
Fターム[5J070AK13]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833)
Fターム[5J070AK13]の下位に属するFターム
Fターム[5J070AK13]に分類される特許
281 - 300 / 392
レーダ装置
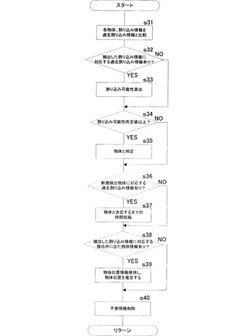
【課題】検出エリア外に外れる物体についてその存在位置を推定し続けることができ、かつ検出エリア外から検出エリア内に侵入してくる障害物などを早期に検出することができるレーダ装置を提供する。
【解決手段】レーザレーダ装置(車両用測距装置)は、レーザ光を2次元スキャンするスキャナ13と、制御回路11とを備えている。制御回路11は、スキャナ13の検出エリア左右端において、片斜面分布を抽出する。この片斜面分布の距離値、受光レベル、検出領域幅、および面積値からなる割り込み情報を記録する。今回のフレームで抽出した割り込み情報を過去の割り込み情報と比較し、割り込み可能性を算出する。この割り込み可能性に基づいて検出エリア外からの侵入車両を早期に検出する。
(もっと読む)
小便器洗浄装置及び小便器洗浄システム

【課題】マイクロ波ドップラセンサの動作をランダム周期で間欠的に行う場合においても、蛍光灯などからのノイズによる誤動作を抑制することができる小便器洗浄装置を提供すること。
【解決手段】ボール部に向けて電波を送信し、その反射波を受信してドップラ信号を生成するマイクロ波ドップラセンサを有し、ドップラ信号に基づいてボール部内に洗浄水を供給する小便器洗浄装置において、ランダムな不等間隔サンプリング周期でマイクロ波ドップラセンサを間欠動作させるセンサ制御手段と、サンプリング周期で出力されるドップラ信号を順次A/D変換してドップラ信号データを生成するA/D変換手段と、ドップラ信号データを所定の等間隔サンプリング周期のデータへ補間する周期補間手段と、補間した前記等間隔サンプリング周期のデータに含まれるノイズを除去するデジタルフィルタとを備えた。
(もっと読む)
レーダ装置
【課題】対象物との距離および対象物のレーダ断面積を精度良く算出することを必要とせずに、容易かつ精度良く対象物を識別可能なレーダ装置を提供する。
【解決手段】レーダ装置1に、送信強度(電力)の異なる二つの信号11・12を所定の時間差で発生する発生部2と、信号11・12を対象物に向けて送信する送信部3と、前記対象物により反射された信号21・22を受信する受信部4と、信号21・22の受信強度(電力)の差ΔPrに基づいて対象物の種類(ヒト、車両、大型車両)を識別する識別部5と、を具備した。
(もっと読む)
構造物形状推定装置、障害物検出置および構造物形状推定方法
【課題】構造物の形状を精度良く推定することができる構造物形状推定装置、障害物検出装置および構造物形状推定方法を提供すること。
【解決手段】自車両の進行方向に存在する構造物の形状を推定する構造物形状推定装置において、自車両進行方向に存在する物体の位置を検出する前方ミリ波レーダ3と、自車両進行方向に存在する物体の位置を検出する前方ミリ波レーダ3と検出方法が異なる画像検出装置4と、前方ミリ波レーダ3により検出された物体の位置に基づいて、近似領域を設定する近傍領域設定部21と、この前方ミリ波レーダ3により検出された物体の位置およびこの設定された近似領域内の画像検出装置4により検出された物体の位置に基づいて構造物の形状を推定する構造物形状推定部22と、を備える。
(もっと読む)
物体検出装置
【課題】レベルの異なる2つの閾値を用いて高閾値物体と低閾値物体とを検出する場合の検知感度の拡大と物体検出の信頼性の確保とが可能な物体検出装置を提供すること。
【解決手段】検出された高閾値物体候補数Hth_Numと低閾値物体候補数Lth_Numとの総和が検出結果として出力可能に設定された所定の最大物体数Nmaxを超える場合に(ステップS4:Yes)、高閾値物体候補からの選択が優先されるように高閾値物体候補および低閾値物体候補からの選択処理を割り振って高閾値物体および低閾値物体を検出結果として選択するようにした(ステップS6〜S10)。
(もっと読む)
レーダ装置
【課題】近接する複数の低反射物体、高反射物体の速度差が大きい場合であっても、それぞれの正確な距離を測定することができるレーダ装置を提供する。
【解決手段】CPU18は、可変利得アンプ16のゲインを最大に設定してレーザ投光を指示し、受光強度をメモリ19に格納する。その後、可変利得アンプ16のゲインを低ゲインに設定してレーザ投光を指示し、受光強度をメモリ19に格納する。低ゲイン時の受光強度に最大ゲインと低ゲインの割合にあたる値を乗算し、この乗算値と最大ゲイン時の受光強度とを比較して、最大値を合成受光強度として採用する。
(もっと読む)
コンクリート構造物及びそれ以外の構造物の非破壊検査方法
【課題】電磁波を用いた短時間で高精度、高信頼性を有するコンクリート構造物及びコンクリート以外の構造物の非破壊検査方法を提供する。
【解決手段】コンクリート構造物11の表面12に対向して設けた電磁波の送信アンテナ13から電磁波をコンクリート構造物11に向けて発信し、コンクリート構造物11の内部に存在する非コンクリート体15で反射した電磁波をコンクリート構造物11の表面12に対向して設けた受信アンテナ16で受波信号として検出して、コンクリート構造物11の内部の一つ以上の非コンクリート体15で反射した反射波から形成される受波信号の波形と、コンクリート構造物11の内部の一つ以上の非コンクリート体15の存在から理論的及び/又は実験的に予測される予測受波信号の波形とのパターンマッチングを行うことにより、非コンクリート体15の検出を行う。
(もっと読む)
物体検出装置
【課題】撮像手段による瞬間的に不安定な検出結果によりフュージョン物標の大きさ情報を適正に取得できない場合であっても、その影響を極力受けることなくフュージョン物標を更新すること。
【解決手段】生成されたフュージョン物標FPの更新時に、レーダ物標MPは検出できたが、撮像手段では瞬間的な画像ロストを生じて大きさ情報を適正に取得できなくても、撮像手段の検出結果に誤りがあり前回の検出物体が存在すると推定して、大きさ情報が過去に取得した該フュージョン物標FPの大きさ情報に基づく推定により補間された補間画像物標LIP1〜LIP4を用いて画像ロストフュージョン物標LFP1〜LFP4を生成してフュージョン物標FPを更新する。
(もっと読む)
電波探知装置
【課題】警報受信機能を有する電波逆探知装置において、監視受信モード(目標捜索)の受信タイムスケジュールに影響を及ぼすことなく、警報識別の確実性を向上させることを目的とする。
【解決手段】受信したレーダ波の周波数、パルス幅、パルス繰返し間隔の諸元を検出し、これを予め蓄えておいたレーダ波の諸元データに基いて合致判定を行い、識別候補中に警報対象目標を含んでいる場合には、警報受信スケジュールを変更すると共に、自機へのロックオン有無を判別して、再度、警報対象か否かの合致判定を行うようにしたものである。
(もっと読む)
観測エリア内における人員管理方法及びそれに用いる靴
【課題】無線ICチップを利用して個人の詳細位置をリアルタイムで把握する際に使用する電磁波の強度を低減させる方法を提供する。
【解決手段】アンテナコイルを備え磁場変動により充電が可能な蓄電池と個人の識別番号を記録・発信可能な無線ICチップを内蔵した構内靴を個人へ貸与する。個人の識別番号の発信は構内靴に内蔵した無線ICチップから蓄電池からの電源供給により行い、個人の識別番号の受信は床面に設置した信号読取り装置により検知する。
(もっと読む)
レイアウト・スキャンニング・システム
【課題】 バッテリーを不要として安価な確実にファシリティーの位置を確認把握できるレイアウト・スキャンニング・ システムを提供すること。
【解決手段】本システムは、探索対象ファシリティー3上に貼付されICタグ5と、ICタグ5との間で通信を行うアンテナ71を含む通信手段7と、探索対象ファシリティー3の存在する空間上部に設置され搭載しているアンテナ71を探索対象ファシリティー3上で移動させるスキャンニング機構9と、アンテナ71からのスキャン情報およびスキャンニング機構の位置情報とを基に概算位置を算出する位置算出手段13と、位置算出手段13からの概算位置とICタグ5からの情報を取り込み、ICタグ5の情報を基に、各種データベースから取り出したデータで概算位置を補正処理をしてレイアウトデータを形成する情報処理手段15とを備えたものである。
(もっと読む)
目標類別装置
【課題】蛇行目標の類別性能を向上させる目標類別装置を得る。
【解決手段】追尾情報の目標の距離で受信信号の位相補償を行い、補償後の信号に基づき算出したドップラー周波数により補償後の信号を更に位相補償し、再補償した信号に基づきドップラープロフィールを生成し、追尾情報、上記変化量率から推定したアスペクト角の変化量に基づいてドップラープロフィールをクロスレンジプロフィールに変換し、追尾情報に基づいて推定したアスペクト角に対応する候補目標の受信信号をライブラリから抽出して候補目標のドップラープロフィールを算出し、該ドップラープロフィールをアスペクト角の変化量に基づいて参照プロフィールに変換し、両プロフィールに基づいて観測目標と候補目標の特徴量をそれぞれ算出し、両特徴量を比較して目標類別を行う。
(もっと読む)
レーダ装置
【課題】受信信号のパワースペクトルに現れるJEMの周期性に着目して、JEM発生の有無を検出する有効な方法を適用したレーダ装置を得ることを目的とする。
【解決手段】受信信号のパワースペクトルを算出するパワースペクトル算出部と、算出されたパワースペクトルの自己相関関数を算出する自己相関関数算出部と、算出された自己相関関数を、当該自己相関関数から算出した標準偏差に基づいて設定した閾値と比較することにより目標に回転体が存在するか否かを判定する判定部を備える。
(もっと読む)
無線タグ及び無線タグシステム
【課題】UWB技術を用いた通信方式を採用する無線タグ及び無線システムにおいて、コストの低減および消費電力の低減を図ることのできる無線タグ及び無線タグシステムを提供することを目的とする。
【解決手段】無線タグ2のタグ信号生成部23は、無線タグリーダ1から受信した変調ビーコン信号を、タグIDを用いて変調することにより、タグID変調信号を生成し、出力する。このタグID変調信号は、バンドパスフィルタ22、アンテナ21を経由して、無線タグリーダ1へ送信される。このように、無線タグリーダ1から受信した復調ビーコン信号自体を、タグIDを用いて変調するので、復調器やパルス信号発生器等を無線タグ2に設ける必要がなくなり、コストの低減及び消費電力の低減を図ることができる。
(もっと読む)
物品の定位置確認システム、物品の定位置確認方法及び異常箇所検出方法
【課題】複数物品が予め決められた間隔及び順番を保って存在していることを確認できる技術の提供。
【解決手段】管理装置12と、第1のダクト16に貼着された第1のRFIDタグ18と、第2のダクト20に貼着された第2のRFIDタグ22からなる物品の定位置確認システム10。管理装置12は、自己のID及び第2のRFIDタグ22のIDを格納する記憶手段を備え、自己のIDを電波で放射した後、第2のRFIDタグ22のIDを受信した場合に正常と判定し、受信できない場合には異常と判定する。各RFIDタグは、自己のID及び送信側IDを格納するメモリと、送信側IDを受信した場合に自己のIDを電波で放射する機能を備え、その電波出力は予め設定された距離間でのみ通信可能に設定されている。第1のRFIDタグ18のメモリ36には管理装置12のIDが送信側IDとして設定されており、第2のRFIDタグ22のメモリ36には、第1のRFIDタグのIDが送信側IDとして設定されている。
(もっと読む)
移動体監視システム
【課題】一定の地域内において、監視対象である移動体の、侵入の事実を長期間に亘って監視し、人間がその監視対象を容易に捕捉できるシステムを構築する。
【解決手段】監視対象である移動体が有するICタグ11が発信する固有のID情報を含む信号を検知する検知範囲13を有するICタグリーダ12、及び、前記のICタグ11が存在する位置範囲を出力する出力手段を有する移動体監視システムを構築する。
(もっと読む)
携帯端末の位置検出方法、携帯端末の位置検出システム及び携帯端末を利用したセキュリティシステム
【課題】 屋内であっても携帯端末の位置を検出する位置検出システムを得る。
【解決手段】 携帯端末が発信する電波を受信する受信機を屋内に複数配置した受信機網と、前記受信機網と前記携帯電話とにネットワークを介して接続され前記携帯端末の位置を管理する管理端末とを有し、管理端末は、コマンドを受信した受信時刻と前記コマンドを受信した前記携帯端末のIDとを通知をさせるコマンドを送信し、前記コマンドを受信した前記携帯端末は、受信時刻と自己の携帯端末IDとからなる受信通知を前記管理端末に対して送信し、前記携帯端末が送信した前記受信通知の電波を検知した受信機は、前記電波を検知した検知時刻と自己の受信機IDとからなる検知通知を前記管理端末に送信し、前記管理端末は、受信時刻と携帯端末IDと、検知時刻と前記受信機IDとに基づいて前記携帯端末の位置を特定するようにした。
(もっと読む)
車両検出装置及び車両検出方法
【課題】道路上における車両の存在状態の検出について、周囲の環境や時間帯の影響を受けにくくすることができる車両検出装置を提供する。
【解決手段】記憶手段5は、送信アンテナと受信アンテナ2との間の所定区間における車両の存在状態についての車両存在情報、及び、この状態における伝搬路の対応伝達行列を、複数パターンについて相互関連付けて対応情報として記憶している。受信アンテナ2で受信した受信信号に基づいて伝搬路の伝達行列を算出する。記憶手段5に記憶させてある前記対応伝達行列のうち、この算出した伝達行列に略一致する対応伝達行列を選択する。記憶手段5の対応情報に基づいて、選択した対応伝達行列に対応している車両存在情報を抽出する。これにより車両存在情報に対応している車両の存在状態を知ることができる。
(もっと読む)
会合検出装置および方法
【課題】人位置検出センサの最小単位として捉えられる空間分解能を超えた狭い範囲に併存する会合を検出することができるようにする。
【解決手段】位置情報取得部101は、移動体ID、エリアID、所在の継続時間の始期、終期からなるエリアコンテキストを取得する。同時的位置情報抽出部102は、エリアコンテキストを参照して同時的なコンテキストを抽出する。準同時的位置情報抽出部103は同時的と同視できるコンテキストを抽出する。会合情報検出部104は同時的なコンテキストから形成したコンテキストグラフの極大な完全部分グラフを判別してそれぞれ会合情報として検出する。
(もっと読む)
スワスSAR用の効率的なオートフォーカス方法
可動レーダは、パッチから反射された周期的なパルス反射波からパッチの探索モード合成開口画像を生成する。パッチは2以上のオーバーラップするアレイから得られるレーダ反射波から画像化される。強力な散乱体が各アレイ内で突き止められ、その後各アレイからのデータはレーダの運動と強力な散乱体に関して運動補償される。各アレイの運動補償された結果は各アレイの位相誤差を得るためにオートフォーカスされる。各アレイの位相誤差を使用して、接続された位相誤差評価が計算され、各アレイの位相誤差に加算され、アレイ間のオーバーラップで位相間の差を最小にし、アレイ間のオーバーラップ領域には位相不連続性が全く存在しないか最小であることを保証する。位相の不連続性の防止はパッチをレンダリングするアレイの組み合わせのクリアなSAR画像を生成する。 (もっと読む)
281 - 300 / 392
[ Back to top ]