
Fターム[5J070BB15]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡の特徴 (317) | 複数目標の追跡 (82)
Fターム[5J070BB15]に分類される特許
21 - 40 / 82
多目標追尾装置
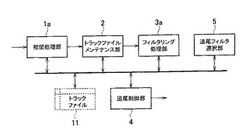
【課題】追尾性能が高く、しかも操作性に優れた小型化可能な多目標追尾装置を提供する。
【解決手段】外部から入力される目標の観測値を用いて複数の目標を追尾する多目標追尾装置において、各目標の状態変数を表す値または相関ゲート内の観測値数の少なくとも1つに基づいて、目標毎に、複数種類の追尾フィルタのいずれを選択するかを判定し、該判定結果に応じた制御信号を生成する追尾フィルタ選択部5と、追尾フィルタ選択部で生成された制御信号によって示される追尾フィルタを実現するための処理を、目標毎に、実行する追尾フィルタ処理部1aおよび3aを備える。
(もっと読む)
個別認識装置及び個別認識システム

【課題】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置と個別認識システムを提供する。
【解決手段】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置であって、センシング中央にセットしてセンサ周囲の環境形状を測定するレーザーレンジファインダと、各物体に貼付されたICタグに記録された情報を蓄積したデータベースと、システム中心から各物体の距離を読み取れるICタグリーダと、レーザーレンジファインダで得た環境形状変化と、ICタグリーダで得たICタグ情報と、システム中心から前記各物体までの距離変化から、データベースに蓄積した情報を元に、各ICタグが添付された対象物情報、位置、移動ベクトルを算出し、各対象物の移動予測を行ない各対象物を認識する判別器から構成した個別認識装置及び個別認識システムである。
(もっと読む)
レーダ装置
【課題】従来のビート周波数の対応付け方法では、目標の探知状況がアップチャープ時とダウンチャープ時で異なりビート周波数のピーク数が合わない場合においては、ビート周波数の対応付けが正確に行えない状況が発生する。
【解決手段】FMCW信号を送信する送信手段1と、受信信号と送信信号とからビート信号を生成する受信手段2と、ビート信号のビート周波数分布を求めるビート周波数生成手段3と、ビート周波数の追尾処理を行うアップチャープ用ビート周波数追尾手段4とダウンチャープ用ビート周波数追尾手段5と、ビート周波数時系列データから目標の距離及び距離変化率を算出するアップチャープ用目標検出手段6とダウンチャープ用目標検出手段7とを設けた。
(もっと読む)
航空機位置測定システム、信号種類判定方法およびセンタ局ならびにプログラム
【課題】航空機位置測定システムにおいて航空機が送信する信号の種類を自律的に判定する。
【解決手段】信号の送信パターンの情報を記憶する送信パターン記憶部7と、信号を全て同種類の信号とみなして受信した後、送信パターン記憶部7に記憶されている送信パターンの情報に基づき、信号の種類を判定する信号種類判定部6とを備える。
(もっと読む)
飛しょう体のレーダ装置
【課題】追跡目標を見失った時や複数の追跡目標が生じた時にも高精度に目標を追跡できる飛しょう体のレーダ装置を提供する。
【解決手段】複数のビームを形成して追跡目標の捜索を行う第1の信号処理部及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部と、を備える。アンテナ制御部60が、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43のうちいずれが信号を処理するかを択一的に切り替え、第3の信号処理部43がMUSIC法を用いて受信信号から複数の追跡目標の方向を推定する。また、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43が並行して追跡目標70の判定と追跡を行う。
(もっと読む)
適合領域検出装置
【課題】二次元以上の領域を検出する場合でも、演算の場合分けを行うことなく、高速に適合な領域を検出することができるようにする。
【解決手段】方向を識別する再帰識別子と方向別の各端点の位置に対応する特徴からなる再帰索引レコードを生成する再帰索引生成部1と、相互に領域の重複関係がある複数の再帰索引レコードを取得し、複数の再帰索引レコードから新たな再帰索引レコードを演算する再帰索引演算部4とを設け、再帰索引検索部5が再帰索引蓄積部2に蓄積されている再帰索引レコードの中から、特徴に関する検索条件に合致する再帰索引レコードを検索する。
(もっと読む)
レーダ信号処理装置
【課題】 追尾レーダによる目標検出において、同レンジに2目標検出された際に、両目標をトラッキングし、そのレンジ及び受信信号強度の挙動を継続して観測する事により真の目標とJEMの判別をすることが可能なレーダ信号処理装置を得る。
【解決手段】 目標で反射された受信電波を観測し、前記目標の検出信号とJEM(Jet Engine Modulation)により変調された検出信号とを判別して、前記目標を検出するレーダ信号処理装置であって、前記受信電波の振幅の比較に基づき前記目標の候補として複数検出された同一レンジセル内にある検出信号の各々について所定時間その強度変化を計測し、前記強度変化が所定の範囲内である検出信号を前記目標の検出信号であると判断し、前記強度変化が所定の範囲を越える検出信号を前記JEMにより変調された検出信号であると判断する目標判別部を備える。
(もっと読む)
同一航跡判定装置
【課題】仮説生成前に同一性を判定できる見込みを推定し、見込みのあるものに対してのみ計算を実行することにより、計算機資源を有効利用し、単位時間に多くの相関結果を出力することができる同一航跡判定装置を得る。
【解決手段】従来の同一航跡判定装置の尤度算出部9に仮説生成判定部10を取りつけ、仮説生成判定部10が、仮説生成を行う前に信頼度の大きな仮説を2つ事前に抽出し、仮説が絞り込めないときに抽出した仮説の比が一定値以上となることを利用して仮説生成の有無を判定し、仮説が絞り込める可能性のある場合には、仮説生成部11に仮説の生成を行わせ、仮説が絞り込める可能性がない場合には、仮説生成部11に仮説の生成を行わせない。
(もっと読む)
目標検出装置、目標検出方法及び目標検出プログラム
【課題】レーダセンサを用いて受信した信号から目標を検出する場合に、SN比が低い条件の下であっても、早期に目標を検出することを目的とする。
【解決手段】目標検出装置は、レーダセンサが行った複数回のスキャン処理の各スキャン処理で得た信号の積分路を探索して目標を検出する。特に、各スキャンで得た信号から生成されたディジタルビデオ信号を所定の数の分解能セルを有するブロックに分割して、ブロック間で積分路の探索を行うとともに、ブロックに目標が含まれる可能性を示す評価値に基づき目標を検出する。
(もっと読む)
多目標追尾装置
【課題】可能性のあるものだけに絞って相関処理を行う多目標追尾装置を得る。
【解決手段】レーダー2によって得られた目標物の観測データと、前記観測データに基づき算出された前記目標物の航跡との相関を取りながら前記目標物の追尾を行う多目標追尾装置において、クラスタに属する航跡のゲートの全てが含まれる部分領域をクラスタ毎に作成する領域分割・統合部42と、前記部分領域に存在する観測データと前記航跡との相関処理をクラスタ毎に行う相関処理部43とを設けた。
(もっと読む)
レーダ統制システム
【課題】 目標物の事前情報とレーダ装置の性能や設置場所を基に、複数のレーダ装置の割当を設定するレーダ制御パラメータの最適値候補を算出するレーダ統制システムを提供すること。
【解決手段】 状況入力手段により入力されたレーダ制御傾向、目標状況、電波環境状況、レーダ配備状況の組合せに応じた複数のレーダ装置の目標に対する割当スケジュールを算出する際に用いる、最適な複数の各制御パラメータを算出する算出手段と、状況入力手段により入力されたレーダ制御傾向、目標状況、電波環境状況、レーダ配備状況と算出手段により得られる複数のレーダ装置のスケジュールを算出する際に用いる各制御パラメータと各制御パラメータを用いた場合の結果評価値とを記憶する記憶手段と、算出手段により算出された各制御パラメータより得られる評価結果を解析し、その評価結果から最適な制御パラメータの組合せを少なくとも一つ算出する解析手段とを備える。
(もっと読む)
航跡割当装置
【課題】組合せ最適化問題を解くメタヒューリスティックス手法を用いて航跡割当問題の一つであるMFA問題の解を高速に求める航跡割当装置を提供する。
【解決手段】測定して蓄積された移動体の航跡に関する観測データに基づき、予め定められた制約条件に違反しない複数の航跡候補を割当パターン群として生成し、この生成された割当パターン群を構成する各割当パターンに対し、航跡の始点に基づくグループに分類し、各グループの各割当パターンに対して一意の番号を付与する航跡候補群生成手段3,4と、各割当パターンに付与された番号に基づき、組合せ最適化を図るメタヒューリスティックス手法によって観測値を航跡に割り当てる航跡割当処理を行う航跡割当処理手段5〜10とを有することを特徴とする航跡割当装置にある。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段で今回検出された各検出点をグルーピングするグルーピング手段3と、前回のグループに基づいてグルーピング手段3で今回グルーピングされた複数のグループを統合する統合手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段2で今回検出された検出点をグルーピングするグルーピング手段3と、前回の複数のグループに基づいてグルーピング手段3で今回グルーピングされたグループを複数のグループに分割する分割手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
車両の障害物検知装置
【課題】車両の進行方向前上方や前下方に存在する物体が障害物であるか否かを的確に判定する。
【解決手段】ECU5は、RAMに記憶された前回の位置情報のうち今回の検出時に関連付けが行われなかった未検知物体に対し、推定位置を補間してその位置情報を当該未検知物体の前回の位置情報に関連付けて記憶する。ECU5は、予想進路を推定し、各物体にそれぞれ関連付けて記憶された位置情報と推定した予想進路とに基づいて、物体が車両1と衝突する可能性がある障害物であるか否かを判定する。ECU5は、同一の物体に対して実行した補間の回数を計数し、計数した補間回数に基づいて、当該物体に対する補間処理が有効であるか否かを判定する。ECU5は、補間処理が有効ではないと判定した物体を障害物ではないと判定する。
(もっと読む)
車両の障害物検知装置
【課題】車両前方の物体が障害物であるか否かを早期に且つ的確に判定する。
【解決手段】物体検出センサ4は車両1に対する物体の位置情報を検出し、車速センサ2は車速を検出し、回転角速度センサ3はヨーレイトを検出する。ECU5は、車速及びヨーレイトから車両1の予想進路を推定し、ヨーレイトから角加速度を演算し、推定した予想進路からの物体のオフセット量を算出し、演算した角加速度に対応する危険判定範囲を予め記憶された対応関係に基づいて決定し、物体のオフセット量が危険判定範囲に含まれるとき、物体が車両1と衝突する可能性がある障害物であると判定する。危険判定範囲は、車両1に角加速度が発生している場合の方が、角加速度が発生していない場合よりも、車両1の進行方向前方側における角加速度の発生方向にシフトするように設定されている。
(もっと読む)
目標追尾装置及び目標観測システム及び目標追尾方法及びプログラム
【課題】複数の目標が重なって一つの目標として観測されたのち重なった目標が離れて再び複数の目標として観測された場合でも、正しく目標を同定できる相関処理を実現する。
【解決手段】重複判定装置115は、複数の目標が重なって一つの目標として観測されたか否かを判定する。目標間距離算出装置121は、複数の目標が重なる直前に観測された位置の間の距離(重複前距離)を算出する。目標間距離ゲート設定装置131は、重複前距離に基づいて分離判定範囲を設定する。分離判定装置132は、分離判定範囲内に新たな目標が観測された場合に、重なった目標が離れて再び複数の目標として観測されたと判定する。分離妄評移動距離算出装置133は、分離目標移動距離を算出する。分離目標判定装置135は、分離目標移動距離に基づいて重なった目標が離れて観測された複数の目標を同定する。追尾装置150は、分離目標判定装置135が同定した目標を追尾する。
(もっと読む)
信号分離装置
【課題】分離信号の対応付けの正解率を改善することのできる信号分離装置を得る。
【解決手段】複数の源信号が混信した複数の時系列観測信号を受信し、それぞれをある時間長を有するブロックごとに分割するブロック分割部20aと、ブロック分割部20aで分割された複数の観測信号に独立成分分析を適用して分離処理を行うことにより複数の分離信号および混合行列推定値を抽出する独立成分分析部30と、抽出結果に基づいて、現ブロックから抽出された複数の分離信号と、前ブロックから抽出された複数の分離信号との対応付けを行う相関処理部70aと、それぞれの分離信号を連接し、複数の源信号に相当する連接信号を生成する連接処理部40とを備え、ブロック分割部20aは、時系列の観測信号をブロックごとに分割する際に、前後のブロックを時間的に一部重複させて分割する。
(もっと読む)
移動物体検出装置および自律移動物体
【課題】混雑環境下での移動物体の精度よいトラッキングが行える移動物体検出装置および移動ロボットを提供すること。
【解決手段】空間の混雑度を測定してトラッキングに利用するもので、方向成分では、混雑度が低ければレーザレンジセンサの計測値を重視し、混雑度が高くなると画像処理結果を重視したセンサフュージョンを行い、得られた移動物体推定方向に対してレーザレンジセンサの計測結果から距離を求める。
(もっと読む)
不要追尾目標除去装置
【課題】本発明は不要な追尾目標の捕捉を防止する不要追尾目標除去装置を提供する。
【解決手段】レーダ機能に基づき追尾目標を追尾する追尾制御手段30に対し不要な追尾目標を除去する制御を行う不要追尾目標除去装置3Aである。追尾目標の追尾目標距離情報及び追尾目標方位情報と、レーダ設置位置の緯度経度情報に基づき追尾目標の緯度経度を算出する追尾目標位置情報算出手段62と、追尾目標位置情報を基点とする追尾目標周辺領域を生成する追尾目標周辺領域生成手段63と、電子図データを構成する図形構成要素の特徴をもとに、図形構成要素と追尾目標周辺領域との包含関係を判定し、追尾目標周辺領域内に図形構成要素が含まれると判定すると追尾中止命令を出力する包含関係判定制御手段を含む。
(もっと読む)
21 - 40 / 82
[ Back to top ]