
Fターム[5J070BB16]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡の特徴 (317) | 追跡フィルタ (76)
Fターム[5J070BB16]に分類される特許
1 - 20 / 76
追尾装置
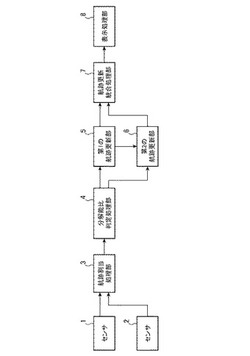
【課題】高分解能センサ及び低分解能センサによる航跡に対して正確な割り当てを行うことで、真の目標数分の航跡を生成する。
【解決手段】目標を観測して航跡を生成するセンサ1と、センサ1より低分解能であり、目標を観測して航跡を生成するセンサ2と、センサ1,2により生成された航跡を1対1で割り当てる航跡割当処理部3と、割当結果に応じて、センサ1により生成された航跡を、センサ2により生成された対応する航跡に基づいて更新する第1の航跡更新部5と、割当結果に応じて、センサ1により生成された未割当ての航跡を、センサ2により生成された複数の航跡に基づいて更新する第2の航跡更新部6と、センサ1,2の分解能比に基づいて、第1,2の航跡更新部5,6の動作を制御する分解能比判定処理部4と、更新された航跡を統合する航跡更新統合処理部7とを備えた。
(もっと読む)
航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法

【課題】センサ間の相関処理結果が矛盾しても、相関処理結果を各センサで即時に一意的に決定して、全センサで同一のシステム航跡情報を得る。
【解決手段】相関処理部122(航跡間相関部)は、追尾処理部113が生成した自センサローカル航跡情報と、受信部121が受信した他センサローカル航跡情報433とを照合して、自センサシステム航跡情報422(航跡間対応関係)を生成する。システム航跡情報照合部123は、受信部121が受信した他センサシステム航跡情報434と、自センサシステム航跡情報422とを照合する。システム航跡情報修正部124は、システム航跡情報照合部123によるシステム航跡情報照合結果423を用いて、結果が一致するように自センサシステム航跡情報を修正する。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置を提供する。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、該観測値を取得した機器の動作モードである捜索モード又は追尾モードに応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する座標系制御部から構成される。
(もっと読む)
目標追随装置、誘導装置及び目標追随方法
【課題】カルマンフィルタを用いて正確に目標をトラッキングすることが可能な目標追随装置を提供する。
【解決手段】目標追随装置は、レーダ受信機、サンプル選択部及びトラッキングフィルタ部を具備する。レーダ受信機は、イルミネータからの送信波が目標で反射した反射波を受信し、受信した反射波に基づいて目標への角度及び反射波の受信電力を取得する。サンプル選択部は、受信電力の値が、過去の受信電力に基づいて設定される基準値から所定値以上減少しているか否かを判断し、基準値から所定値以上減少している場合、取得した角度及び受信電力を除去し、基準値から所定値以上減少していない場合、取得した角度及び受信電力を出力する。トラッキングフィルタ部は、サンプル選択部から出力される角度及び受信電力に基づき、目標の角度についてのトラックを推定する。
(もっと読む)
追尾装置
【課題】フィルタを簡易に切り替えて早期に目標に追従可能とし、計算量の削減を図る。
【解決手段】等速直線運動モデル、蛇行運動モデル、多重運動モデルに基づくカルマンフィルタを用い、観測値から予測値、予測誤差共分散行列、観測誤差共分散行列および平滑値を算出する各カルマンフィルタ処理手段3〜5と、観測値、カルマンフィルタ処理手段3による各値に基づいて、目標が等速直線運動であるかを判定する等速直線運動判定手段7と、観測値、各カルマンフィルタ処理手段による各値に基づいて、各運動モデルに対する尤度を算出する尤度計算手段6と、各運動モデルに対する尤度および等速直線運動判定手段7による判定結果に基づいて、各運動モデルに対する信頼度を算出する信頼度計算手段8と、各運動モデルに対する信頼度に基づいて、各平滑値の加重平均値を算出する加重平均計算手段9とを備えた。
(もっと読む)
追尾装置
【課題】センサと目標との距離が大きい場合には追尾維持性能を発揮し、センサと目標との距離が小さい場合には、各追尾目標に対する追尾精度を向上させる。
【解決手段】センサを介して2つの観測値を取得した場合に、センサ位置を基準点とした2つの観測値のなす角度を算出する角度算出部21と、角度算出部21により算出された2つの観測値のなす角度に基づいて2つの観測値に対する重み係数を算出し、重み係数に基づいて各観測値の各観測値間での重心をそれぞれ算出する角度基準重心算出部22と、角度基準重心算出部22により算出された各観測値の重心および各追尾目標に対する予測値に基づいて、各追尾目標に対する平滑値を算出する平滑処理部24とを備えた。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
弾着観測装置
【課題】 従来の弾着観測装置は、追尾目標に対するビームの受信信号から水柱を検出し、弾着位置として観測していたが、弾丸が目標の近くに弾着した場合や波が荒れている場合、水柱が目標の陰に隠れてしまう場合等、水柱の検出が困難な状況では弾着位置を観測できず、追尾目標と弾着位置との誤差を出力できないことが課題であった。
【解決手段】 弾丸に対しビームを照射した受信信号から検出される弾丸の観測値をもとに弾丸の弾道を算出し、その高度が0となるときを弾着位置として算出するとともに、弾丸が水面に着弾したときに発生する水柱から弾着位置を算出する。
(もっと読む)
目標追跡装置
【課題】等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させた目標追跡装置を得る。
【解決手段】外部から入力される目標の状態ベクトルに基づいて、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出する補正情報算出部5aと、パッシブセンサからの測角データと補正情報算出部からの補正情報とに基づいて、該パッシブセンサを中心とする座標系における複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部2aを備える。
(もっと読む)
レーダ装置
【課題】本発明は、レーダ装置に係り、追尾対象の物標を正確に検出することにある。
【解決手段】電波を送信する送信手段と、送信手段から送信される電波の反射波を受信し得る受信手段と、受信手段に受信される信号のうちから反射波の信号レベルと反射波以外の信号レベルとを閾値により区別する受信信号レベル判定手段と、受信信号レベル判定手段により区別された反射波を示す信号に基づいて、物標の距離又は方位を検出する物標検出手段と、物標検出手段により検出される距離又は方位の時間的変化量が所定量以下である物標を追尾対象に、かつ、該時間的変化量が該所定量を超える物標を追尾対象外に、それぞれ設定する物標設定手段と、物標設定手段により設定される追尾対象の物標及び追尾対象外の物標に基づいて、受信信号レベル判定手段にて用いる閾値を変更する閾値変更手段と、を設ける。
(もっと読む)
センサ統合システム及びセンサ統合方法
【課題】複数種類のセンサによる観測データを組み合わせて、目標物の高精度な移動軌跡を抽出する。
【解決手段】プロセッサと、前記プロセッサに接続される記憶装置と、前記プロセッサに接続される出力装置と、を備えるセンサ統合システムであって、前記記憶装置は、複数のセンサによって観測された観測データを保持し、前記観測データはあらかじめ規定された項目のうち選択的に記述された項目を含み、前記プロセッサは複数の前記観測データの選択記述された前記項目を組み合わせ、一つ以上の目標物の移動軌跡を推定し、前記出力装置は、前記移動軌跡を示す情報を出力する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】移動体が雷雲などの進入禁止域を回避するために経路が変更される場合でも、移動体の将来位置などを高精度に推定することができるようにする。
【解決手段】進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出部14と、回避用加速度算出部14により算出された進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定部15とを設ける。
(もっと読む)
レーダ装置
【課題】昇順および降順周波数シーケンスを用いて送受信された信号同士の複素乗算結果から2次元フーリエ変換を用いて目標相対速度を計測可能なレーダ装置を得る。
【解決手段】目標相対速度情報取得手段11と、送信波形諸元を生成する送信波形制御器1と、任意周波数発振器2と、90度ハイブリッド器7と、送信機3と、送信機3からの信号を目標に照射して反射された信号を受信するアンテナ4と、分配器5と、位相検波器6a、6bと、低域通過フィルタ8a、8bと、A/D変換器9a、9bと、ビデオ信号記憶手段10と、目標相対速度Vdを用いて信号を補正する相対速度補正処理器12と、合成帯域処理器13と、目標距離Rを計測する目標検出処理器14とを備える。
(もっと読む)
レーダ装置
【課題】PRIを変えることなく、目標相対速度および所望のクラッタ抑圧性能に応じて、送信波形諸元を適応的に変化させるレーダ装置を得る。
【解決手段】目標相対速度情報取得手段1と、パルス繰返し周期を変えることなく、目標相対速度Vdに対するクラッタ抑圧処理損失を低減するための送信波形諸元を生成する送信波形制御器2と、任意周波数発振器3と、90度ハイブリッド器8と、送信機4と、送信機からの信号を目標に照射して反射された信号を受信するアンテナ5と、分配器6と、位相検波器7a、7bと、低域通過フィルタ9a、9bと、A/D変換器10a、10bと、ビデオ信号記憶手段11と、MTI処理器12と、目標相対速度Vdを用い、クラッタ抑圧処理された信号を補正する相対速度補正処理器13と、合成帯域処理器14と、目標距離Rを計測する目標検出処理器15とを備える。
(もっと読む)
レーダ装置
【課題】安定した相関追尾ができるレーダ装置を提供する。
【解決手段】FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器20と、送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部36と、ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部37と、相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部38を備える。
(もっと読む)
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
エコー信号処理装置、レーダ装置、エコー信号処理プログラム及びエコー信号処理方法
【課題】簡単な構成で、物標追尾等の処理で用いることができる有用な情報を取得することが可能な信号処理装置を提供する。
【解決手段】信号処理装置3は、スキャン相関処理部33と、物標状態判別部38と、を備える。スキャン相関処理部33は、第1の時刻に受信された第1エコー信号のレベルと、前記第1の時刻よりも前の第2の時刻に受信された第2エコー信号のレベルと、に基づいて、第1の時刻におけるスキャン相関信号レベルを出力する。物標状態判別部38は、第1エコー信号のレベルと、第1の時刻におけるスキャン相関信号レベルと、に基づいて、第1エコー信号に対応した物標の状態を判別する。
(もっと読む)
経路予測装置
【課題】観測データが長期間に亘って欠けている時においても信頼性ある経路予測が可能な経路予測装置を得る。
【解決手段】観測情報記憶部に記憶されている観測情報を監視し解析し、観測データが得られている間は該観測情報の解析結果を元に上記目標側経路評価関数パラメータ値調整部を周期的に実行し上記目標側経路評価関数パラメータ値記憶部に記憶されているパラメータの値を調整し、観測データが欠けている間は上記目標側経路評価関数パラメータ値記憶部に記憶されているパラメータの値を上記目標側最適経路生成部に入力して目標側最適経路を生成させる経路予測システムタスク実行部を含み、経路予測システムタスク実行部は、観測情報の解析結果に応じて、目標側経路評価関数パラメータ値調整部で調整するパラメータの数を変更する。
(もっと読む)
追尾装置
【課題】大目標と小目標との観測値の取り合いによる追尾性能の劣化を回避し、高精度の航跡を生成可能な追尾装置を得る。
【解決手段】センサ10と、位置相関マトリクスを生成する位置相関処理部20と、セル数相関マトリクスを生成するセル数相関処理部30と、位置相関マトリクスおよびセル数相関マトリクスを用いて相関調停結果を生成する相関調停処理部40と、相関調停結果を用いて観測値クラスタを生成する位置クラスタリング処理部50と、統合セル数観測値を監視する統合セル数観測値監視処理部 60と、カルマンフィルタにより統合セル数推定値および更新後の統合セル数予測値を生成する統合セル数更新予測処理部70と、カルマンフィルタにより航跡の位置速度予測値および位置速度推定値を生成する位置速度更新予測処理部80と、遅延処理部90と、表示処理部100と、を備える。
(もっと読む)
予測装置及び予測システム及びコンピュータプログラム及び予測方法
【課題】観測対象の将来の位置を高い精度で予測する。
【解決手段】観測装置810(位置観測装置)は、移動体(観測対象)の位置を観測する。ジャイロセンサ820(角速度観測装置)は、移動体の角速度を観測する。バイアス補正部141(角速度誤差推定装置)は、観測装置810が観測した位置に基づいて、ジャイロセンサ820が観測した角速度の誤差を推定する。バイアス補正部141(角速度補正装置)は、推定した誤差に基づいて、ジャイロセンサ820が観測した角速度を補正する。運動状態外挿部180(予測位置算出装置)は、バイアス補正部141が補正した角速度に基づいて、移動体の将来の位置を予測する。
(もっと読む)
1 - 20 / 76
[ Back to top ]