
Fターム[5J070BB15]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡の特徴 (317) | 複数目標の追跡 (82)
Fターム[5J070BB15]に分類される特許
61 - 80 / 82
多目標追尾装置

【課題】許容可能な処理時間で、正確な追尾結果を得ることができる多目標追尾装置を得る。
【解決手段】予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部1と、前記観測値選別部1により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けた。
(もっと読む)
目標航跡相関装置及び目標航跡の相関判定方法

【課題】各センサから得られる複数の目標速度がほぼ同一の場合においても誤相関を軽減できるようにした目標航跡相関装置を提供する。
【解決手段】複数のセンサの各々により得られる目標に関する複数の航跡情報が同一の目標に関する情報であるか否かを判定する目標航跡相関装置において、各センサが求めた目標の追尾速度ベクトルのなす角度を算出する目標追尾速度ベクトル差算出器と、前記センサにより得られる航跡情報の誤差を追尾回数毎及びセンサ毎に予め設定しテーブル化した追尾誤差テーブルと、前記航跡情報の誤差に基づいて、前記目標の追尾速度ベクトルのなす角度の相関しきい値を設定するしきい設定器と、前記目標の追尾速度ベクトルのなす角度と、前記相関しきい値とを比較して、前記複数の航跡情報が同一の目標に関する情報であるか否かを判定する航跡相関判定器とを備えるようにした。
(もっと読む)
追尾装置
【課題】航跡転送周期内の探知データについて、その圧縮時間を状況に応じて制御することにより、探知データ圧縮誤差を低減した追尾装置を得ることを目的とする。
【解決手段】本追尾装置は、センサ1から入力された探知データと目標航跡との相関をとる相関手段3と、相関手段3により相関付けされた探知データを入力し、追尾航跡を生成する追尾フィルタ手段4と、目標航跡と追尾航跡とを管理するトラックファイル100と、探知状況に応じて航跡転送周期内で圧縮時間を制御すると共に、相関付けされた探知データを圧縮時間単位で圧縮して航跡情報として転送する探知データ圧縮手段5とを備えている。
(もっと読む)
車載レーダ装置
【課題】精度良く他車の検出を行う「車載レーダ装置」を提供する。
【解決手段】画像監視部2の車種識別部22は、カメラ21で撮影した画像より、追尾中の他車の車両のタイプを識別する。他車識別部3のフィルタ特性制御部33は、識別された車両のタイプに応じたフィルタ特性をフィルタ31に設定する。フィルタ31は、設定されたフィルタ特性に従って、レーダ測位部1で計測された計測値をフィルタリングして、追尾中の他車のものとして許容できる計測値のみを抽出し、物標追尾部32は抽出された計測値を用いて他車の追尾を行う。
(もっと読む)
レーダ装置
【課題】 追尾目標数よりも数の少ない励振機しか備えていないレーダ装置により、時分割を用いずに目標追尾を実施する。
【解決手段】 アンテナ4の開口面を分割するとともに、励振機1内において、中心周波数が等しい2つの送信信号を生成し、一方の送信信号にアップチャープ変調を施し、もう一方の送信信号にダウンチャープ変調を施し、送受切替器2に接続されたアンテナ4の第1の開口部により複数の目標に対して信号の送受信を行うようにし、アップチャープ変調を施した信号を送信したアンテナ4の第1の開口部からの受信機5で受信した信号はダウンチャープ変調を施した信号により復調を行い、ダウンチャープ変調を施した信号を送信したアンテナ4の第2の開口部からの受信機7で受信した信号はアップチャープ変調を施した信号により復調を行うようにした。
(もっと読む)
位置測定方法及び位置測定装置
【目的】 複数の広角レーダ装置を用いて目標物の位置測定する場合において位置測定精度を向上する「位置測定方法及び位置測定装置」を提供することである。
【構成】 複数の広角レーダ装置を用いて目標物の位置を測定する場合、各広角レーダ装置は、目標物を含む複数の物体を分離することが不可能になったとき該広角レーダ装置から出力する位置データにフラグを付加し、位置決定部は、各広角レーダ装置から出力されるいずれの位置データにもフラグが付加されていなければ、各広角レーダ装置から出力される位置データを用いて加重平均により目標物の位置を決定し、いずれかの位置データにフラグが付加されていれば、該位置データを除外して目標物の位置を決定する。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
追尾レーダ装置
【課題】初探知目標の数が増大しても、捜索性能の劣化を防止でき、また、追尾移行時間が長くなることを防止できる追尾レーダ装置を提供する。
【解決手段】指定方向の空間に送信された送信波の反射波を受信する受信機4と、受信機からの受信信号に基づき目標を検出する目標検出部5と、目標検出部で検出された目標を表す目標検出情報に基づいて、目標を追尾するための追尾情報および初めて検出された目標である初探知目標を表す初探知情報を生成して出力する追尾制御部6と、追尾制御部から出力される追尾情報および初探知情報に基づいてビーム制御を行うレーダ制御部7とを備え、レーダ制御部は、追尾制御部から出力される初探知情報によって表される初探知目標が真目標であるかどうかを確認する検定処理として、検定専用の検定ビームによる検定処理または検定と捜索とが兼用される捜索ビームによる検定処理の何れかを選択する検定方式選択器12を備える。
(もっと読む)
センサ信号処理システム
【課題】 信号源数を正しく推定し目標検知性能及び追尾維持性能を向上させる。
【解決手段】 分解可能軌跡予測部108は前回時刻において分解可能であると予測された追尾中の信号源の追尾情報から、信号源数仮説毎に追尾中の信号源が現在時刻において分解可能であるかを判定し、離反信号源判定部109は前回時刻において分解不能であると予測された追尾中の信号源の追尾情報と現在時刻において抽出された観測値から、信号源数仮説毎に追尾中の信号源が離反したか否かを判定し、相関決定部110は分解可能軌跡予測部108及び離反信号源判定部109の判定結果に基づき、追尾中の信号源と現在時刻において抽出された観測値との相関を決定する。
(もっと読む)
イベント捕捉およびフィルタリングシステム
【課題】 関心イベントを決定するために検出されたイベントをフィルタリングするシステムおよび方法を提供する。
【解決手段】 検出されたイベントを識別し、センサデータを評価して各イベントに関連する少なくとも1つの特性を決定し、複数の検出されたイベントとそれらの関連する特性とを報告する。少なくとも1つの関連イベント発生部が、少なくとも1つの関連イベントを生成し少なくとも1つのイベント報告を生成するように動作可能である。所与のイベント報告は、関連イベントに関連する少なくとも1つの特性を提供する。イベントフィルタリングシステムが、少なくとも1つのイベント報告を検出されたイベントと比較することにより、複数の検出されたイベントの中の少なくとも1つの関連イベントを識別する。
(もっと読む)
レーダ装置
方向の観測値の信頼性が低下しやすい、互いに近接する複数の外部目標の位置と速度とを精度よく追尾する。アンテナからの受信信号を信号処理して複数の外部目標の相対距離と相対速度とを算出するとともに、前記アンテナが放射するビームパターンのうち、一部が重なり合う隣接するビームパターンを組み合わせることで前記複数の外部目標の方向を算出し、この方向と前記相対距離と相対速度から前記複数の外部目標の位置観測値と速度観測値とを取得して、これら位置観測値と速度観測値から個別の外部目標毎の位置と速度の平滑値を算出する目標追尾フィルタと、互いに近接する前記複数の外部目標からクラスタを形成し、クラスタ内の外部目標に対して、前記目標追尾フィルタとは異なるゲートを設定し、このゲートによって前記外部目標の観測値との相関処理を行う追尾処理クラスタ内目標追尾フィルタと、を備えた。 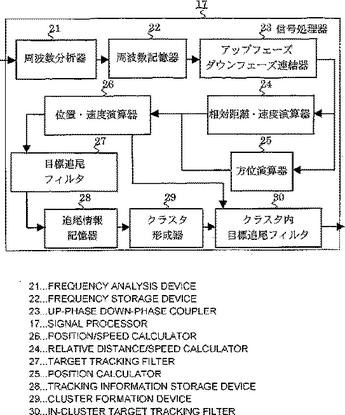 (もっと読む)
(もっと読む)
目標検出装置
【課題】 船舶などの目標が生み出す引き波の影響を排除して真の目標を正確に検出し、真の目標がカメラの撮影範囲から逸脱しないようにカメラを制御することができる目標検出装置を得ることを目的とする。
【解決手段】 クラスタリング処理部6により検出された目標のビデオ領域における進行方向の広がり部分を検出し、その目標のビデオ領域から進行方向の広がり部分を除去する広がり除去部10を設け、その広がり除去部10により広がり部分が除去された目標のビデオ領域の重心位置を計算し、その重心位置に応じてカメラ16を制御する。
(もっと読む)
追尾装置及び目標へのセンサ割り当て方法
【課題】 弾道軌道目標に対する追尾性能を向上させる。
【解決手段】 目標類別・センサ制御処理部80は、RCS算出処理部60からのRCSがついた航跡諸元と統合航跡諸元の中から、RCSのしきい値よりも大きいRCSを持つ航跡諸元と統合航跡諸元を抽出し、抽出したRCSの大きい航跡諸元と統合航跡諸元に関連するレンジ方向及びクロスレンジ方向のセンサ配置情報を用いて、目標の進行方向がレンジ方向のセンサの観測ビームを集中的に割り当てるセンサ制御信号をセンサ群20に出力し、目標の速度ベクトルにより弾頭とブースターを類別し、弾頭に観測ビームを集中的に割り当てるセンサ制御信号をセンサ群20に出力する。
(もっと読む)
目標特定評価装置
【課題】目標のRCSの距離、向きによる変化から、特定結果を判定し、電波データなどでは絞り込めなかった、複数の目標の特定結果を絞り込み、確度の高い特定結果を可能とする目標特定評価装置を得る。
【解決手段】任意のシナリオに基づき複数の疑似的な目標を発生する疑似目標発生部25と、電波探知装置等の覆域を算出する覆域評価部26と、探知した目標の電波目標データ等を作成する目標探知模擬部100と、距離−RCSデータ等と目標特定結果の対応関係を格納するデータベースを作成するデータベース作成部33と、電波目標データ等をデータベースと比較・照合することにより目標を特定する目標特定部39と、特定結果を更新する特定結果評価部40と、特定結果を表示する結果表示部42と、特定結果を統計的に処理する特定結果処理部38と、特定結果の処理結果に基づきデータベースを更新するデータベース更新部43を設けた。
(もっと読む)
追尾モデルの管理
たとえばレーダによって検出された航空機など、遠方の目標の複数の軌跡を同時に維持する方法および装置が開示されている。それぞれの軌跡は、追尾目標についての、考えうる様々な力学的特性を示すモデルプロセスのセットにより、維持される。モデルは、完全にまたは大部分、互いに独立に振る舞うことができる。新たなセンサ情報を用いてモデルを更新するべきか否かは、それぞれの軌跡内のそれぞれのモデルについて、別個に決定される。 (もっと読む)
レーダ装置
【課題】 目標の重要度に応じたビーム分配により探知と追尾を同時に行うことで両者の性能を向上させたレーダ装置を提供する。
【解決手段】 探知された目標の航跡が追尾すべきTBMなどの移動体の航跡に合致する度合いに応じて、追尾に割り当てるビーム数を決定するための重要度を求める重要度算出器8と、重要度に応じて探知と追尾にそれぞれ割り当てるビーム数を算出するビーム分配数算出器10と、ビーム分配数算出器10が算出した分配数に従って探知及び追尾のビーム割り当てを制御するビーム制御部9とを備える。
(もっと読む)
レーダ装置
【課題】 検出処理器における処理溢れを予測して対処措置をとることで、目標の探知情報の精度低下を抑える。
【解決手段】 検出処理器から得られる受信信号に含まれる送信ビームの方向、方向ごとの送信ビームのパルス数及び受信信号の検出処理に要した時間の処理状態を記録する処理状態記録器と、ビームスケジューラで生成された送信及び受信スケジュール上のビームにおける検出処理時間を、当該ビームのパルス数及び記録された処理状態にある過去に同じ送信方向に送信したビームのパルス数とその検出処理時間に基づいて算出し、算出された検出処理時間のビームに処理溢れが予測された場合に、処理溢れが予測された個所の重要度の高いビームを確保して重要度の低いビームを変更するようビームの送信及び受信スケジュールを調整する処理時間調整器とを備える。
(もっと読む)
追尾装置
【課題】偽像を目標とする仮説を排除しながら、効率的に追尾処理を行うことができる追尾装置を得る。
【解決手段】各センサで得られた受信電波から目標に当たり反射した反射電波を抽出する波形抽出部4と、2つのセンサに反射電波が到達する時刻の差によって等距離差双曲面を計算し、別の2つセンサの組み合わせからも等距離差双曲面を計算し、さらに複数の等距離差双曲面の交点であって、目標の位置である測位情報を計算する測位情報計算部5と、前記測位情報に基づいて、目標の運動諸元を推定する追尾フィルタから算出される目標の航跡と、航跡の組合せにより仮説を生成し、追尾処理を実施する多重仮説生成追尾処理部61と、前記多重仮説生成追尾処理部によって生成された仮説中に、偽像を目標と見なす仮説が含まれているか否かを判定し、含まれている場合には前記偽像を目標と見なす仮説を除去する仮説絞込み部62とを設けた。
(もっと読む)
オブジェクトの間隔及び速度測定のための装置
本発明はレーダパルスによるオブジェクトの間隔及び速度を測定するための装置に関し、これにより送信及び受信されるレーダパルスは互いに受信側のミキサ(8)において相関される。レンジゲートを設定するための制御装置(7)において、ミキサ(8)に供給される送信側のレーダパルスはそのパルス遅延に関して連続的に上昇及び/又は下降して変化可能である。切り換え装置はドップラー周波数測定モードに切り換えられるか又は距離測定モードにリセットされる。 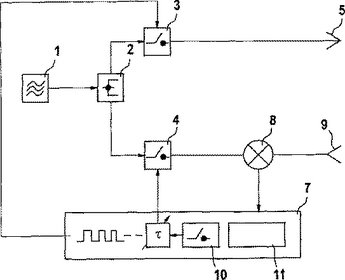 (もっと読む)
(もっと読む)
レーダ装置
【課題】 1つの追随航跡に含まれる目標の機数を正確に判定することができるレーダ装置を得る。
【解決手段】 対象となる目標11に追随しながら指向性をもつ追随ビームを送信し、目標からの反射波を受信して目標の検出、追随、情報管理、類識別及び表示を行うレーダ装置2において、目標を検出するためのレンジビン401内における第1の目標の機数を検出するとともに、追随フィルタの相関ゲート402内でかつレンジビン401外における第2の目標の機数を検出する。前記の第1の目標の機数及び第2の目標の機数を加算して総合機数を判定する。
(もっと読む)
61 - 80 / 82
[ Back to top ]