
Fターム[5J070AK13]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833)
Fターム[5J070AK13]の下位に属するFターム
Fターム[5J070AK13]に分類される特許
221 - 240 / 392
移動体の位置の計測方法
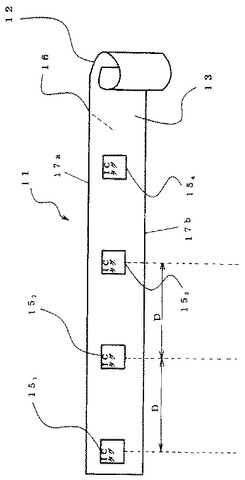
【課題】複数のICタグを利用して移動体の位置を把握する移動体の位置の計測方法。事前に複数のICタグ全ての位置を計測しておく必要が不要で、複数のICタグを利用していながらその設置や撤去を容易にする。
【解決手段】複数個のICタグと少なくとも2個の目標があらかじめ定められている位置関係で配置されている移動体位置計測用具を配備し、当該移動体位置計測用具における前記目標の中の少なくとも2個以上の目標の位置を計測することにより、前記複数個のICタグの位置を把握すると共に、位置を計測される対象となっている移動体が前記複数個のICタグの中のICタグからの電波を受信して、当該電波を受信したICタグの位置を把握することにより、当該移動体の位置を計測する。
(もっと読む)
物体検出装置、および車車間通信システム

【課題】車両の周囲に存在する物体を検出する物体検出装置において、路側物と二輪車等の車両とを精度よく識別できるようにする。
【解決手段】支援制御ECUは、車両検出処理において、複数のサイドカメラによる撮像画像に基づく画像処理と、複数のソナーによる検出タイミングの差分とによって検出した物体の各移動速度を比較することにより、物体が車両であるか否かを判定する。即ち、別々に検出した物体の移動速度を比較することによって、物体の移動速度を高精度に求め、この物体の移動速度に基づいて物体が車両であるか路側物であるかを識別できるようにしている。従って、路側物の形状が車両の形状と似ている場合であっても、この物体が路側物であるか車両であるかを誤判定することなく精度よく識別することができる。
(もっと読む)
電波探知装置
【課題】同一種類のレーダ機器が複数種類の航空機や船舶に搭載されることが多いため、探知目標の情報と既知のプラットフォーム情報のみから搭載母体(プラットフォーム)を推定することは困難であった。
【解決手段】レーダ機器より発射された到来電波を分析し、この分析結果とレーダ波諸元ライブラリを比較照合してレーダ機器を推定するレーダ波電波諸元識別照合回路4と、同じ搭載母体の通信機器より発射された到来電波を分析し、この分析結果と通信波諸元ライブラリを比較照合して通信機器を推定する通信波電波諸元識別照合回路8と、推定したレーダ機器と通信機器の両方の情報をプラットフォームライブラリと照合するプラットフォーム識別回路10とを設け、プラットフォーム識別の確実性を向上させたものである。
(もっと読む)
位置検出システム。
【課題】 対象物と受信器の間又はあらかじめ位置確認がなされた複数の位置と受信器の間に同一の障害物が介在する場合でも、精度良く対象物の位置検出が可能な位置検出システムを提供すること。
【解決手段】 位置検出すべき対象物2が付帯するタグRFtからの第1の信号と、あらかじめ位置確認がなされた複数の位置のリファレンスタグRFa〜RFeからの第2の信号と、第1の信号と第2の信号を受信する3台の受信器RSa〜RSc(タグリーダー)と、受信器RSa〜RScが受信した第1の信号と第2の信号を用いて対象物2の位置を検出する位置検出システムで、第1の信号と第2の信号の夫々の電界強度の状態と、電界強度の状態の変化の時期と、から対象物2の位置を検出する。
(もっと読む)
モードS二次監視レーダ
【課題】監視空域内に存在する航空機(トランスポンダ)を適確に把握し、航空機を安全に飛行させるモードS二次監視レーダを提供する。
【解決手段】質問に対する応答を受信するとともに、航空機から送信されるモードS拡張スキッタを受信する受信器123と、応答を受信すると、応答とモードS拡張スキッタとの相関値を求める相関処理手段135bと、相関値に基づいて、応答を送信した航空機をロールコール質問/応答による監視対象とするか否かを判定する有効判定手段135cと、航空機がロールコール質問/応答による監視対象とすると判定されると、航空機のモードSアドレスを含むレコードを登録機データに追加する更新手段135aとを備える。
(もっと読む)
高周波センサ装置
【課題】マン・マシン・インタフェースとして使いやすい高周波センサ装置を提供する。
【解決手段】送信波を発生する発振回路と、前記送信波を放射し、前記送信波の物体による反射波を受信波として受信するアンテナと、前記受信波を検知する検波回路と、前記検波回路に含まれるドップラー信号に基づいて被検知体の検知の有無を判定する制御判断回路と、前記アンテナから放射される電波の方向を変えるための制御信号を前記アンテナに出力する電波走査制御回路と、を備え、前記制御判断回路は、前記アンテナに近づく被検知体の接近を検知する人体検知モードと、前記検知した前記被検知体が前記アンテナの前で実行する動作を検知するスイッチ入力モードと、を実行可能であり、前記人体検知モードを実行中に被検知体を検知すると、前記人体検知モードを終了して前記スイッチ入力モードを実行することを特徴とする高周波センサ装置が提供される。
(もっと読む)
車両用周辺監視装置
【課題】車両の衝突の回避又は軽減を図るために、車両の前方及び前側方の物体を監視する車両用周辺監視装置を提供することを課題とする。
【解決手段】
車両用周辺監視装置は、車両の前方で物体を検知する前方監視レーダ110、車両の左前側方で物体を検知する左前側方監視レーダ120、車両の右前側方で物体を検知する右前側方監視レーダ130、自車両の進行方向を検知する進行方向判定部143、及び、監視部144を備える。監視部144は、静止物体については、前方監視レーダ110、左前側方監視レーダ120及び右前側方監視レーダ130のうち、進行方向判定部143によって検知された自車両の進行方向に検知範囲を有する監視レーダのみで監視し、移動物体については、自車両の進行方向に応じて、前方監視レーダ110、左前側方監視レーダ120及び右前側方監視レーダ130に優先順位をつけて監視する。
(もっと読む)
画像目標識別装置
【課題】目標の形状がはっきりしない場合や目標が遠方に位置するような場合でも精度の高い目標識別を行うことのできる画像目標識別装置を得る。
【解決手段】目標検出処理部2は、撮像映像信号10からランプを点滅させた目標を検出する。点滅周期測定部4は、ランプ点滅周期を測定し、第1の目標識別部5は、この点滅周期に基づいて目標識別を行う。点滅立ち上がり測定部6は、ランプの立ち上がり特性を測定し、第2の目標識別部7は、ランプの立ち上がり特性に基づいて目標識別を行う。
(もっと読む)
パッシブコヒーレント探索アプリケーションにおいて、集中方式で関連付けし追尾するシステムおよび方法
【課題】PCLアプリケーション用の集中方式で関連付けおよび追尾するシステムおよび方法。
【解決手段】検出レポートは、ターゲット追尾処理システムで受け取られる。検出レポートは、早期の処理オペレーションにおけるターゲットエコーと関連付けられたライントラックと関係がある測定値を含む。さらに、パラメータおよびオブザーバブルなどの他の情報がターゲット追尾処理システムによって受け取られる。ターゲット追尾処理システムは、検出レポート内の測定値に従って、ライントラックについてライントラック関連付け機能部およびトラックフィルタリング機能部を実施する。これらのオペレーションはまた、追尾のために、ターゲットパラメータを予測し評価する。ターゲットパラメータは、伝搬させられ、更新されたターゲットトラックから外挿され、ユーザのためにディスプレイに供給されるか、または、さらに処理を行うために、PCLシステムに戻される。
(もっと読む)
距離測定装置
【課題】対象物からの信号と、対象物以外から反射された信号を識別して距離測定できる距離測定装置。
【解決手段】図1aは第1送受信機10、図1bは第2送受信機20の構成を示す。第1送受信機10は、平衡変調器106により生成した周波数の異なる2つの信号を送信する。第2送受信機20は、その2つの信号から非線形デバイス122により3次相互変調波を生成し、送信する。第1送受信機10はその3次相互変調波を受信し、位相差を検出する。この位相差により、第1送受信機10から第2送受信機20までの距離を測定できる。第1送受信機10が送信する信号の周波数と受信する信号(3次相互変調波)の周波数が異なるため、第2送受信機20以外からの反射波と区別でき、混信を防止できる。
(もっと読む)
ETC通信監視装置及びETC通信監視方法
【課題】車両がETCレーンを通過する際に、ETC車載器の電波の質とアンテナ設置箇所等を監視する。
【解決手段】受信部12でETC応答電波の受信を監視し、信号処理部13で受信した電波を用いて電波発射源の可視化処理を行い、同時に上部撮影部15で車両の上部フロント画像を撮影する。上記可視化処理が行われると、信号処理部13では、その処理結果から電波発射源の方向・位置を特定すると共に、電波発射源の方向に基づいてETC路側アンテナから電波発射源までの距離を推定し、車載アンテナから発射される電波の強度を計算する。また、可視化処理結果と上部撮影部15で撮影された車両の上部フロント画像とを重ね合わせた合成画像を作成し、車載アンテナの出力電波強度計算結果と共に表示部18に表示する。
(もっと読む)
精測進入レーダ装置
【課題】管制対象とする航空機を自動追尾できるようにし、これにより管制官の負担を軽減可能な精測進入レーダ装置を提供すること。
【解決手段】飛行場監視レーダおよびレーダ情報処理システムから飛行場周辺の航空機の便名や位置情報などを取り込み、表示装置16にA/N表示する。表示された航空機のうち管制対象機をマウス19により選択指定すると、信号処理部15により生成される空中線制御信号をサーボ制御部18に与え、方位空中線13および高低空中線14のビーム指向方向が管制対象機を追尾するように自動制御するようにしている。このようにしたので、管制官はジョイスティック17等による空中線のビーム制御を行うことなく、管制対象となる航空機を簡単な操作により一度選択するだけでこれを自動追尾できる。従って管制官の負担を軽減でき、管制官は本来の管制業務に専念できるようになる。
(もっと読む)
車両制御装置
【課題】 自車の走行の障害とならない停止物を対象とする不必要な車両制御が行われるのを防止する。
【解決手段】 レーダー装置で検知した先行車との車間距離が所定値以下になると自動制動を行ったり運転者に警報を発したりして衝突の発生を防止するものにおいて、先行車のような移動物を検知するための、レーザーレーダー装置やパルスレーダー装置のようなレーダー装置の反射波の受信レベルの閾値(実線で示す移動物用検知閾値)に対し、停止物を検知するための反射波の受信レベルの閾値(破線で示す停止物用検知閾値)を所定の領域で高く設定する。これにより、自車の障害とならないゲートや路上落下物を検知して障害物であると誤認するのを防止し、ゲートや路上落下物に対して必要のない自動制動や警報が行われるのを防止することができる。
(もっと読む)
車両用通信装置
【課題】消費電力が少なく、電池交換頻度が少ない携帯機の位置特定機能を有する車両用通信装置を提供する。
【解決手段】車両用通信装置は、車両に設置され、電波を受信したとき自身を特徴付ける発信機ID情報を含む変調波を発信する少なくとも1つのID発信機と、上記車両に設置され、上記ID発信機に上記電波を放射する車載器と、上記ID発信機が発信する上記発信機ID情報を含む変調波を受信する携帯機と、を備え、上記携帯機は、受信した変調波を増幅して上記車載器に送信し、上記車載器は、上記携帯機から受信した変調波を復調して得られた上記発信機IDに基づき、上記携帯機の位置を判定する。
(もっと読む)
目標類別装置
【課題】特徴量の信頼性の動的な変動を考慮することで、より高精度な区間値ファジィ推論方式による目標類別を可能とする目標類別装置を得る。
【解決手段】目標観測手段101により類別対象の目標が有する特徴量を得て、特徴量と特徴の度合いを表す入力ファジィ区間値とを関連付けたメンバシップ関数106と、メンバシップ関数106の区間の幅として定義できる特徴の曖昧さを特徴量から信頼性算出処理部108により算出された信頼性係数とを用いて、区間値ファジィ化処理部102により目標観測手段101によって得られた特徴量のファジィ化を行い、入力ファジィ区間値を得て、これから推論処理部103により目標種類の確からしさを表す出力ファジィ区間値を算出し、非ファジィ化処理部104によって算出された出力ファジィ区間値から目標種類を確定し、表示装置105に表示する。
(もっと読む)
地中埋設設備の情報読み取り装置
【課題】リーダライタで発生する電磁誘導信号により地中に設けられたワイヤレスIDタグが通信に必要とする電力を発生し、センサやセンサに付随する電子回路に供給する地中埋設設備の情報読み取り装置を提供する。
【解決手段】地中に設けられ、電磁誘導信号により電力を発生すると共に、無線通信が可能なコイル10Aを有する電磁誘導型ワイヤレスIDタグ10と、ワイヤレスIDから供給される電力で作動する電源回路8Aと、電源回路に接続され、地中に埋設された設備の状況をセンシングするセンサ装置6と、センサ装置からの信号を読み取る制御装置8A及び制御装置で読み取った信号を保存する記憶装置8Dと、制御装置で読み取った信号を無線信号として出力する送受信回路8Eと、地上に設けられ電磁誘導信号を発生させるコイル12Aを有し、ワイヤレスIDタグと無線通信するリーダライタ装置12とを備えた構成とする。
(もっと読む)
測位システム、探知装置、測位装置、測位システムの測位方法、探知装置の探知方法、測位装置の測位方法、探知装置の探知プログラムおよび測位装置の測位プログラム
【課題】目標物を測位するために探知装置と測位装置との間で必要な通信帯域を少なくする。
【解決手段】基準信号送信装置120が目標10に向けて送信波30を発信し、各探知装置100は送信波30が目標10で反射した反射波32を受信する。各探知装置100は受信した反射波32に基づいて基準信号送信装置120が送信波30を送信してから探知装置100が反射波32を受信するまでの時間を算出し、算出した時間のみを特徴情報として測位装置140に送信する。測位装置140は各探知装置100から受信した各特徴情報に基づいて基準信号送信装置120から目標10を経由した各探知装置100までの距離を算出し、算出した距離と基準信号送信装置120の座標と各探知装置100の座標とに基づいて目標10の位置を測位する。
(もっと読む)
無線受信装置、無線タグ通信装置、及び無線受信装置の補正方法
【課題】フェイズドアレイ処理における移相量の補正を容易に実行し得る無線受信装置を提供する。
【解決手段】受信アンテナユニット24に備えられた複数のアンテナ素子54のうち一部のアンテナ素子54により受信される基準信号源からの信号に基づいて、合波部68等における位相が所定の移相となるように各移相部56における移相量を補正する制御を行うアンテナユニット制御部52を備えたものであることから、複雑な処理を行うことなく簡単な構成により各アンテナ素子54に対応する移相量の補正を行うことができる。すなわち、フェイズドアレイ処理における移相量の補正を容易に実行し得る無線受信装置を提供することができる。
(もっと読む)
リフレクタ
【課題】他車両に設置されたリフレクタからの反射波であるのか、それとも路面や道路周辺に位置する構造物からの反射波であるのかを区別しやすくするよう設置されるリフレクタを提供すること。
【解決手段】リフレクタ2をトランクドア後壁31において上縁且つ幅方向中央に設置する。リフレクタ2の高さ方向の取り付け位置をトランクドア後壁31の上縁とすることにより、リフレクタ2を、路面に位置してミリ波をよく反射する構造物から大きく離すことができる。また、リフレクタ2の車両幅方向の取り付け位置を車両幅方向中央とすることにより、道路の左右どちらの側方にも存在する可能性があるミリ波反射構造物からの平均距離を最も大きくすることができる。その結果として、他車両に搭載された車両検知器1は、リフレクタ2からの反射波であるのか、それとも前述の構造物からの反射波であるのかを区別しやすくなる。
(もっと読む)
IDドップラー移動検出器
無線周波識別(RFID)検出システムに用いられるRFIDリーダーのためのシステム及び方法。リーダーは、RF信号を生成するRF源を有する。アンテナがRF源に接続されている。このアンテナは、呼掛領域内の一つ以上のRFIDマーカーに呼掛RF信号を送信し、且つ呼掛領域内の一つ以上のアイテムから交信信号を受信する。その交信信号は、呼掛領域内のアイテムの移動を示すドップラー信号を含む。受信機は交信信号を受信し、運動検出回路系はドップラー信号を検出する。 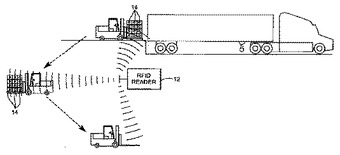 (もっと読む)
(もっと読む)
221 - 240 / 392
[ Back to top ]