
Fターム[5J070AH50]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | その他 (49)
Fターム[5J070AH50]に分類される特許
1 - 20 / 49
物標探知方法、物標探知プログラム、物標探知装置、およびレーダ装置
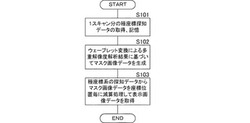
【課題】クラッタを効果的に抑圧することができる物標探知方法を実現する。
【解決手段】まず、1スキャン分の探知データを極座標系で取得し、距離方向と方位方向とを二軸とする二次元座標系で記憶する(S101)。極座標系の二次元座標で記憶された探知データに対して、二次元ウェーブレット変換を複数の解像度で実行する。クラッタの特性に応じて設定された特定の解像度における展開係数分布に基づいて、極座標系からなるマスク画像データの各座標位置のレベルを設定する(S102)。座標位置毎に探知データのレベルからマスク画像データのレベルを減算して、表示画像データを生成する(S103)。
(もっと読む)
イメージング装置及びイメージング方法

【課題】近傍界イメージングにおいて、イメージング像の高分解能化を可能とする。
【解決手段】送信回路12からミリ波を出力させて送受信アンテナ14から放射し、受信回路13により、観測対象物3の表面で反射したミリ波を送受信アンテナ14を介して測定信号として受信し、測定信号のIQ値から反射信号のIQ値を算出するオフセット補正関数の未知数を求めてオフセット補正関数を導出し、測定信号のIQ値からオフセット補正関数で算出した反射信号のIQ値を引いて散乱信号のIQ値を求める。これにより、イメージング像の高分解能化が可能となる。
(もっと読む)
測角装置、モノパルス測角装置、モノパルスレーダ、マルチスタティックレーダ
【課題】装置規模が小さくマルチパス波の干渉下でも所望波の到来角を正確に推定する測角装置を得る。
【解決手段】測角装置は、複数の到来波が混信入射する複数の受信アンテナ、上記受信アンテナそれぞれに接続された受信機を有する測角装置であって、各受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の逆行列または擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定する。
(もっと読む)
レーダ装置、目標同化判定処理方法およびプログラム
【課題】非同期に走査を行う1次レーダおよび2次レーダにおいて捕捉した目標の同化判定処理を容易に行うこと。
【解決手段】1次レーダ10と、この1次レーダ10と走査速度が非同期の2次レーダ11とを備えるレーダ装置1において、1次レーダ10が捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダ10が目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾部12と、2次レーダ11が目標tを捕捉した時刻に対応する航跡追尾部12が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部12が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定部としてのデータ処理部13とを備える。
(もっと読む)
車両用レーダ装置
【課題】車両の状態や車両周囲の環境状態を考慮し、測距性能の向上を図る。
【解決手段】測距部52は、受信波形とシステムが保有する基準波形との差分波形に基づいて測距を行う。その場合、旋回や加減速による車両の姿勢変化に伴ってアンテナ位置が変化したり、雨天時に電波の送受信状態が変化したときには、差分波形補正部53で路面の反射成分を除去して差分波形を補正し、測距部52は、この補正した差分波形を用いて測距を行うことで、測距性能の向上を図る。
(もっと読む)
レーダ装置
【課題】舶や陸などの物標からの信号と雨雪反射信号とを区別して雨雪反射信号が発生している領域を検出することができるレーダ装置を提供することを目的とする。
【解決手段】本発明は雨雪反射信号の受信信号レベルの立ち上がりや立下りが船舶や陸などの物標からの反射信号に比べて緩やかであることに着目し、雨雪領域検出部7が所定方向に連続する受信信号の,受信信号レベルの所定単位あたりの変化量である傾きを算出し、該算出した傾きを用いて受信信号が雨雪反射信号であるかを判定する。
(もっと読む)
車載レーダ装置、及びターゲット認識方法
【課題】対向車からのレーダを直接受信するような強い干渉電波が生じる場合においても、干渉波の影響を最小限に抑えて、正確な測距や測角ができるレーダ装置を提供する。
【解決手段】レーダ装置の送受信部100は、アンテナ素子101と、アンテナ素子101に対する信号の位相又は振幅の少なくとも一方を調整するウエイト調整部102と、加算部103とを備え、制御部104は、アンテナ部におけるレーダの送信又は受信を切り替える送受信制御部104cと、アンテナ部が受信した干渉波を検出する干渉波検出部104aと、干渉波検出部104aにおいて干渉波が検出された場合には、ウエイト調整部102を制御してアンテナ部における指向性のヌル点の方向を調整するヌル方向制御部104bとを備える。
(もっと読む)
レーダ装置
【課題】ドップラー周波数の変化を考慮してドップラー補正を行い、超分解能測距精度の改善を図る。
【解決手段】送信周波数をステップ状に変化させた電波を生成して送信するとともに、当該電波が目標(4)で反射した反射波を受信する送受信手段(1,2,3,5,6)と、送受信手段による受信信号に基づいて、目標(4)の検出情報を目標信号として出力する目標検出処理手段(7,8,9)と、目標検出処理手段からの目標信号が入力されて、送信周波数の違いによるドップラー周波数の変化に基づいて、目標信号の位相を補正したドップラー補正信号を出力するドップラー補正処理手段(10)と、ドップラー補正処理手段からのドップラー補正信号に基づいて、目標(4)までの距離を超分解能測距する超分解能処理手段(11)とを備えている。
(もっと読む)
アンテナ装置,方位検出装置
【課題】二次元的にビーム方向を変化させることが可能であり且つ小型のアンテナ装置及び方位検出装置を提供する。
【解決手段】送信側は第1走査方向に沿って配列された複数の単位アンテナAUからなる送信アンテナ部10に対してロトマンレンズ41を介して給電を行うことにより、第1走査方向に沿った一次元的な走査を行い、受信側は第2走査方向に沿って配列された複数の単位アンテナAUからなる受信アンテナ部20から、単位アンテナAU毎に得られる受信信号(ビート信号)に基づいて、第2走査方向に沿った一次元的な方位検出を行い、これを組み合わせることで二次元的な方位検出を行う。但し、受信ビームの縦幅(第1走査方向に沿った角度範囲)を、送信ビームの走査範囲より広く、送信ビームの横幅(第2走査方向に沿った角度範囲)を、受信ビームの走査範囲より広く設定する。
(もっと読む)
信号処理装置
【課題】センサでの観測データにより未知パラメータを推定する方法に用いる信号数の推定には、従来、経験則による閾値を用いるため、高精度な未知パラメータの推定ができない。
【解決手段】キュムラント行列演算手段で求めた、センサでの観測データの高次統計量に基づくキュムラント行列から、固有値固有ベクトル演算手段が固有値と固有値に対応する固有ベクトルに分解し、符号判定手段が分解された固有値の符号が反転するときまでの固有値数を検出して信号数を推定し、パラメータ推定手段で、符号が反転するときまでの固有値に対応する固有ベクトルを用いて、未知パラメータを推定する。
(もっと読む)
測距システム
【課題】極至近距離の測距を可能にする新規な測距手法を提供する。
【解決手段】判定部3は、パルスレーダ1によって生成された受信波形を時間軸上において複数の区間に分割し、分割された区間のそれぞれにおける受信波形の積分値の大小関係に基づいて、受信波形の位相パターンを判定する。測距部4は、ターゲットの既知の距離において出現する位相パターンを特定するとともに、この位相パターンの繰り返しに基づいて、既知の距離からの変化量を算出し、これによって、ターゲットの現在の距離を算出する。
(もっと読む)
A/D変換器および計測装置
【課題】処理負荷を抑えながら、複数のA/D変換回路を用いることで発生する変換誤差の影響を低減するA/D変換器を提供する。
【解決手段】受光回路20は、A/D変換処理の周期毎に、A/D変換回路のA/D変換開始順序を変更し、各周期でA/D変換されたデジタル信号について同位相のデジタル信号を加算する。例えば、A/D変換切替部22は、1周期目では、A/D変換回路21A、21B、21Cの順にA/D変換を行い、2周期目では、A/D変換回路21B、21C、21Aの順にA/D変換を行う。3周期目では、A/D変換回路21C、21A、21Bの順にA/D変換を行う。
(もっと読む)
先行車両の位置検出方法及び位置検出装置並びにデータフィルタリング方法
【課題】先行車両の位置データの算出精度を向上することができる位置検出方法及び位置検出装置を提供する。
【解決手段】自車両1に対する先行車両2の位置を検出する方法であって、車間距離情報riと横位置情報Li,Riからなる一次データセットを取得する工程と、一次データセットの車間距離情報riに対して線形回帰処理を行い、得られた線形回帰線との差が所定の閾値以下の車間距離情報riとこれに対応する横位置情報Li,Riとからなる二次データセットを取得する線形回帰処理工程と、この二次データセットの横位置情報Li,Riに対してクラスタリング処理を行い、最大のクラスタに含まれる横位置情報Li,Riとこれに対応する車間距離情報riとからなる三次データセットを取得するクラスタリング処理工程と、この三次データセットを用いて現在時刻t0における車間距離と横位置とを算出する位置情報算出工程とを備えた。
(もっと読む)
波数推定装置
【課題】従来の波数推定装置では、目標の固有値と雑音の固有値との差が小さくなる低SNRの場合、誤った波数推定を行う問題があった。
【解決手段】目標からの反射信号を、アンテナのビーム指向方向に高利得を得るようビーム合成して、ビーム合成信号をパルス間積分し、パルス間積分信号から目標信号が検出された場合、目標からの反射信号の相関行列を相関行列算出手段で算出し、固有値・固有ベクトル算出手段で固有値・固有ベクトルを算出し、この固有ベクトルにより固有ビーム形成手段でビーム形成して、ビーム形成出力に対しコヒーレント積分手段がコヒーレント積分を行い、コヒーレント積分値を所定の基準で抽出して、波数推定手段で波数を推定する。
(もっと読む)
非破壊検査装置、非破壊検査システム及び非破壊検査用車両
【課題】目的に応じた解析手法の確立、並びに精度とスピードの両立を図った、実用的な非破壊検査装置を提供する。
【解決手段】検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データDを受け付けるデータ受付手段61と、受け付けた反射波データDと仮説に基づき複数の基本反射波を時間的にずらして一次結合した予測信号波形との間でパターンマッチングを行うことによって当該反射波データDを複数の基本反射波に分離する反射波分離手段62と、反射波分離手段62によって分離した基本反射波のうち特定の検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから検査項目に係る所定の被検値を算出する一又は複数の目的別解析モジュール63と、検査項目の設定・入力等を受け付ける設定入力手段64とを備え、検査項目に関連する基本反射波に基づく被検値Doutの算出を行わせる。
(もっと読む)
飛しょう体のレーダ装置
【課題】追跡目標を見失った時や複数の追跡目標が生じた時にも高精度に目標を追跡できる飛しょう体のレーダ装置を提供する。
【解決手段】複数のビームを形成して追跡目標の捜索を行う第1の信号処理部及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部と、を備える。アンテナ制御部60が、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43のうちいずれが信号を処理するかを択一的に切り替え、第3の信号処理部43がMUSIC法を用いて受信信号から複数の追跡目標の方向を推定する。また、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43が並行して追跡目標70の判定と追跡を行う。
(もっと読む)
チャープ信号発生装置
【課題】 DDSを用いて、低雑音チャープ信号と広帯域チャープ信号とを出力するチャープ信号発生装置を得る。
【解決手段】 DDSから出力されるチャープ信号を分周する分周器と、分周器により分周されたチャープ信号と第二局部発振信号発生器の出力信号を周波数合成するミクサとを有した分周系と、DDSから出力されるチャープ信号を逓倍する逓倍器を有した逓倍系と、経路切換え信号に基づいて分周系の出力信号と逓倍系の出力信号を時系列に順次切換えて出力するスイッチを設けることで、所定のデューティ比で低雑音チャープ信号と広帯域チャープ信号を得る。
(もっと読む)
目標検出装置
【課題】高速目標が小目標であっても目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路1と、CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路2と、CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路3とを備え、2次元DWT回路の出力に基づき目標を検出する。
(もっと読む)
等価時間サンプリングパルスレーダ
【課題】帯域を確保しつつ、効率良く外来ノイズを抑制する。
【解決手段】送信フィルタ12は、送信系1に設けられ、送信パルスをフィルタリングする。受信フィルタ22は、受信系2に設けられ、受信パルスをフィルタリングする。サンプルパルスフィルタ24は、受信系2に設けられ、受信パルスを抽出するタイミングを規定するサンプルパルスをフィルタリングする。このとき、受信フィルタ22の通過帯域は、送信フィルタ12の通過帯域より広く、サンプルパルスフィルタ24の通過帯域は、等価時間サンプリングパルスレーダの基板の共振帯域を除いた帯域である。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段で今回検出された各検出点をグルーピングするグルーピング手段3と、前回のグループに基づいてグルーピング手段3で今回グルーピングされた複数のグループを統合する統合手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
1 - 20 / 49
[ Back to top ]