
Fターム[5J070BB15]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡の特徴 (317) | 複数目標の追跡 (82)
Fターム[5J070BB15]に分類される特許
41 - 60 / 82
レーダ信号処理装置およびレーダ信号処理方法
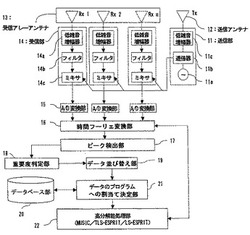
【課題】レーダ装置はできるだけ多くの信号を、できるだけ短時間での処理が要求され、信号の要求精度を落とさずに高精度の高分解能処理の削減で負荷を削減する。
【解決手段】目標物からの反射波をアンテナで受信してA/D変換部でディジタル化し、時間フーリエ変換部でドップラー周波数次元に変換して目標物の相対速度を算出し、ドップラー周波数次元の信号に対しピーク検出部で受信レベルのピーク検出を行い距離ゲートまたは相対速度情報から信号の重要度を重要度判定部で判定して、データ並び替え部で重要度順に並び替え、この各信号と重要度を、異なる複数の高分解能処理方法における演算精度および所定数の信号の処理時間を処理方法との組合せ毎に格納されたデータベースと照合し、各信号と高分解能処理方法とをデータ割当て部で対応させ、高分解能処理部で角度または距離を算出する。
(もっと読む)
目標追尾装置及び目標追尾方法

【課題】ゲートが不必要に拡大するのを防ぎ、高速移動目標に対しても正確にゲート内に目標を捕捉できる目標追尾装置および目標追尾方法を得る。
【解決手段】本発明の追尾装置及び追尾方法は、北基準直交座標での目標運動における加速度ベクトルを駆動雑音とせずに、極座標での速度ベクトルのふらつきを駆動雑音としている。すなわち、平滑値ベクトルから速度ノルムと駆動雑音ベクトルの座標変換行列を算出し、その値と駆動雑音分散の設定値とから駆動雑音共分散行列を算出し、それを用いて追尾処理を行う。これにより、サンプリング間隔が大きい時にも、ゲートの極端な拡大を防ぐとともに、1サンプリング前の目標の速度成分を引用するゲート設定により、目標速度の大小に合わせた駆動雑音を設定し、目標速度に応じてゲートの広さを変化させ、最適なゲート設定を行うことが可能となる。
(もっと読む)
目標追尾装置、目標追尾方法、目標追尾プログラム
【課題】同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化を低減するとともに、航跡の高精度化を目的とする。
【解決手段】追尾処理部108は、観測精度を示す観測精度パラメータが設定された観測モデルを用いて、検出装置200から取得した検出情報に基づき目標の追尾を行う。クラスタリング算出部104は、検出装置200から取得した検出情報が示す目標と認められる位置の集合を示すプロット集合を算出する。サイズ算出部110は、プロット集合の大きさであるプロット集合サイズを算出する。パラメータ制御部112は、プロット集合サイズの大きさに基づき、追尾処理部108が用いる観測モデルに設定された観測精度パラメータが示す観測精度を制御する。
(もっと読む)
目標追尾装置、目標追尾プログラム及び目標追尾方法
【課題】高分解能センサにより同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化の低減を図るとともに、目標の航跡の高精度化を目的とする。
【解決手段】検出情報決定部120は、複数の検出装置から取得した検出情報の内、1つの検出装置から取得した検出情報に基づき目標の追尾を行うか、あるいは2つ以上の検出装置から取得した検出情報に基づき目標の追尾を行うかを所定の条件に基づき選択する。また、検出情報決定部120は、選択した結果に基づき、目標の追尾に使用する検出情報を決定する。追尾処理部140は、決定された検出情報に基づき目標を追尾する。
(もっと読む)
ロケット追尾レーダ装置
【課題】ロケットから分離した小物体や爆破によるロケットの破片を探知、追尾し、落下範囲を予測可能にする。
【解決手段】分離・爆破判定部がロケットの分離、爆破の状態を表す信号を基に分離、爆破を判定し、閾値制御部が破片データベースの対象の破片情報に基づいて推測したサイズの破片を目標として検出するように目標検出部の検出閾値を変更し、追尾制御部が対象の破片情報に基づいて破片のまとまりを目標として一つの追尾ビームにより追尾できるように追尾部の追尾フィルタの変更し、追尾部は対象の破片情報に基づいて追尾フィルタを変更して追尾処理を行うと共に、破片のまとまりに対する追尾ビームを形成するよう送受信装置を制御し、落下範囲予測部は破片のまとまりに対応した追尾結果データおよび対象の破片情報に基づいて破片の予測落下範囲を算出する。
(もっと読む)
目標相関統合処理装置
【課題】 指揮統制するシステムにて、目標相関を統合処理する際、その処理対象は各情報源から収集した目標情報に対し、全目標の組合せとなる。従って、目標の増加による組合せ数の増大は複雑な計算を要する目標相関統合処理の処理負荷に影響を与えていた。
【解決手段】 指揮統制システムに接続し、指揮統制対象となる目標の情報源から目標情報を収集し、蓄積する目標情報収集器、目標情報収集器によって蓄積された目標情報より各目標情報を取得し、分布情報を生成する目標分布生成器、目標分布生成器によって生成された分布情報を取得し、その情報から各目標の速度相関判定器の対象目標組となる組合せを決定する目標組合せ抽出器、目標組合せ抽出器によって抽出された目標の組合せに対して、速度相関判定を実施する速度相関判定器により、総合的に相関の有無を判定する目標相関統合判定処理器の対象となる目標組合せを絞り込み、処理負荷を軽減する。
(もっと読む)
多目標追尾装置
【課題】センサから得られる属性情報を利用しつつ、その属性の急変が起きた場合でも正しい相関決定を行うことができる多目標追尾装置を得る。
【解決手段】入力された最新観測時刻における観測値と各航跡のゲート内外判定を属性に関して行う属性相関決定部1と、各航跡の位置情報に関するゲートを算出し、入力された観測値の位置情報が前記ゲート内にあるかどうかを調べ、入力された観測値がどの航跡と相関可能であるかを決定する位置情報相関決定部2と、観測値と航跡の属性、位置情報に関する相関結果を元に、最新観測時刻の目標の運動諸元を推定する航跡を生成する統合航跡生成部3と、生成された航跡を組合せて仮説を生成し、属性の急激な変動が起きる確率である属性変動確率パラメータを用いて各仮説の信頼度を計算する統合相関仮説生成部4と、計算された信頼度の低い仮説の削除し、似た仮説の統合によって仮説群を縮小する仮説選択統合部5とを設けた。
(もっと読む)
レーダ装置
【課題】MTI処理による追尾目標の探知においてブラインド速度領域にある探知困難な移動目標が存在した場合にも、初探知を含め探知・追尾を容易に行えるようにする。
【解決手段】目標の探知を探索走査時にはビデオ積分処理系行い、また追尾走査時にはMTI処理系で行うようにし、処理系のビデオ信号にプロット生成処理、目標の予想位置、速度の算出を行い、目標情報作成・管理部により、速度が閾値を超えた目標を追尾の対象目標として抽出して目標情報を作成すると共に、ブラインド速度領域に入る速度を持つ対象目標を抽出し、追尾PRF算出部により当該対象目標の速度のドップラ周波数を算出し、当該ドップラ周波数の1/2程度の値を追尾ビームの送信PRFとして算出して励振受信部に与える。
(もっと読む)
追尾装置
【課題】観測の初期段階から、観測誤差の少ない速度情報や加速度情報を得て、安定した目標機及び妨害機の追尾を行うことができる追尾装置を提供する。
【解決手段】入力された観測値に基づいて目標機及び妨害機の追尾処理を行う追尾装置であって、観測値が目標機と妨害機とのいずれに関する観測値であるかを判別する選択部21と、目標機が到達すると予測される位置を示す予測値と観測値とに基づき平滑値を算出して相関のある目標機に対する航跡情報を生成するフィルタリング処理部24aと、目標機の相関を判断する相関処理部25と、相関のある妨害機に対する航跡情報を生成するフィルタリング処理部24bと、妨害機の相関を判断する相関処理部22bと、相関のある目標機の航跡情報を観測値に対する妨害機の航跡情報の初期値に設定する初期化処理部25とを備える。
(もっと読む)
電子走査式精測レーダ装置および目標追尾方法
【課題】追尾目標の予測位置の算出精度を向上させ、かつ、信頼性が高い電子走査式精測レーダ装置を提供する。
【解決手段】捜索周期内の更新レートを擬似的に2倍に上昇させることによって、1つの目標に対して当該目標の位置および速度を検出するための追尾1−1と追尾1−2との2つの追尾を割り当てて、追尾1−1と前記追尾1−2とにより検出された当該目標の最新の位置および速度に基づいて、次走査時の予測位置を算出する。また、追尾1−1と追尾1−2との2つの追尾のうち、いずれかの追尾にコーストが発生した場合、もう一方の追尾に基づいて予測位置を算出する。追尾の対象とする目標として、最終着陸進入時の目標をレーダ表示部により選択指定することにより、当該目標の予測位置の算出を距離のみとし、高低角をグライドパス(GP)上、方位角をコースライン(CL)上に固定して、予測位置の算出を行う処理に切り替える機能を有する。
(もっと読む)
センサ移動計画システム
【課題】全ターゲットについて総合的に誤差を小さくするのに適した移動方向を算出できるセンサ移動計画システムを得る。
【解決手段】センサ管理部2は、ターゲットからの信号を受信したセンサから受信波形を獲得する受信波形獲得機能25と、受信波形の観測時刻におけるセンサの位置を獲得する位置情報獲得機能24と、2つのセンサの受信波形を照合してセンサペアのターゲットまでの距離差及び相対速度差を求める受信波照合機能26と、前記距離差及び相対速度差を満たす、ターゲットの観測位置及び観測速度を算出する整合算出機能27とを有し、ターゲット管理部1は、ターゲットの観測位置及び観測速度から将来の時刻におけるターゲットの推定位置及び推定速度を算出する推定機能13を有し、センサ行動算出部3は、各センサについて、位置及び速度誤差改善ベクトルを総合した誤差改善ベクトルを算出し、次の時刻におけるセンサの位置を決定する改善方向決定機能31とを有する。
(もっと読む)
電子走査レーダのビーム制御装置
【課題】複数のアンテナを装備し、同時に複数のアンテナ面で捜索および多目標追尾を行う電子走査レーダにおいて、アンテナ面間の電波干渉を回避するために設定する送信ディレイ時間により、ビーム切換タイミングで発生する無駄時間を極小化すること。
【解決手段】同一目標に対するビーム照射時間を、電子走査アンテナ毎に決定された送信パルス幅、パルス繰り返し周波数(PRI)、送信パルス幅の送信パルスを受信するための受信時間、同一目標を追尾するために必要な所要ヒット数および、これらを元に算出された、電子走査アンテナ間で電波干渉を回避可能なPRI、送信ディレイ時間、ビーム切換タイミングを揃えるための加算時間に基づいて決定する。
(もっと読む)
センサシステム
【課題】センサのリソースを管理し、複数のセンサを用いて、目標群を効率的に観測するセンサシステムを得る。
【解決手段】センサ1は、検出部4により目標を検出したとき、目標の観測値と関連するセンサ及びリソースの情報を中央情報処理装置2に通知し、中央情報処理装置2は、検出された目標に関する情報を処理し、目標の中央航跡を生成するとともに、生成された中央航跡に関連するセンサ及びリソースの情報をセンサリソース管理部10により管理し、指示器9により中央航跡に対する指示があったときは、センサリソース管理部10により、中央航跡に関連するセンサ及びリソースに対する指示として、該当センサ1のビーム制御部7に通知し、ビーム制御部7によって送受信部3に対してリソースの電波の照射方向を指示するようにした。
(もっと読む)
多目標追尾装置
【課題】従来の多目標追尾装置は、レーダから得た目標の位置情報のみに基づいて目標航跡の相関仮説を生成して行うために、複数の目標の航跡が接近する等複雑な航跡を有する場合には、誤った相関結果を導く可能性が高く、誤追尾が生じやすいという課題があった。本発明は、より信頼度が高い目標追尾が可能な多目標追尾装置を得ることを目的とする。
【解決手段】仮説照合部18は、位置情報追尾処理部4が目標の位置情報から生成した目標航跡を含む仮説群と、目標識別追尾処理部13が目標の位置情報と目標の識別情報から生成した角度航跡との類似度を計算することにより、前記仮説群に含まれる仮説の取捨選択を行う。これにより、誤った相関結果を導く可能性を低くし、より信頼度が高く、正確な相関決定ができる。
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法
【課題】PCLアプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法が開示される。
【解決手段】入力信号を受信、上記入力信号のチャネル歪みを補償後復調し、複素数値表現を形成、上記復調した入力信号から基準信号および目標物信号を推定し、上記基準信号の一部を減らすことであって、上記基準信号は、適応的にフィルタリングされ、出力目標物信号が形成され、上記基準信号の一部を減らすこと、上記出力目標物信号、基準信号に対して逆変換オペレーションを実施、上記出力目標物信号について、複数の目標物ビームを形成、ビームのそれぞれについて、間引きした複数のラグ積を形成、上記基準信号について、間引きした複数のラグ積を形成、ビームのそれぞれについてクロスアンビギュイティ関数を推定、上記基準信号についての上記間引きした複数のラグ積を用いて、上記基準信号についてオートアンビギュイティ関数を推定することを含む。
(もっと読む)
物体検知装置
【課題】 物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理の許可回数を適切に設定する。
【解決手段】 同一性判定手段M3は今回の検知時における予測された相対関係と算出された相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定し、制御対象物体認識手段M4は同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。その際に、外挿手段M5は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段M2により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行うとともに、同一性判定手段M3により同一であると判定された回数に比例して前記外挿回数を増加させるので、実際に物体をロストした場合に外挿が必要以上に継続されてロストした物体を対象とする不適切な制御が行われるのを防止することができる。
(もっと読む)
物体検知装置
【課題】 自車の進行方向の所定の検知領域に存在する制御対象物体を最小限の時間遅れで精度良く判定する。
【解決手段】 前回検知されたターゲットの位置および相対速から今回のターゲットの位置を予測し、その今回予測位置を中心として広い引継ぎエリア、中程度の3回目出力候補判定エリアおよび狭い2回目出力候補判定エリアを設定する。引継ぎエリア内で連続して検知されたターゲットが2回目の検知で2回目出力候補判定エリアに有れば、その時点でそのターゲットを制御対象物体と判定し、引継ぎエリア内で連続して検知されたターゲットが2回目および3回目の検知で共に3回目出力候補判定エリアに有れば、その時点でそのターゲットを制御対象物体と判定し、引継ぎエリア内でターゲットが4回連続して検知されれば、その時点でそのターゲットを制御対象物体と判定する。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、座標系制御部6は、観測値用座標変換部に入力される観測値に応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する。
(もっと読む)
目標表示装置及び目標表示方法
【課題】目標対象を効率良く探知することを可能とする。
【解決手段】目標情報データベース12aには、探知目標入力装置により探知された目標対象の目標情報が記憶される。CPU11は探知する目標対象の種類と探知期間とを指定する探知条件にしたがって目標情報データベース12aから目標情報を抽出する。この抽出された目標情報に基づいて、CPU11は目標対象の探知頻度を表す重複度を算出して重複情報データベース12bに記憶する。そして、CPU11は、重複情報データベース12bに記憶された重複度をもとに目標分布を作成し、目標分布を包含する地図情報を地図データ12cから読み出し、目標分布を地図上に重畳したデータを表示出力I/F16から出力する。
(もっと読む)
追尾割当装置
【課題】複数ターゲットの追尾を複数センサに割当てる場合に、高速に最適割当を実現できる追尾割当装置を得る。
【解決手段】ターゲットDB13と、ターゲット想定軌道束を算出するターゲット想定軌道束算出機能11と、監視要求をターゲットDBに記憶させる監視要求記録機能12とを有するターゲット管理部10と、センサDB24と、割当可能数推移DB25と、既割当スケジュールを記憶する既割当スケジュールDB26と、割当可能数推移を算出する割当可能数推移算出機能21と、センサ毎監視可能期間を算出するセンサ毎監視可能期間算出機能22とを有するセンサ管理部20と、追尾精度貢献度DB32と、追尾精度貢献度を算出する追尾精度貢献度算出機能31とを有する誤差算出部30と、追尾精度貢献度の加算結果から最適割当スケジュールを算出する最適割当算出機能41を有する割当算出部40とを備える。
(もっと読む)
41 - 60 / 82
[ Back to top ]