
Fターム[5J070BB02]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468) | 角度追跡 (57)
Fターム[5J070BB02]に分類される特許
1 - 20 / 57
レーダ通信装置
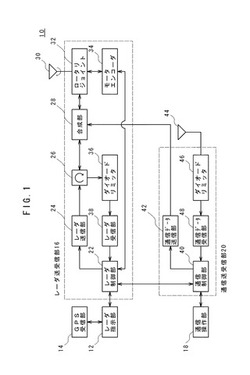
【課題】空中線が回転している他船の船舶と、データ通信可能なレーダ通信装置を提供する。
【解決手段】レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部16と、通信データの送受信を行う通信送受信部20とを備え、前記通信データを前記レーダ波に合成して送受信することにより空中線が回転する他船と通信するレーダ通信装置であって、前記通信データを受信し、受信した前記通信データを通信送受信部20に供給する通信用空中線44を有する。レーダ送受信部16は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信用空中線44は、無指向性である。
(もっと読む)
目標追跡システムとそのプログラム及び方法、角度追跡装置とそのプログラム及び方法、目標追跡装置とそのプログラム及び方法

【課題】装置規模の縮小、処理時間の短縮を実現する。
【解決手段】目標追跡装置13において、角度追跡装置12−iから2次元観測値と2次元航跡の対が入力されると、予測処理部131により、維持している3次元航跡から2次元予測値を算出し、相関処理部132により、算出された2次元予測値と角度追跡装置12−iからの2次元観測値の相関の有無を判定し、相関がないと判定された場合、2次元航跡抽出部133により、相関がないと判定された2次元観測値の対となる2次元航跡を抽出し、3次元航跡生成部134により、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡に基づいて、3次元航跡を生成する。一方、相関があると判定された場合、平滑処理部135により、相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する。
(もっと読む)
追尾装置
【課題】センサと目標との距離が大きい場合には追尾維持性能を発揮し、センサと目標との距離が小さい場合には、各追尾目標に対する追尾精度を向上させる。
【解決手段】センサを介して2つの観測値を取得した場合に、センサ位置を基準点とした2つの観測値のなす角度を算出する角度算出部21と、角度算出部21により算出された2つの観測値のなす角度に基づいて2つの観測値に対する重み係数を算出し、重み係数に基づいて各観測値の各観測値間での重心をそれぞれ算出する角度基準重心算出部22と、角度基準重心算出部22により算出された各観測値の重心および各追尾目標に対する予測値に基づいて、各追尾目標に対する平滑値を算出する平滑処理部24とを備えた。
(もっと読む)
レーダ装置、データ処理方法、及びデータ処理プログラム
【課題】短い観測時間でマルチパス環境下において高度を推定する、レーダ装置、レーダ制御方法、及びレーダ制御プログラムを提供する。
【解決手段】空間に送信信号を送信し、前記空間内の目標物から反射された受信信号を受信する送受信部と、前記受信信号に基づき前記目標物の高度情報を計測する位置計測部と、を備えるセンサ部を複数個備え、分散算出部は、前記複数個の全部又は一部のセンサ部を含む組み合わせ毎に、前記計測された高度情報の分散を算出し、データ選択部は、前記算出した分散が最小となるセンサ部の組み合わせを選択し、選択した組み合わせに含まれるセンサ部が計測した高度情報に基づき前記目標物の高度情報を決定することを特徴とする。
(もっと読む)
飛しょう体の誘導装置
【課題】飛しょう体ロール時の空間安定性の劣化をさらに改善したAZEL切替測角方式の飛しょう体の誘導装置を提供する。
【解決手段】第1の方向の信号と第2の方向の信号とから異なるタイミングにて検出した第1の方向の補正前推定目視線角と第2の方向の補正前推定目視線角を算出し、機体レートとビーム指向角と第1のタイミングから第2のタイミングまでの時間間隔とから推定目視線角の変動量を算出し、変動量により第1の方向の補正前推定目視線角と第2の方向の補正前推定目視線角とを補正して第1の方向の推定目視線角と第2の方向の推定目視線角とを算出し、第1の推定目視線角と第2の推定目視線角とから誘導信号を算出する。
(もっと読む)
RFIDタグの動き追跡技術
【課題】RFIDタグの動きを追跡する技術を提供することを目的とする。
【解決手段】
信号強度情報を使用してRFIDタグの動きを追跡する技術である。移動中のRFIDタグから読み取り値の系列を取得するために、RFIDリーダの単一のアンテナが使用されてもよい。信号強度インジケータ(例えば、受信信号強度インジケータ(RSSI))は、読み取り値毎に判定される。RSSIの系列は、RFIDタグの動きの経路と、その経路に沿ったRFIDタグの動きの方向を推定するために使用される。
(もっと読む)
先行車検出装置
【課題】2WS基準システムまたは4WS基準システムにおけるオフセット値に対して、さらに自車に適合する差分量を加算することによって、カーブ路における自車線上の先行車を精度よく検出できる先行車検出装置を提供する。
【解決手段】本発明の先行車検出装置は、自車の車両情報に基づいて当該自車が2WS車か4WS車かを判定する車両判定手段と、自車の前方にある物標の横位置情報を取得する横位置情報取得手段と、2WS車または4WS車に応じて横位置情報を自車のカーブ路における車体スリップ角が0度である直線走行方向基準の横位置情報に換算するオフセット値を算出するオフセット値算出手段と、オフセット値に基づいて横位置情報を直線走行方向基準の横位置情報に換算する直線走行方向基準換算手段と、直線走行方向基準の横位置情報に基づいて自車の前方にある物標が自車の前方にある先行車であるか否かを判定する先行車判定手段とを備える。
(もっと読む)
誘導装置
【課題】ミサイルなどの飛翔体に搭載される誘導装置で、誘導信号の変動および角度追尾のレスポンス悪化を招くことのない誘導装置を得る。
【解決手段】発振器とアンテナジンバルに搭載するフロントエンドに温度センサを取り付け、発振器温度とフロントエンドの温度を実運用する際の範囲で変動させて、発振器温度とDIF系またはSUM系信号位相の温度変動分のデータベースを構築する。同様にフロントエンドに搭載するフロントエンド温度と残りの系のIF信号位相差のデータベースを構築する。構築したデータベースを用いて、線形補間により各部温度からDIF系およびSUM系のIF信号位相の温度変動分を予測する。予測で求められたDIF系、SUM系IF信号の位相差分を位相器で補正することでDIF系、SUM系IF信号位相差を低減することができ、誘導信号の温度による変動を防ぐことができるため、角度追尾のレスポンス低下を防ぐことができる。
(もっと読む)
予測装置及び予測システム及びコンピュータプログラム及び予測方法
【課題】観測対象の将来の位置を高い精度で予測する。
【解決手段】観測装置810(位置観測装置)は、移動体(観測対象)の位置を観測する。ジャイロセンサ820(角速度観測装置)は、移動体の角速度を観測する。バイアス補正部141(角速度誤差推定装置)は、観測装置810が観測した位置に基づいて、ジャイロセンサ820が観測した角速度の誤差を推定する。バイアス補正部141(角速度補正装置)は、推定した誤差に基づいて、ジャイロセンサ820が観測した角速度を補正する。運動状態外挿部180(予測位置算出装置)は、バイアス補正部141が補正した角速度に基づいて、移動体の将来の位置を予測する。
(もっと読む)
複合誘導装置及び複合誘導方法
【課題】パッシブアンテナ素子のレドームによる影響を軽減し、さらには広い周波数帯での測角を実現する。
【解決手段】飛しょう体における略円筒筐体先端の円形領域の中央に配置され、レドーム11を通じて飛しょう体の正面方向からの電波を受信する第1のパッシブアンテナ素子群A11〜A15と、第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部17−20と、第1のパッシブアンテナ素子群の周囲に配置され、レドームを通じて飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群12と、アクティブアンテナ素子群12の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部13〜15と、パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段16とを具備する。
(もっと読む)
電波受信装置及び到来方向測定方法
【課題】ハードウェア規模を増大させることなく、受信電波の到来方向を高精度に測定可能にする。
【解決手段】電波受信装置において、制御部16は、アンテナ選択器9〜12に方位方向及び高低方向のアンテナ4,8,2,6からの受信波を選択させ、信号処理部15に振幅モノパルス方式を用いて到来方向の方位粗測角及び高低粗測角を算出させる粗測角制御と、アンテナ選択器9〜12に方位方向のアンテナ4,8,3,7からの受信波と高低方向に対応するアンテナ1,5,2,6からの受信波とを切り替えて選択させ、信号処理部15に振幅モノパルス方式及びインターフェロメータ方式を併用して到来方向の方位精測角及び高低精測角を算出させる精測角制御とを選択的に行う。
(もっと読む)
高高度長時間滞空無人機とその動作方法
実施形態は、測量および/または信号収集目的の1つまたは複数の電磁気(IR/視覚/RF)センサ素子またはスイート(112、337)を有する1つまたは複数の静止位置保持可能な高高度長時間滞空(HALE)無人機(110)を含む。実施形態は、方向可変レーザー(331)を有する1つまたは複数の静止位置保持可能な高高度長時間滞空(HALE)無人機(110)を含む。実施形態はGPS中継器として構成された4つ以上の高高度長時間滞空(HALE)無人機(611〜614)のグループを含む。 (もっと読む)
目標追跡装置
【課題】追跡精度を向上させることができる目標追跡装置を提供する。
【解決手段】外部から入力される目標の状態ベクトルに基づいて、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出する補正情報算出部5aと、パッシブセンサからの測角データと補正情報算出部からの補正情報とに基づいて、該パッシブセンサを中心とする座標系における目標の航跡を算出する追跡処理部2aを備える。
(もっと読む)
気象現象の自動追尾方法及び自動追尾システム
【課題】積乱雲を含む雷雲等の気象現象をRHI観測により確実且つ自動的に追尾する。
【解決手段】自動追尾システム10において、解析用PC22は、気象ドップラレーダ23が観測した気象現象のエコー強度データに基づくエコー頂高度及び鉛直積算雨水量のプロダクトを用いて、注目したいエコーを追尾対象として自動的に決定し、決定した注目エコーに応じた気象現象に対してRHI観測を行うときの方位角を自動的に算出する。
(もっと読む)
誘導装置
【課題】複数のバンドの周波数の電波を送出することにより小RCS目標の対処性能を向上させる際に、送受信機の大型化を抑えて飛しょう体への搭載が可能な誘導装置を提供する。
【解決手段】誘導装置は、局発信号及びIF信号を励振するとともに局発信号の周波数にIF信号の周波数を加算して得た周波数のハイバンド送信信号とIF信号の周波数と同じ周波数のローバンド送信信号とを生成する共通励振部と、目標で反射して戻ったハイバンド送信信号を受信して得たハイバンド受信信号を局発信号によりダウンコンバートするハイバンドフロントエンドと、ハイバンドフロントエンドから出力されたダウンコンバートされたハイバンド受信信号と目標で反射して戻ったローバンド送信信号を受信して得たローバンド受信信号とが入力される共通受信部と、を備えた。
(もっと読む)
目標追尾装置
【課題】複数のn次元角度センサと目標との交会角が小さな場合でも、追尾安定性を向上させた目標追尾装置を得る。
【解決手段】目標の追尾維持処理開始時の初期値算出にあたって、目標との仮説距離を用いた第1の追尾維持処理と、交会法により算出された距離を用いた第2の追尾維持処理とを並行して動作させ、それぞれの処理で目標航跡を取得しながら、それぞれの目標航跡に対する事後確率を算出し、この事後確率に基づいて2つの目標航跡を選択/統合した統合航跡を継続取得することによって目標の追尾を維持する。
(もっと読む)
レーダ装置、レーダの制御方法、およびプログラム
【課題】操作員が指定した特定方位の目標探知性能や方位分解性能を向上させ、かつ1つの空中線部が機能喪失しても残りの空中線部で方位全周を監視できるレーダ装置を提供する。
【解決手段】フェーズドアレイアンテナを有する空中線部の方位を機械的に変更させるための空中線駆動部を設ける。さらに、各空中線駆動部を制御するための制御データを生成する空中線駆動制御部を設ける。これによって、操作員が表示・操作部から特定方位を指定すると、空中線駆動制御部が、その特定方位にビーム形成するアンテナ開口およびアンテナ素子数を増大させるように空中線部の設定方位を計算し、空中線駆動部を制御して所望の空中線部を回転させる。また、操作員が表示・操作部から機能を喪失した空中線部を指定すると、空中線駆動制御部が空中線駆動部を制御し、機能を喪失した空中線部を除く全ての空中線部によって方位全周の監視を継続的に維持させる。
(もっと読む)
レーダ装置
【課題】高精度で測高を行うことができるレーダ装置を提供する。
【解決手段】ビームを形成してビームデータとして出力するビーム形成部13と、ビーム形成部からのビームデータを積分する検出用積分処理部14と、検出用積分処理部における積分結果に基づき目標を検出する検出処理部15と、ビーム形成部からのビームデータを記憶するビームデータ記憶装置16と、検出処理部で目標の検出に使用されたビームデータを、各々が所定の積分数のビームデータを含む複数の処理単位に分割し、ビームデータ記憶装置から処理単位毎にビームデータを読み出して積分する測高用積分処理部17と、測高用積分処理部における処理単位毎の積分結果に対して処理単位毎に測高演算を行う測高演算部18と、測高演算部における処理単位毎の測高演算によって得られた分割数分の測高値の平均をとって観測された測高値として出力する測高演算制御装置19を備える。
(もっと読む)
レーダ装置
【課題】高い追尾性能を有する小型かつ安価なレーダ装置を提供する。
【解決手段】目標の予測ゲート内で目標からの反射波を、予測ゲート外で目標からの送信波をそれぞれ受信して電気信号に変換し、受信信号として出力する受信部7と、受信部から出力される予測ゲート内または予測ゲート外の1つ以上の受信信号を用いて目標の角度を測定する測角処理部2と、受信部から出力される予測ゲート内で得られた受信信号を用いて目標までの距離および角度を測定する測距・測角処理部3と、測角処理部で測定された目標の角度を表す測角データと測距・測角処理部で測定された目標までの距離および角度を表す測距・測角データとに基づき目標を追尾する追尾処理を実行するとともに、目標の予測ゲートを生成して受信部に送る追尾処理・制御部10を備える。
(もっと読む)
全てディジタルの見通し線(LOS)プロセッサアーキテクチャ
全てディジタルの見通し線(LOS)プロセスアーキテクチャは、セミアクティブ又はアクティブなパルス化された電磁(EM)ターゲット指定システムにおいて使用する受信機の、サイズと、重量と、電力と、性能の制約に対処している。全てディジタルのアーキテクチャは、広い視野にわたる高感度のパルス検出と、適応パルス検出と、LOSの処理と、対策とに対する向上した技術のためのプラットフォームを提供する。 (もっと読む)
1 - 20 / 57
[ Back to top ]