
Fターム[5J070AK33]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 利得制御 (47)
Fターム[5J070AK33]に分類される特許
21 - 40 / 47
レーダ装置及び信号のlog変換方法
【課題】受信した信号のダイナミックレンジの拡大を簡単な構成で行なうことができるレーダ装置を提供する。
【解決手段】受信信号の振幅値を表すlog波形を検出するlog検波器132aと、受信信号の周波数および位相を表わす位相波形を検出する位相検波器132bと、log検波器132aで検出されたlog波形で表される振幅値に応じて、位相検波器132bで検出された位相波形の振幅を調整するゲイン調整器132dとを備える。
(もっと読む)
電波センサ

【課題】センサ前方に存在する被検知体の有無や移動状態を精度良く検出する、電波ビームの放射方向を制御しS/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】送信信号を生成する発振回路9と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極2と、他方の表面に形成された、送信信号を電波ビームとして前方に放射する矩形状の送信電極3と、送信電極3から放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の受信電極4と、何れか一方の端子が接地電極2のみに接続され、受信電極4にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6とを備え、検波素子5の他方の端子と出力線路6は受信電極4の異なる位置に各々、接続される。
(もっと読む)
目標信号を妨害する装置及び方法
様々な応用分野において、地理的な意味で大きく制限され、無線信号の確実な妨害を保証する無線信号妨害装置を有することが望ましい。本願は、少なくとも1つの通信デバイスへ送信された目標信号を検出する少なくとも1つの検出デバイスと、妨害信号によって目標信号を妨害する少なくとも1つの妨害デバイスと、妨害デバイスを制御するため妨害デバイスへ通信可能に接続される制御デバイスと、少なくとも1つの妨害デバイスを制御する制御デバイスは、妨害デバイス及び/又は通信デバイスの送信電力を決定するための少なくとも1つの入力信号を受け取ることとを備える妨害装置を提供することによって、この問題を解決する。したがって、本発明の背後にある中心的アイデアは、動的な方法で妨害信号を調整することである。かくして、目標信号を送信するデバイスの効率的な妨害は、保証される。 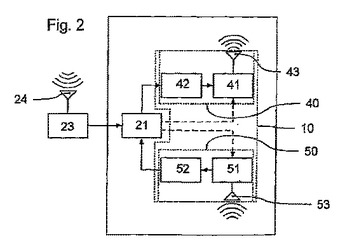 (もっと読む)
(もっと読む)
レーダ模擬信号発生器
【課題】 局部発振器のリーク信号の影響を受けることなく模擬信号のダイナミックレンジの拡大を図ることができるレーダ模擬信号発生器を提供する。
【解決手段】 波形データ発生器1はIデータとQデータから得られる最大振幅値を最大振幅検出回路9で検出して出力する。この最大振幅値のデータをミクサ5a,5bで局部発振信号により周波数変換し、混合器6で混合し、帯域通過フィルタ7でろ波し、増幅器8で増幅する。振幅補正演算回路10は最大振幅値とIデータ及びQデータの振幅値とから振幅補正値を演算し、振幅制御回路12はこの振幅補正値に基づいて増幅器8から出力する高周波信号を振幅制御して模擬信号を出力する。高周波信号のレベルを局部発振器のリーク信号のレベルよりも高くでき、模擬信号に対するリーク信号の影響を解消し、模擬信号のダイナミッグレンジを拡大する。
(もっと読む)
自動利得制御装置
【課題】自船の位置する海域に応じた利得制御を自動的に行うことができる自動利得制御装置を提供する。
【解決手段】自船位置が、岸壁、防波堤、桟橋、船などの人工構造物が多数存在する港の周辺や港の内部、運河等の海域(港湾エリア)内にあるのか否かを判定部11により判定し、当該判定結果に基づいて閾値算出部12が自動的に閾値算出アルゴリズムを切替える。これにより、洋上においても港内においても、設定変更や感度調整などの操作を実行することなく、最適な感度のレーダ映像を得ることができる。
(もっと読む)
車両
【課題】 誤検出することなく前方の車両や物体を検出できる衝突防止用のセンサを備えた車両を提供すること。
【解決手段】 ゴルフカート10に、追突防止センサと障害物センサ33a等を設けた。追突防止センサは、後方に電波aを発信する送信器31と、前方のゴルフカート10aとの距離が一定距離以内になったときにゴルフカート10aの送信器31から発信された電波aを受信する受信センサ32とからなる。障害物センサ33a等は、電波aの発信距離よりも長い距離に亘って前方に超音波bを発信し、物体に衝突して戻ってくる超音波bを受信することにより前方の物体を検出する。そして、受信センサ32が電波aを受信したときにゴルフカート10は停止し、受信センサ32が電波aを受信せず、障害物センサ33a等が物体を検出したときにゴルフカート10は低速走行するようにした。
(もっと読む)
車両における交通環境を検出するためのレーダセンサ
【課題】交通状況に応じて車両用レーダセンサの送信および/または受信動作におけるセンサ感度を調整可能にする。
【解決手段】調整可能な送信および/または受信増幅器22、30と、送信および/または受信ゲインを調整するための調整装置34とを備えるレーダセンサにおいて、アナログ/デジタル変換器24を通過したデジタル受信信号を解析回路26において解析し、車両環境デジタル測定データを連続して評価して、目下の評価に従って調整装置34に作用する評価装置32を備えた。
(もっと読む)
レーダ装置
【課題】環境によって時々刻々と変化するノイズレベルの情報を生成し、生成した情報に基づいて受信感度調整や相関処理などの処理を行うレーダ装置を提供することを目的とする。
【解決手段】探索領域内に予め定めた分割領域毎にノイズ優勢領域か物標エコー優勢領域かの判定を行い、ノイズ優勢領域と判定された領域の受信信号を用いてノイズレベルを算出する。これにより、物標エコーとノイズとを分離するための適正な値を算出することが可能になる。また、ノイズ優勢領域で算出したノイズレベルを補間或いは外挿することによって他の領域のノイズレベルを算出する。これにより、レーダ探索領域全域にわたって適正なノイズ分布を得ることが可能になる。
(もっと読む)
追尾復調受信装置および該追尾復調受信装置による誤差信号生成方法
【課題】オーバーシュート無しに素早くアンテナを追尾対象の方向に指向させる。
【解決手段】本発明の追尾復調受信装置は、アンテナから入力された和信号および差信号を基に、アンテナの現角度と目標角度との角度誤差を表す角度成分信号を生成する角度成分信号生成手段と、角度成分信号生成手段で生成された角度成分信号を角度誤差に応じた利得で増幅して誤差信号として出力する可変利得増幅手段と、を有する。
(もっと読む)
自動利得制御装置
【課題】環境によって時々刻々と変化するノイズレベルに追従した受信感度調整を行うことができる自動利得制御装置を提供する。
【解決手段】受信信号レベルのサンプリングデータからヒストグラムを作成し、該作成したヒストグラムの形状から所望のノイズ発生確率となるような閾値レベルを選択する。ヒストグラムの形状は、予め用意した参照分布関数を用いて特定することが好ましい。これにより、他のレーダの干渉波や、物標からのエコーがサンプリングデータ中に含まれているような場合であっても、これらの影響を受けず、最適な閾値を算出することができる。
(もっと読む)
レーダ装置とそのSTC処理方法
【課題】非チャープ信号とパルス圧縮処理後のチャープ信号との間の振幅差を均一化する。
【解決手段】非チャープ信号による近距離用パルスを送信した後、チャープ信号による遠距離用パルスを送信してそれぞれのパルスの反射信号を受信して得られるレーダ信号に、STCを施した後(41)、非チャープ領域処理(52)及びチャープ領域処理(53)を独立して行い、それぞれの処理結果を所定のレンジで結合する(58)。この場合に、STC(41)に対して、近距離用の減衰量特性を持つ制御信号を生成して近距離に相当する非チャープ信号処理期間に与え(54)、遠距離用の減衰量特性を持つ制御信号を生成して遠距離に相当するチャープ信号処理期間に与え(55)、両減衰量特性の差分を算出し(56)、その算出結果に基づいてレンジ結合前の非チャープ領域処理の出力レベルを補正する(57)。
(もっと読む)
等価時間サンプリング方式レーダ
【課題】受信信号の信号強度を距離によらずに等化するための新規な手法を提供する。
【解決手段】受信信号の信号強度を等化するために、振幅が可変である電力制御信号を生成する電力制御信号発生部2と、電力制御信号の振幅に応じて利得を調整することによって、パルス列状の送信信号の送信電力を制御する増幅部4とを送信側に設ける。
(もっと読む)
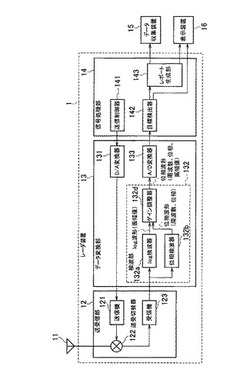
レーダ装置
【課題】受信信号の減衰処理を比較的容易な回路構成で実現可能であり、また調整も容易なレーダ装置を提供する。
【解決手段】受信信号の減衰処理をSTC回路141のみに頼らずに信号処理装置15のレベル減衰部152で分担して実行するようにし、またSTC回路141において探知距離に亘って減衰量を徐々に減少させる必要がなく、STC制御信号(1)の各分割時間範囲ごとにその固定値に基づいて受信信号を減衰するようにしている。また、レベル減衰部152において設定する減衰量を時間変化に対し一定の傾きをもった変化で制御するようにしている。
(もっと読む)
レーダ装置
【課題】希望波以外の妨害波に対する自受信機のダイナミックレンジを拡大することのできるレーダ装置を提供。
【解決手段】信号処理部20にて検出される妨害波位相データを信号処理部20内の位相調整器28にてタイミングを調整し、さらにI/Q信号切替スイッチ42および直交変換器48において、位相0−πおよび位相π/2−3π/2の2つの位相変調を切り替えて、自装置10から発した送信波がターゲットにて反射した反射波である希望波を受信する際、複数のレーダ波が存在する場合、周辺の他のレーダ装置から発せられる最大妨害波のレベルを抑圧して、希望波以外の妨害波に対する自受信機のダイナミックレンジを拡大する。
(もっと読む)
距離撮像
【課題】多数の距離画素を用いて距離像を撮像する。
【解決手段】撮像されるべき各々の距離像のためにアレイ配置された複数の送信器を使用して電磁波がそれぞれ送信パルスの形で送信され、反射されたエコーパルスはアレイ配置された複数の受信器を使用して検出され、前記送信パルスが反射されて距離画素を形成する物体のそれぞれの距離は前記パルス飛行時間の算出によって測定され、撮像されるべき各々の距離像のために前記受信アレイの後に接続された時間測定器を使用して複数の個別測定が実施される。
(もっと読む)
車両の障害物検知装置
【課題】必要性の高い近くの物標を優先的に検出することができる車両の障害物検知装置の提供。
【解決手段】自車両の前方の障害物を検知する障害物検知手段11と、障害物検知手段の障害物の検知感度を変更する感度変更手段12と、を備え、感度変更手段12は、自車両から所定距離以遠の障害物を検知するときの検知感度T1を、所定距離より近くの障害物を検知するときの検知感度T2よりも低くする。
(もっと読む)
無線受信装置と無線受信方法
【課題】 必要とするダイナミックレンジ総てに最適なADC入力レベルを瞬時に対応させることができるようにする。
【解決手段】 無線受信信号を互いに異なる比率で2系統に分波し(13)、各系統(16〜22,23〜29)でそれぞれ不等分分波された信号を互いに独立して検波してデジタル信号に変換し、各系統の処理結果を選択的に取り込んで復調出力(30,31)するものとし、要求ダイナミックレンジについて比率によって各系統が受け持つ利得範囲を割り当てるようにした。
(もっと読む)
周辺監視システム
【課題】二輪車までの距離を安定的に精度良く計測する「周辺監視システム」を提供する。
【解決手段】他車認識部3によってカメラ2が撮影した画像b2中の自動二輪車400が、初めて認識されると(a2)、画像b2中の自動二輪車400が写り込んでいる領域410のサイズW2が基準サイズSとして設定され、レーダ装置1で測定した自動二輪車400の相対距離L2が基準距離Dとして設定されることになる(a2)。以降の各時点a3、a4、a5では、他車認識部3によって認識された画像b3、b4、b5中の自動二輪車400が写り込んだ領域410のサイズW3、W4、W5に対する、基準サイズSの比と、基準距離Dに基づいて、各時点における自動二輪車400の相対距離L3、L4、L5を算定する。
(もっと読む)
STC波形設定装置及びSTC波形設定方法
【課題】各現場に合わせて最適なSTC波形を簡単に設定することができるSTC波形設定装置及び方法を提供する。
【解決手段】物標までの距離即ち受信時間の区間と対応づけられるアドレスを設定するアドレス設定部34と、直流信号を出力して、該直流信号の強度によりレーダ装置の受信電力を制御可能となった利得可変増幅部38と、該利得可変増幅部38の直流信号の強度を調整する利得調整部40と、利得可変増幅部38からの直流信号をデジタル値にA/D変換するA/D変換部44と、アドレス設定部34で設定されたアドレスに対応づけて前記デジタル値を格納する記憶部46と、を備え、該デジタル値をSTC波形の設定値とする。
(もっと読む)
小便器洗浄装置
【課題】このような調整作業をせずとも人体検出や尿流検出の性能を確保すると共に、施工現場で簡単に自動設定することができる小便器洗浄装置を提供すること。
【解決手段】小便器の内側又は背面側に設けられたマイクロ波センサと、このマイクロ波センサからのセンサ出力信号を増幅する増幅部と、この増幅部によって増幅されたセンサ出力信号の交流電圧成分から対象物検出周波数成分を抽出する対象物検出抽出部と、この対象物検出抽出部の出力に基づいて対象物検出を行う制御部とを備えた小便器洗浄装置において、センサ出力信号の直流電圧成分の電圧レベルに応じて、増幅部の増幅率を変更する。
(もっと読む)
21 - 40 / 47
[ Back to top ]