の障害物検知装置において、レーダ装置1により検知した物体が、自車両と衝突する可能性がある障害物であると認識するか否かの判定を正確に行えるようにする。
【解決手段】レーダ装置1を、電波を送信しかつ該送信した電波が物体で反射してきた反射波を受信することで該物体を検知するとともに、該物体による反射波の受信強度が所定閾値以上であるときに、該物体が、自車両と衝突する可能性がある障害物であると認識するように構成する。そして、上記所定閾値を、予め複数設定しておく。
(もっと読む)
物品位置検知システム
【課題】 宅内の物品の存在場所を効率よく検知することができる物品位置検知システムを提供する。
【解決手段】 宅内に配置された複数の無線通信モジュール8bと、宅内の物品300に設けられて無線通信モジュール8bとの間で無線通信を行うIDタグ200と、複数の無線通信モジュール8bの制御、監視を行う通信制御監視モジュール8aとを備え、複数の無線通信モジュール8bが互いに異なる範囲へ無線信号を各々送信し、当該範囲に存在する物品300に設けたIDタグ200との間で無線通信を行うことによって、物品300の位置を検知する。
(もっと読む)
ミリ波レーダによる道路交通監視装置
【課題】ミリ波レーダにより走行車両を計測し車線数、各車線幅、中央分離帯幅などを自動的に判断しながら車両交通量を監視する道路交通監視装置を提供する。
【解決手段】ミリ波レーダ2によりミリ波ビーム7を照射し反射波受信により複数の走行車両の検出を行う。照射角、反射までの時間、ドップラーシフトの関係から、ミリ波レーダ2からの距離、方向角度、速度等を算出し、車両の走行軌跡を求め、走行車両数と車線幅方向の関係をグラフ化してグループ分けを行い、グラフの山から車線数を抽出し、グラフの山と両脇の谷から車線幅を抽出する。走行軌跡の速度成分方向が正から負に切り替わる境界部分の中央分離帯の幅を求める。以上で得られた道路配置に基づき車両交通量の計測と監視を行う。
(もっと読む)
車載用レーダ装置
【課題】先行車を認定してその情報を制御ユニットへ出力するレーダ装置において、自車線判定幅の設定および適用を工夫することにより、先行車に対する捕捉性を高めつつ、隣接車線の車両を先行車と誤認するのを防止しえるようにする。
【解決手段】車両をターゲットにその情報を検出する手段(S1)、先行車と認定中のターゲット情報については、広い自車線判定幅L2を適用して自車線判定幅L上にターゲットが存在するかどうかを判定する一方、それ以外のターゲット情報については、狭い自車線判定幅L1を適用して自車線判定幅L上にターゲットが存在するかどうかを判定する手段(S2,S3,S4,S8,S9)、これらの判定結果から自車線判定幅L上で自車に車間距離が最も近いターゲットを先行車と認定する手段(S6,S7)、を備える。
(もっと読む)
物体検出方法および物体検出装置
【課題】外部環境情報を取得するための特別な装置を用いることなく、物体検出精度の向上を図ることができる物体検出装置を提供すること。
【解決手段】カメラ1およびレーダ2から得られた情報に基づいて物体を検出するコントロールユニットCUを備えた物体検出装置であって、コントロールユニットCUには、画像情報と検波情報とに基づいて、外部環境を検出する外部環境検出処理部13が含まれ、コントロールユニットCUは、物体検出に外部環境検出処理部13の判断結果を反映させる。
(もっと読む)
物標識別装置、プログラム
【課題】 少ない処理量にて物標が人間であるか否かを識別できるようにすることを目的とする。
【解決手段】前サイクルでの認識物標と、画像処理部からの物標情報とを対応づけ、その対応付けた属性に基づいてしきい値を設定し、その設定したしきい値を用いて、ビート信号の周波数解析結果から周波数ピークを抽出する(S31〜S37)。上り区間のピークと下り区間のピークとで、同一物標に基づくピーク周波数成分を組み合わせてなるピークペアを設定すると共に、そのピークペアに基づいて物標を認識し(S38〜S40)、認識した各物標毎に、その物標を表すピークペアの正規化平均パワー値NP、及びピークペア間のパワー値の差の時間的なばらつきを表す標準偏差DPに基づき、対象物標の属性値を、「車両」「非車両:人間」「非車両:その他」のいずれかに設定する(S41)。
【選択図】 図4  (もっと読む)
(もっと読む)
無線資産識別および位置特定
複数の基準位置タグと複数の資産識別タグとを含み、それぞれの基準位置タグと資産識別タグがタグの範囲を制御できる送受信機と、固有のタグ識別番号と、ネットワークに接続された複数の資産識別および位置特定探索ユニットを有し、それぞれの資産識別および位置特定探索ユニットが資産識別タグおよび基準位置タグからの信号の送信および受信またはそのいずれかを行う、資産識別および位置特定システムである。 (もっと読む)
二次監視レーダ
【課題】二次監視レーダにおいて、オールコールにおけるモードSトランスポンダの検出確率の向上を図る
【解決手段】オールコール期間TAに受信されたモードS専用オールコール応答信号Ax,A2から、複数のターゲットからなる重畳信号Axを検出したとき、その検出された重畳信号Axのターゲット情報(レンジ、アジマス)に基づくスケジュールをロールコール期間TRに設定し、その設定されたスケジュールにより、応答確率1/2以下のモードS専用オールコール質問を送信し、確率捕捉を実行する。
このように、オールコール期間TAで重畳信号Axを検出したとき、応答確率1/2以下のモードS専用オールコール質問QAxをロールコール期間TRに送信して、その応答を受信し検出するので、オールコール期間TAにおける確率捕捉を回避して、ターゲット検出率の維持と、検出の迅速化を実現できる。
(もっと読む)
261 - 280 / 392
[ Back to top ]