
飛しょう体のレーダ装置
【課題】追跡目標を見失った時や複数の追跡目標が生じた時にも高精度に目標を追跡できる飛しょう体のレーダ装置を提供する。
【解決手段】複数のビームを形成して追跡目標の捜索を行う第1の信号処理部及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部と、を備える。アンテナ制御部60が、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43のうちいずれが信号を処理するかを択一的に切り替え、第3の信号処理部43がMUSIC法を用いて受信信号から複数の追跡目標の方向を推定する。また、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43が並行して追跡目標70の判定と追跡を行う。
【解決手段】複数のビームを形成して追跡目標の捜索を行う第1の信号処理部及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部と、を備える。アンテナ制御部60が、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43のうちいずれが信号を処理するかを択一的に切り替え、第3の信号処理部43がMUSIC法を用いて受信信号から複数の追跡目標の方向を推定する。また、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43が並行して追跡目標70の判定と追跡を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飛しょう体を誘導する誘導装置のレーダ装置に係り、特に複数の追跡目標の方向判定が可能な飛しょう体のレーダ装置に関する。
【背景技術】
【0002】
従来の飛しょう体システムは、追跡目標の捜索を地上のレーダからの情報を用いて行い、追跡目標の追跡を飛しょう体に搭載されたレーダを用いて目標の情報を取得することにより行っている。
【0003】
しかし近時においては、飛しょう体の高性能化がさらに求められている。すなわち、飛しょう体単独による追跡目標の捜索から追跡が求められるほか、目標側からの不要波への対処や複数の目標に対する対処も求められている。このため、高性能であり、かつ小型のレーダ装置の開発が求められてきた。
【0004】
この点に関し、レーダを一つだけ用いてビームの方向を変化させ、MUSIC法により、受信した信号を角度方向について混信分離する技術が提案されている(例えば、特許文献1)。
【0005】
また、初めに全方位のビームを照射してMUSIC法により複数の目標から追跡目標の概略方向を判定し、次いでその方向にむけて単一の又は複数のビームを照射して追跡目標の方向をより高精度に求める技術が提案されている(例えば、特許文献2)。
【特許文献1】特開2005−37354号公報
【特許文献2】特開2000−196328号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1に記載の技術によっては、ビームの方向を変化させ始めてから変化させ終わるまでにタイムラグによる誤差があり、この誤差によって追跡目標の正確な方向が求められないという問題点や、検出・測距の処理にサブアレイの出力を合成する必要があり、専用の高周波回路を組み込むために大型化するという問題点があった。
【0007】
なお、この特許文献1には、アレイアンテナを比較的少ない複数(例えば3以上)の素子数で構成し、各素子で受信された信号に対してMUSIC処理を含めた方位分解能を向上させることも記載されている(段落0005)。しかしこの方法でも小型で十分な方位分解能を得ることができないという問題点があった。
【0008】
また、特許文献2に記載の技術においては、初めにMUSIC法を使用するため、MUSIC法によって追跡目標を検出できない場合は追跡が困難となるというという問題点があった。
【0009】
本発明は上記のような問題点に鑑みてなされたものであり、追跡目標を見失った時や複数の追跡目標が生じた時にも高精度に目標を追跡できる飛しょう体のレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
この目的を達成するために本発明は、送信信号を生成する信号生成部と、アンテナと移相器と信号の送受信を行う送受信器とを有するセンサを複数個矩形に配列したサブアレイを複数個備えるアレイアンテナと、受信信号をサンプリングするA/D変換部と、ディジタルビーム形成処理を行うビーム形成処理部と、複数のビームを形成して追跡目標の捜索を行う第1の信号処理部及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部と、を備える目標検知部と、ビーム形成処理部と移相器と目標検知部の制御を行うアンテナ制御部と、を備えることを特徴とする飛しょう体のレーダ装置を提供する。
【発明の効果】
【0011】
本発明によれば、目標側からの不要波に対しても目標と不要波の識別をすることができ、目標を遠距離からも検出でき、また地上の目標、空中の目標ともに対処が可能な小型のレーダ装置を構成することができるという効果がある。
【発明を実施するための最良の形態】
【0012】
以下、本発明による飛しょう体のレーダ装置の一実施の形態を、図面を用いて詳細に説明する。なお、各図において同一箇所については同一の符号を付すとともに、重複した説明は省略する。
【0013】
(第1の実施形態)
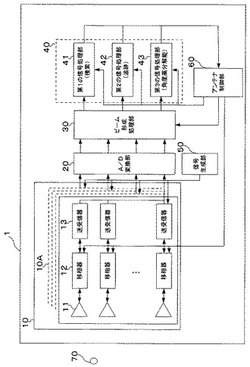
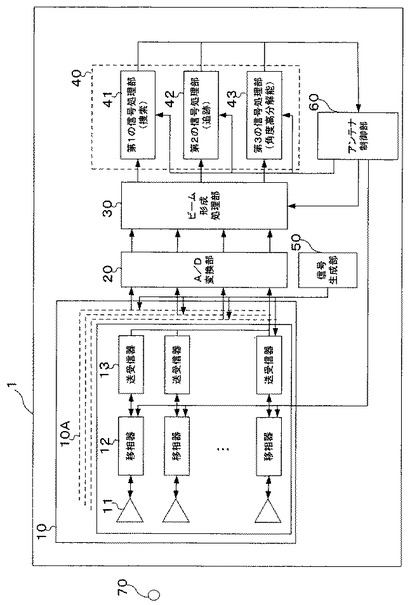
図1は、本実施形態の飛しょう体のレーダ装置1の概要を示すブロック図である。図1に示すように、レーダ装置1は送信信号を生成する信号生成部50と、アレイアンテナ10と、受信信号をサンプリングするA/D変換部20と、ディジタルビーム形成処理を行うビーム形成処理部30と、信号処理を行う目標検知部40と、制御を行うアンテナ制御部60と、を備える。
【0014】
アレイアンテナ10は、アンテナ11と移相器12と信号の送受信を行う送受信器13とを有するセンサを複数個矩形に配列したサブアレイ10Aを複数個備える。また、アンテナ制御部60は、ビーム形成処理部30と移相器12と目標検知部40の制御を行う。
【0015】
目標検知部40は、複数のビームを形成して追跡目標の捜索を行う第1の信号処理部41及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部42及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部43と、を備える。
【0016】
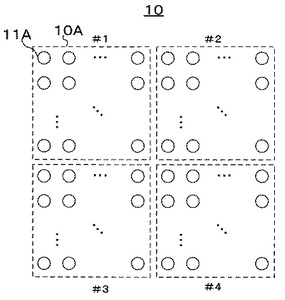
図2は、アレイアンテナ10の配置を示す図である。図2に示すように、アレイアンテナ10は矩形に配置された複数のサブアレイ10Aを有する。サブアレイ10Aは、例えば#1乃至#4に示すように4つ設けることができる。各サブアレイ10Aは複数のセンサ11Aを有する。
【0017】
先ず、ビームの送信について説明する。信号生成部50は送信信号を生成し、各サブアレイ10Aのセンサ11Aに出力する。センサ11Aの送受信器13は入力した信号を増幅し、位相器12に出力する。位相器12はアンテナ制御部60の指示に従って所定の位相差をつけて信号をアンテナ11に出力する。
【0018】
次に、受信信号の処理について説明する。アンテナ11は追跡目標70によって反射された信号を受信する。送受信器13はこの受信された信号を、位相器12を経由して入力し、増幅したのちサブアレイ10AごとにA/D変換部20に出力する。A/D変換部20はアナログ信号をサンプリングしてディジタル信号をビーム形成処理部30に出力する。
【0019】
アンテナ制御部60は、目標検知部40から入力した信号から、追跡目標70を判定し、ビーム形成処理部30と目標検知部40とを制御する。たとえば、アンテナ制御部60は、反射信号が一つであるときは、その反射信号が追跡目標であると判定し、追跡モードの指示をビーム形成処理部30と目標検知部40とに行う。
【0020】
アンテナ制御部60は、反射信号がなくなった場合は追跡目標70を見失ったと判定し、捜索モードの指示をビーム形成処理部30と目標検知部40とに行う。アンテナ制御部60は、反射信号が所定の閾値を下回った場合、又は反射信号に混信が生じている場合、追跡目標70が複数存在すると判定し、高度分解機能モードの指示をビーム形成処理部30と目標検知部40とに行う。
【0021】
次に、ビーム形成処理部30と目標検知部40との処理について説明する。アンテナ制御部60は、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43のうちいずれが信号を処理するかを択一的に切り替える。
【0022】
アンテナ制御部60が捜索モードを指示したとき、目標検知部40は第1の信号処理部41が信号を処理するように切り替える。
【0023】
サブアレイ10Aからの出力信号が4系統であるとすると、A/D変換部20からの出力信号は以下のように表せる。
【0024】
a1=[a11,a12,・・・a1t]
a2=[a21,a22,・・・a2t]
a3=[a31,a32,・・・a3t]
a4=[a41,a42,・・・a4t]
ここで、antは時間tにおける位相と振幅の積である。但し、nは整数である。
【0025】
位相φnk=e−jθnkとするとき、ビーム形成処理部30は以下のように複数のビームを形成し、第1の信号処理部に出力する。但し、kは整数である。
【0026】
B1=a1φ11+a2φ21+a3φ31+a4φ41
B2=a1φ12+a2φ22+a3φ32+a4φ42
・・・
Bk=a1φ1k+a2φ2k+a3φ3k+a4φ4k
追跡目標70の数は通常3以下であることが多い。このため、ビームの数は3以下で足りる。また、計算負荷を考慮するとk<4が望ましい。
【0027】
第1の信号処理部41はB1乃至Bkを用いて、モノパルス測角により測角処理を行う。また、第1の信号処理部41はB1乃至Bkを用いて、パルス送信から反射パルス受信までの時間と光速から追跡目標70までの距離を算出し、アンテナ制御部60に出力する。
【0028】
アンテナ制御部60が追跡モードを指示したとき、目標検知部40は第2の信号処理部42が信号を処理するように切り替える。
【0029】
ビーム形成処理部30は、以下のように単一のビームを形成し、第2の信号処理部42に出力する。
【0030】
B=a1+a2+a3+a4
第2の信号処理部42はBを用いて、モノパルス測角により測角処理を行う。また、第2の信号処理部42はBを用いて、パルス送信から反射パルス受信までの時間と光速から追跡目標70までの距離を算出するとともに、受信パルス電力比による測距離を行って追跡目標70までの距離を算出し、アンテナ制御部60に出力する。
【0031】
アンテナ制御部60が角度高分解機能モードを指示したとき、目標検知部40は第3の信号処理部43が信号を処理するように切り替える。
【0032】
ビーム形成処理部30は、A/D変換部20の出力をそのまま第3の信号処理部43に出力する。
【0033】
第3の信号処理部43はMUSIC法により反射波の到来方向を判定し、アンテナ制御部60に出力する。
【0034】
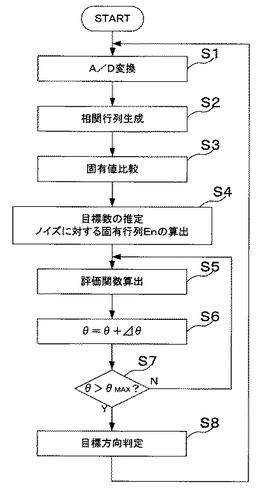
ここで、MUSIC法について説明する。図3はMUSIC法の概要を表すフローチャートである。図3に示すように、ステップS1において、A/D変換部20は受信信号をサンプリングする。
【0035】
ステップS2において、第3の信号処理部43は相関行列Rxxを生成する。
ここで、Rxxは次の(1)式のように定義される。
【0036】
Rxx=E[X(t)XH(t)]=ASAH+σ2I ・・・(1)
ただし、X(t)は時間tにおける受信信号、Aは方向行列である。
また、N(t)をノイズとし、X(t)=As(t)+N(t)とするとき、
S=E[s(t)sH(t)]、σ2は熱雑音電力である。
【0037】
ステップS3において、第3の信号処理部43は相関行列Rxxの固有値λと固有ベクトルを算出する。さらに、第3の信号処理部43は相関行列Rxxの固有値λの大小を比較する。
【0038】
ステップS4において、第3の信号処理部43は固有値λから、例えばMDL(Minimam Description Length)法などにより、追跡目標の数を推定し、ノイズに対する固有行列Enを算出する。
【0039】
ステップS5において、第3の信号処理部43はθを初期化して評価関数を算出する。
ここで、評価関数P(θ)は次の(2)式のように定義される。
【数1】

ただし、v(θ)はステアリングベクトル、E’nはノイズに対する固有行列である。
【0040】
ステップS6において、第3の信号処理部43はθを最小値θminから最大値θmaxまで変化させる。ステップS7において、第3の信号処理部43はθがθmaxを超えたか判定する。超えていない場合は、ステップS5に戻り、超えた場合はステップ8に進む。
【0041】
ステップS8において、第3の信号処理部43は評価関数P(θ)のピークをもたらすθを追跡目標の方向と判定して出力し、ステップS1に戻る。
【0042】
以上のように、第3の信号処理部43はステアリングベクトルを用いて定義された評価関数P(θ)をθについてサーチすることにより、追跡目標からの信号の到来方向を推定する。
【0043】
以上述べたように、本実施形態の飛しょう体のレーダ装置1は、アンテナ制御部60が、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43のうちいずれが信号を処理するかを択一的に切り替え、第3の信号処理部43がMUSIC法を用いて受信信号から複数の追跡目標の方向を推定する。
【0044】
このため、本実施形態の飛しょう体のレーダ装置1は、捜索時は広範囲を短時間で目標を探すことができ、追跡時は捜索にて検出した目標を高精度で観測し、追跡することができ、角度高分解能時は目標が複数存在する場合でもそれらを弁別し、目標側からの不要波に対しても目標と不要波の識別をすることができるという効果がある。
【0045】
またこれにより、目標を遠距離からも検出でき、また地上の目標、空中の目標ともに対処が可能な小型の装置を構成することができるという効果がある。
【0046】
(第2の実施形態)
本実施形態においては、目標検知部40は第1の信号処理部41と第2の信号処理部42と第3の信号処理部43とに並行して信号処理をさせる。
【0047】
装置構成及びビームの送信に関しては第1の実施形態と同様である。
【0048】
次に、受信信号の処理について説明する。アンテナ11は追跡目標70によって反射された信号を受信する。送受信器13はこの受信された信号を、位相器12を経由して入力し、増幅したのちサブアレイ10AごとにA/D変換部20に出力する。A/D変換部20はアナログ信号をサンプリングしてディジタル信号を出力する。
【0049】
次に、ビーム形成処理部30と目標検知部40との処理について説明する。
【0050】
第1の信号処理部41は複数のビームを形成して追跡目標の捜索を行う。サブアレイ10Aからの出力信号が4系統であるとすると、A/D変換部20からの出力信号は以下のように表せる。
【0051】
a1=[a11,a12,・・・a1t]
a2=[a21,a22,・・・a2t]
a3=[a31,a32,・・・a3t]
a4=[a41,a42,・・・a4t]
ここで、antは時間tにおける位相と振幅の積である。但し、nは整数である。
【0052】
位相φnk=e−jθnkとするとき、ビーム形成処理部30は以下のように複数のビームを形成し、第1の信号処理部に出力する。但し、kは整数である。
【0053】
B1=a1φ11+a2φ21+a3φ31+a4φ41
B2=a1φ12+a2φ22+a3φ32+a4φ42
・・・
Bk=a1φ1k+a2φ2k+a3φ3k+a4φ4k
本実施形態においては、計算負荷を考慮するとk<4が望ましい。
【0054】
第1の信号処理部41はB1乃至Bkを用いて、モノパルス測角により測角処理を行う。また、第1の信号処理部41はB1乃至Bkを用いて、パルス送信から反射パルス受信までの時間と光速から追跡目標70までの距離を算出し、アンテナ制御部60に出力する。
【0055】
第2の信号処理部42は単一のビームを形成して追跡目標の追跡を行う。ビーム形成処理部30は、以下のように単一のビームを形成し、第2の信号処理部42に出力する。
B=a1+a2+a3+a4
【0056】
第2の信号処理部42はBを用いて、モノパルス測角により測角処理を行う。また、第2の信号処理部42はBを用いて、パルス送信から反射パルス受信までの時間と光速から追跡目標70までの距離を算出するとともに、受信パルス電力比による測距離を行って追跡目標70までの距離を算出し、アンテナ制御部60に出力する。
【0057】
第3の信号処理部43は受信信号から複数の追跡目標の方向を推定する。ビーム形成処理部30は、A/D変換部20の出力をそのまま第3の信号処理部43に出力する。
【0058】
第3の信号処理部43はMUSIC法により反射波の到来方向を判定し、アンテナ制御部60に出力する。
【0059】
アンテナ制御部60は、第1の信号処理部41と第2の信号処理部42と第3の信号処理部43とのそれぞれの出力を監視し、追跡目標70の追跡を行う。例えば、第2の信号処理部42の出力からでは追跡目標70を検知できなくなった場合には、アンテナ制御部60は第1の信号処理部41の出力から判定した目標と第3の信号処理部43の出力から判定した目標のうち、共通する目標を追跡目標70と判定する。
【0060】
目標検知部40は第1の信号処理部41と第2の信号処理部42と第3の信号処理部43とに並行して信号処理をさせるため、切り替えの際のタイムラグが生じず、高精度の追跡が可能となる。
【0061】
以上述べたように、本実施形態の飛しょう体のレーダ装置1は、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43が並行して追跡目標70の判定と追跡を行う。このため、アンテナ制御部60が追跡目標70を見失うことを最小限にすることが可能となり、高精度な追跡が可能となるという効果がある。
【0062】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【図面の簡単な説明】
【0063】
【図1】本発明の飛しょう体のレーダ装置1の概要を示すブロック図である。
【図2】アレイアンテナ10の配置を示す図である。
【図3】MUSIC法の概要を表すフローチャートである。
【符号の説明】
【0064】
10:アレイアンテナ、
11:アンテナ、
12:移相器、
13:送受信器、
20:A/D変換部、
30:ビーム形成処理部、
40:目標検知部、
41:第1の信号処理部、
42:第2の信号処理部、
43:第3の信号処理部、
50:信号生成部、
60:アンテナ制御部。
【技術分野】
【0001】
本発明は、飛しょう体を誘導する誘導装置のレーダ装置に係り、特に複数の追跡目標の方向判定が可能な飛しょう体のレーダ装置に関する。
【背景技術】
【0002】
従来の飛しょう体システムは、追跡目標の捜索を地上のレーダからの情報を用いて行い、追跡目標の追跡を飛しょう体に搭載されたレーダを用いて目標の情報を取得することにより行っている。
【0003】
しかし近時においては、飛しょう体の高性能化がさらに求められている。すなわち、飛しょう体単独による追跡目標の捜索から追跡が求められるほか、目標側からの不要波への対処や複数の目標に対する対処も求められている。このため、高性能であり、かつ小型のレーダ装置の開発が求められてきた。
【0004】
この点に関し、レーダを一つだけ用いてビームの方向を変化させ、MUSIC法により、受信した信号を角度方向について混信分離する技術が提案されている(例えば、特許文献1)。
【0005】
また、初めに全方位のビームを照射してMUSIC法により複数の目標から追跡目標の概略方向を判定し、次いでその方向にむけて単一の又は複数のビームを照射して追跡目標の方向をより高精度に求める技術が提案されている(例えば、特許文献2)。
【特許文献1】特開2005−37354号公報
【特許文献2】特開2000−196328号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1に記載の技術によっては、ビームの方向を変化させ始めてから変化させ終わるまでにタイムラグによる誤差があり、この誤差によって追跡目標の正確な方向が求められないという問題点や、検出・測距の処理にサブアレイの出力を合成する必要があり、専用の高周波回路を組み込むために大型化するという問題点があった。
【0007】
なお、この特許文献1には、アレイアンテナを比較的少ない複数(例えば3以上)の素子数で構成し、各素子で受信された信号に対してMUSIC処理を含めた方位分解能を向上させることも記載されている(段落0005)。しかしこの方法でも小型で十分な方位分解能を得ることができないという問題点があった。
【0008】
また、特許文献2に記載の技術においては、初めにMUSIC法を使用するため、MUSIC法によって追跡目標を検出できない場合は追跡が困難となるというという問題点があった。
【0009】
本発明は上記のような問題点に鑑みてなされたものであり、追跡目標を見失った時や複数の追跡目標が生じた時にも高精度に目標を追跡できる飛しょう体のレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
この目的を達成するために本発明は、送信信号を生成する信号生成部と、アンテナと移相器と信号の送受信を行う送受信器とを有するセンサを複数個矩形に配列したサブアレイを複数個備えるアレイアンテナと、受信信号をサンプリングするA/D変換部と、ディジタルビーム形成処理を行うビーム形成処理部と、複数のビームを形成して追跡目標の捜索を行う第1の信号処理部及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部と、を備える目標検知部と、ビーム形成処理部と移相器と目標検知部の制御を行うアンテナ制御部と、を備えることを特徴とする飛しょう体のレーダ装置を提供する。
【発明の効果】
【0011】
本発明によれば、目標側からの不要波に対しても目標と不要波の識別をすることができ、目標を遠距離からも検出でき、また地上の目標、空中の目標ともに対処が可能な小型のレーダ装置を構成することができるという効果がある。
【発明を実施するための最良の形態】
【0012】
以下、本発明による飛しょう体のレーダ装置の一実施の形態を、図面を用いて詳細に説明する。なお、各図において同一箇所については同一の符号を付すとともに、重複した説明は省略する。
【0013】
(第1の実施形態)
図1は、本実施形態の飛しょう体のレーダ装置1の概要を示すブロック図である。図1に示すように、レーダ装置1は送信信号を生成する信号生成部50と、アレイアンテナ10と、受信信号をサンプリングするA/D変換部20と、ディジタルビーム形成処理を行うビーム形成処理部30と、信号処理を行う目標検知部40と、制御を行うアンテナ制御部60と、を備える。
【0014】
アレイアンテナ10は、アンテナ11と移相器12と信号の送受信を行う送受信器13とを有するセンサを複数個矩形に配列したサブアレイ10Aを複数個備える。また、アンテナ制御部60は、ビーム形成処理部30と移相器12と目標検知部40の制御を行う。
【0015】
目標検知部40は、複数のビームを形成して追跡目標の捜索を行う第1の信号処理部41及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部42及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部43と、を備える。
【0016】
図2は、アレイアンテナ10の配置を示す図である。図2に示すように、アレイアンテナ10は矩形に配置された複数のサブアレイ10Aを有する。サブアレイ10Aは、例えば#1乃至#4に示すように4つ設けることができる。各サブアレイ10Aは複数のセンサ11Aを有する。
【0017】
先ず、ビームの送信について説明する。信号生成部50は送信信号を生成し、各サブアレイ10Aのセンサ11Aに出力する。センサ11Aの送受信器13は入力した信号を増幅し、位相器12に出力する。位相器12はアンテナ制御部60の指示に従って所定の位相差をつけて信号をアンテナ11に出力する。
【0018】
次に、受信信号の処理について説明する。アンテナ11は追跡目標70によって反射された信号を受信する。送受信器13はこの受信された信号を、位相器12を経由して入力し、増幅したのちサブアレイ10AごとにA/D変換部20に出力する。A/D変換部20はアナログ信号をサンプリングしてディジタル信号をビーム形成処理部30に出力する。
【0019】
アンテナ制御部60は、目標検知部40から入力した信号から、追跡目標70を判定し、ビーム形成処理部30と目標検知部40とを制御する。たとえば、アンテナ制御部60は、反射信号が一つであるときは、その反射信号が追跡目標であると判定し、追跡モードの指示をビーム形成処理部30と目標検知部40とに行う。
【0020】
アンテナ制御部60は、反射信号がなくなった場合は追跡目標70を見失ったと判定し、捜索モードの指示をビーム形成処理部30と目標検知部40とに行う。アンテナ制御部60は、反射信号が所定の閾値を下回った場合、又は反射信号に混信が生じている場合、追跡目標70が複数存在すると判定し、高度分解機能モードの指示をビーム形成処理部30と目標検知部40とに行う。
【0021】
次に、ビーム形成処理部30と目標検知部40との処理について説明する。アンテナ制御部60は、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43のうちいずれが信号を処理するかを択一的に切り替える。
【0022】
アンテナ制御部60が捜索モードを指示したとき、目標検知部40は第1の信号処理部41が信号を処理するように切り替える。
【0023】
サブアレイ10Aからの出力信号が4系統であるとすると、A/D変換部20からの出力信号は以下のように表せる。
【0024】
a1=[a11,a12,・・・a1t]
a2=[a21,a22,・・・a2t]
a3=[a31,a32,・・・a3t]
a4=[a41,a42,・・・a4t]
ここで、antは時間tにおける位相と振幅の積である。但し、nは整数である。
【0025】
位相φnk=e−jθnkとするとき、ビーム形成処理部30は以下のように複数のビームを形成し、第1の信号処理部に出力する。但し、kは整数である。
【0026】
B1=a1φ11+a2φ21+a3φ31+a4φ41
B2=a1φ12+a2φ22+a3φ32+a4φ42
・・・
Bk=a1φ1k+a2φ2k+a3φ3k+a4φ4k
追跡目標70の数は通常3以下であることが多い。このため、ビームの数は3以下で足りる。また、計算負荷を考慮するとk<4が望ましい。
【0027】
第1の信号処理部41はB1乃至Bkを用いて、モノパルス測角により測角処理を行う。また、第1の信号処理部41はB1乃至Bkを用いて、パルス送信から反射パルス受信までの時間と光速から追跡目標70までの距離を算出し、アンテナ制御部60に出力する。
【0028】
アンテナ制御部60が追跡モードを指示したとき、目標検知部40は第2の信号処理部42が信号を処理するように切り替える。
【0029】
ビーム形成処理部30は、以下のように単一のビームを形成し、第2の信号処理部42に出力する。
【0030】
B=a1+a2+a3+a4
第2の信号処理部42はBを用いて、モノパルス測角により測角処理を行う。また、第2の信号処理部42はBを用いて、パルス送信から反射パルス受信までの時間と光速から追跡目標70までの距離を算出するとともに、受信パルス電力比による測距離を行って追跡目標70までの距離を算出し、アンテナ制御部60に出力する。
【0031】
アンテナ制御部60が角度高分解機能モードを指示したとき、目標検知部40は第3の信号処理部43が信号を処理するように切り替える。
【0032】
ビーム形成処理部30は、A/D変換部20の出力をそのまま第3の信号処理部43に出力する。
【0033】
第3の信号処理部43はMUSIC法により反射波の到来方向を判定し、アンテナ制御部60に出力する。
【0034】
ここで、MUSIC法について説明する。図3はMUSIC法の概要を表すフローチャートである。図3に示すように、ステップS1において、A/D変換部20は受信信号をサンプリングする。
【0035】
ステップS2において、第3の信号処理部43は相関行列Rxxを生成する。
ここで、Rxxは次の(1)式のように定義される。
【0036】
Rxx=E[X(t)XH(t)]=ASAH+σ2I ・・・(1)
ただし、X(t)は時間tにおける受信信号、Aは方向行列である。
また、N(t)をノイズとし、X(t)=As(t)+N(t)とするとき、
S=E[s(t)sH(t)]、σ2は熱雑音電力である。
【0037】
ステップS3において、第3の信号処理部43は相関行列Rxxの固有値λと固有ベクトルを算出する。さらに、第3の信号処理部43は相関行列Rxxの固有値λの大小を比較する。
【0038】
ステップS4において、第3の信号処理部43は固有値λから、例えばMDL(Minimam Description Length)法などにより、追跡目標の数を推定し、ノイズに対する固有行列Enを算出する。
【0039】
ステップS5において、第3の信号処理部43はθを初期化して評価関数を算出する。
ここで、評価関数P(θ)は次の(2)式のように定義される。
【数1】
ただし、v(θ)はステアリングベクトル、E’nはノイズに対する固有行列である。
【0040】
ステップS6において、第3の信号処理部43はθを最小値θminから最大値θmaxまで変化させる。ステップS7において、第3の信号処理部43はθがθmaxを超えたか判定する。超えていない場合は、ステップS5に戻り、超えた場合はステップ8に進む。
【0041】
ステップS8において、第3の信号処理部43は評価関数P(θ)のピークをもたらすθを追跡目標の方向と判定して出力し、ステップS1に戻る。
【0042】
以上のように、第3の信号処理部43はステアリングベクトルを用いて定義された評価関数P(θ)をθについてサーチすることにより、追跡目標からの信号の到来方向を推定する。
【0043】
以上述べたように、本実施形態の飛しょう体のレーダ装置1は、アンテナ制御部60が、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43のうちいずれが信号を処理するかを択一的に切り替え、第3の信号処理部43がMUSIC法を用いて受信信号から複数の追跡目標の方向を推定する。
【0044】
このため、本実施形態の飛しょう体のレーダ装置1は、捜索時は広範囲を短時間で目標を探すことができ、追跡時は捜索にて検出した目標を高精度で観測し、追跡することができ、角度高分解能時は目標が複数存在する場合でもそれらを弁別し、目標側からの不要波に対しても目標と不要波の識別をすることができるという効果がある。
【0045】
またこれにより、目標を遠距離からも検出でき、また地上の目標、空中の目標ともに対処が可能な小型の装置を構成することができるという効果がある。
【0046】
(第2の実施形態)
本実施形態においては、目標検知部40は第1の信号処理部41と第2の信号処理部42と第3の信号処理部43とに並行して信号処理をさせる。
【0047】
装置構成及びビームの送信に関しては第1の実施形態と同様である。
【0048】
次に、受信信号の処理について説明する。アンテナ11は追跡目標70によって反射された信号を受信する。送受信器13はこの受信された信号を、位相器12を経由して入力し、増幅したのちサブアレイ10AごとにA/D変換部20に出力する。A/D変換部20はアナログ信号をサンプリングしてディジタル信号を出力する。
【0049】
次に、ビーム形成処理部30と目標検知部40との処理について説明する。
【0050】
第1の信号処理部41は複数のビームを形成して追跡目標の捜索を行う。サブアレイ10Aからの出力信号が4系統であるとすると、A/D変換部20からの出力信号は以下のように表せる。
【0051】
a1=[a11,a12,・・・a1t]
a2=[a21,a22,・・・a2t]
a3=[a31,a32,・・・a3t]
a4=[a41,a42,・・・a4t]
ここで、antは時間tにおける位相と振幅の積である。但し、nは整数である。
【0052】
位相φnk=e−jθnkとするとき、ビーム形成処理部30は以下のように複数のビームを形成し、第1の信号処理部に出力する。但し、kは整数である。
【0053】
B1=a1φ11+a2φ21+a3φ31+a4φ41
B2=a1φ12+a2φ22+a3φ32+a4φ42
・・・
Bk=a1φ1k+a2φ2k+a3φ3k+a4φ4k
本実施形態においては、計算負荷を考慮するとk<4が望ましい。
【0054】
第1の信号処理部41はB1乃至Bkを用いて、モノパルス測角により測角処理を行う。また、第1の信号処理部41はB1乃至Bkを用いて、パルス送信から反射パルス受信までの時間と光速から追跡目標70までの距離を算出し、アンテナ制御部60に出力する。
【0055】
第2の信号処理部42は単一のビームを形成して追跡目標の追跡を行う。ビーム形成処理部30は、以下のように単一のビームを形成し、第2の信号処理部42に出力する。
B=a1+a2+a3+a4
【0056】
第2の信号処理部42はBを用いて、モノパルス測角により測角処理を行う。また、第2の信号処理部42はBを用いて、パルス送信から反射パルス受信までの時間と光速から追跡目標70までの距離を算出するとともに、受信パルス電力比による測距離を行って追跡目標70までの距離を算出し、アンテナ制御部60に出力する。
【0057】
第3の信号処理部43は受信信号から複数の追跡目標の方向を推定する。ビーム形成処理部30は、A/D変換部20の出力をそのまま第3の信号処理部43に出力する。
【0058】
第3の信号処理部43はMUSIC法により反射波の到来方向を判定し、アンテナ制御部60に出力する。
【0059】
アンテナ制御部60は、第1の信号処理部41と第2の信号処理部42と第3の信号処理部43とのそれぞれの出力を監視し、追跡目標70の追跡を行う。例えば、第2の信号処理部42の出力からでは追跡目標70を検知できなくなった場合には、アンテナ制御部60は第1の信号処理部41の出力から判定した目標と第3の信号処理部43の出力から判定した目標のうち、共通する目標を追跡目標70と判定する。
【0060】
目標検知部40は第1の信号処理部41と第2の信号処理部42と第3の信号処理部43とに並行して信号処理をさせるため、切り替えの際のタイムラグが生じず、高精度の追跡が可能となる。
【0061】
以上述べたように、本実施形態の飛しょう体のレーダ装置1は、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43が並行して追跡目標70の判定と追跡を行う。このため、アンテナ制御部60が追跡目標70を見失うことを最小限にすることが可能となり、高精度な追跡が可能となるという効果がある。
【0062】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【図面の簡単な説明】
【0063】
【図1】本発明の飛しょう体のレーダ装置1の概要を示すブロック図である。
【図2】アレイアンテナ10の配置を示す図である。
【図3】MUSIC法の概要を表すフローチャートである。
【符号の説明】
【0064】
10:アレイアンテナ、
11:アンテナ、
12:移相器、
13:送受信器、
20:A/D変換部、
30:ビーム形成処理部、
40:目標検知部、
41:第1の信号処理部、
42:第2の信号処理部、
43:第3の信号処理部、
50:信号生成部、
60:アンテナ制御部。
【特許請求の範囲】
【請求項1】
送信信号を生成する信号生成部と、
アンテナと移相器と信号の送受信を行う送受信器とを有するセンサを複数個矩形に配列したサブアレイを複数個備えるアレイアンテナと、
受信信号をサンプリングするA/D変換部と、
ディジタルビーム形成処理を行うビーム形成処理部と、
複数のビームを形成して追跡目標の捜索を行う第1の信号処理部及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部と、を備える目標検知部と、
前記ビーム形成処理部と前記移相器と前記目標検知部の制御を行うアンテナ制御部と、
を備えることを特徴とする飛しょう体のレーダ装置。
【請求項2】
前記アンテナ制御部が、第1の信号処理部及び第2の信号処理部及び第3の信号処理部のうちいずれが信号を処理するかを択一的に切り替えることを特徴とする請求項1記載の飛しょう体のレーダ装置。
【請求項3】
前記第3の信号処理部が、MUSIC法を用いて受信信号から複数の追跡目標の方向を推定することを特徴とする請求項1又は請求項2に記載の飛しょう体のレーダ装置。
【請求項4】
前記目標検知部が、追跡目標を見失ったと判定したとき前記第1の信号処理部に信号処理をさせ、追跡目標を検知したとき前記第2の信号処理部に信号処理させ、追跡目標が複数あると判定したとき前記第3の信号処理部に信号処理させることを特徴とする請求項3記載の飛しょう体のレーダ装置。
【請求項5】
前記目標検知部が、前記第1の信号処理部と前記第2の信号処理部と前記第3の信号処理部とに並行して信号処理をさせることを特徴とする請求項1記載の飛しょう体のレーダ装置。
【請求項1】
送信信号を生成する信号生成部と、
アンテナと移相器と信号の送受信を行う送受信器とを有するセンサを複数個矩形に配列したサブアレイを複数個備えるアレイアンテナと、
受信信号をサンプリングするA/D変換部と、
ディジタルビーム形成処理を行うビーム形成処理部と、
複数のビームを形成して追跡目標の捜索を行う第1の信号処理部及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部と、を備える目標検知部と、
前記ビーム形成処理部と前記移相器と前記目標検知部の制御を行うアンテナ制御部と、
を備えることを特徴とする飛しょう体のレーダ装置。
【請求項2】
前記アンテナ制御部が、第1の信号処理部及び第2の信号処理部及び第3の信号処理部のうちいずれが信号を処理するかを択一的に切り替えることを特徴とする請求項1記載の飛しょう体のレーダ装置。
【請求項3】
前記第3の信号処理部が、MUSIC法を用いて受信信号から複数の追跡目標の方向を推定することを特徴とする請求項1又は請求項2に記載の飛しょう体のレーダ装置。
【請求項4】
前記目標検知部が、追跡目標を見失ったと判定したとき前記第1の信号処理部に信号処理をさせ、追跡目標を検知したとき前記第2の信号処理部に信号処理させ、追跡目標が複数あると判定したとき前記第3の信号処理部に信号処理させることを特徴とする請求項3記載の飛しょう体のレーダ装置。
【請求項5】
前記目標検知部が、前記第1の信号処理部と前記第2の信号処理部と前記第3の信号処理部とに並行して信号処理をさせることを特徴とする請求項1記載の飛しょう体のレーダ装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−281968(P2009−281968A)
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願番号】特願2008−136668(P2008−136668)
【出願日】平成20年5月26日(2008.5.26)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願日】平成20年5月26日(2008.5.26)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]